
Fターム[3B150QA06]の内容
Fターム[3B150QA06]に分類される特許
141 - 160 / 877
刺繍データ作成装置及び刺繍データ作成プログラム
【課題】画像の色をより的確に表現した刺繍模様を形成する刺繍データを作成する刺繍データ作成装置及び刺繍データ作成プログラムを提供すること。
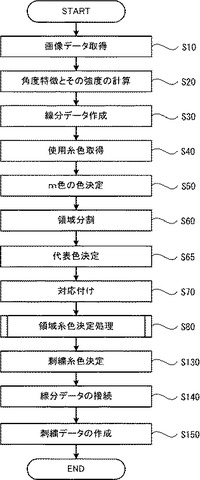
【解決手段】画素データに基づいて、前記画像データによって表される画像が複数の分割領域に分割され(S60)、分割された分割領域毎に、代表色が決定される(S50)。画像データに基づき作成された線分データと、分割領域とが、対応付けられる(S70)。代表色と使用糸色とを比較して、使用糸色の中から、所定条件を満たす糸色が領域糸色として分割領域に割り当てられる(S80)。領域糸色の中から、注目画素の色を表現する糸色が刺繍糸色として線分データに割り当てられる(S130)。刺繍糸色が同じである複数の線分データが接続される(S140)。線分データ、刺繍糸色、及び接続線分データに基づいて刺繍データが作成される(S150)。
(もっと読む)
ミシンの生産数量カウント装置

【課題】ミシンの生産数量をより精度良くカウントする。
【解決手段】ミシン10が被縫製物に対して行う一つの作業工程の実行数を生産数量としてカウントするミシンの生産数量カウント装置において、作業工程中のイベントを検出するイベント検出手段41と、イベントの予定回数を設定入力するイベント回数設定手段20と、イベントの発生を検出してその発生回数を記録するイベント計数手段41と、イベントの発生回数が設定された予定回数に達すると生産数量を一つカウントする生産数量計数手段41と、イベントを実行させるエラーの発生を検出するエラー検出手段14とを備え、イベント計数手段は、エラーの発生が検出された場合にイベント発生回数の記録値を一つ減じる処理又はエラー検出時のイベントについて発生回数として記録しない処理を行う。
(もっと読む)
ミシン
【課題】可動部同士の干渉を適確に検出する。
【解決手段】縫い針の上下動を行う針上下動機構と、縫製に関連する動作を実行する第一の縫製動作機構30と、縫製に関連する他の動作を実行する第二の縫製動作機構50と、各縫製動作機構のそれぞれの駆動源36,54を縫製縫製工程の進行に合わせて予め定められた動作が行われるように制御する動作制御手段80とを備え、第一の縫製動作機構の可動部31と第二の縫製動作機構の可動部52とは互いに同方向に沿った変位を生じると共に、第二の縫製動作機構には、その駆動源に位置検出器56が設けられ、動作制御手段は、第二の縫製動作機構が停止し、第一の縫製動作機構のみが動作を行う場合に、第二の縫製動作機構の位置検出器から得られる偏差に応じて各縫製動作機構同士の干渉の発生を検出する干渉監視制御を行う。
(もっと読む)
飾り縫いミシン
【課題】飾り縫いミシンの縫い品質を向上させる。
【解決手段】複数の縫い針21,22を上下動させる針上下動機構と、各縫い針の針糸Tを引き上げる天秤51,52と、各縫い針を布より上位置で停止させるための上位置検出手段と、被縫製物の押さえと解放を切り換え可能な布押さえ44と、各縫い針の挿通部102と片持ちの針板爪101を有する針板100と、各縫い針の針糸に個々に糸張力を付与する糸調子機構30とを備え、糸調子機構から各縫い針までの針糸の間に設けられ、各針糸ごとに被縫製物の回転操作に応じた個々の糸繰り出し量で繰り出しを行う糸繰り出し機構60を備え、上位置検出が行われて縫い針が停止した時に、糸繰り出し機構による各針糸の繰り出しを行う制御手段80を備えている。
(もっと読む)
ミシンの下糸検出装置
【課題】糸埃の影響を受け難く、誤検知を発生し難くできるミシンの下糸検出装置を提供する。
【解決手段】下糸Fが巻かれるボビン7は少なくとも鍔部11を磁性体により形成し、その鍔部11に複数の検出用開口部12を形成する。そのボビン7を収容するボビンケース6にセンサ用開口部9を形成する。ボビンケース6の前方に、誘導形の近接センサ15を配設する。近接センサ15は、正規の検出位置で、検出面15aがセンサ用開口部9を通して鍔部11の側面11aに対向させる。近接センサ15は、ボビン7の回転に基づき検出信号を出力する。
(もっと読む)
ミシン
【課題】刺繍枠に対する加工布の張り替え前後における刺繍模様の相対位置を正確に一致させることが可能なミシンを提供する。
【解決手段】刺繍模様「A」は、第一A模様142と第二A模様143とにあらかじめ分割されている。はじめに、加工布100に対して第一A模様142が縫製される。縫製後、加工布100に標識120が貼付される。貼付された標識120はイメージセンサによって撮影され、その位置及び角度が検出される。刺繍模様のうち第一A模様142に隣接する第二A模様143を縫製するために、刺繍枠34に対して加工布100が張り替えられる。張り替え後、標識120がイメージセンサによって撮影され、その位置及び角度が検出される。加工布の張り替え前後での位置及び角度に基づいて、第二A模様143を縫製する為の刺繍データが変換される。変換された刺繍データに基づいて、第二A模様143の縫製が実行される。
(もっと読む)
上下送りミシン
【課題】ローラによる布への押圧力の微調整を行い、高レスポンスで調整すること。
【解決手段】下側の被縫製物の送り動作を行う送り歯1と、上側の被縫製物の送り動作を行う送り足2と、送り方向に交差する方向に往復移動させる下側ローラ3と、下側ローラを回転させる下側駆動手段4と、送り方向に交差する方向に往復移動させる上側ローラ7と、上側ローラを回転させる上側駆動手段8と、各ローラとで被縫製物を挟み込む分離板11と、被縫製物が所定位置にあるか否かを検知する検知手段12と、下側ローラを下側の被縫製物に押し付ける下側押圧手段6と、上側ローラを上側の被縫製物に押し付ける上側押圧手段10と、各部の駆動を制御する制御手段13と、を備える上下送りミシン100において、各押圧手段は、通電した電流量に応じて各ローラを介して被縫製物に対する押圧力が調整自在とされ、制御手段は、各押圧手段に通電する電流量を個別に制御する。
(もっと読む)
ベルトループ付けミシン
【課題】適正なベルトループの縫着を行う。
【解決手段】針上下動機構と、ループクランプ31と、ループ押さえ52と、載置台51と、布押さえ71と、第一の移動機構50と、第二の移動機構70と、クランプ移動機構30と、単一のフォーク部材38とを備え、第二の移動機構の駆動源を布送りモータ74とし、ループクランプが挟持するベルトループBの幅方向に折り目となる折り目縫い目L2を形成し、当該折り目縫い目から折り返される方向にクランプ移動機構によりループクランプを移動させ、折り返されたベルトループにより隠れた状態となる折り目縫い目の上から重ね縫い目L3を形成する重ね縫い目形成制御と、重ね縫い目形成制御の実行の際に、第二の移動機構の布送りモータを制御して設定補正量に応じて折り目縫い目に対して重ね縫い目の形成位置を補正する制御を行う重ね縫い目位置補正制御とを行う制御手段80を備えている。
(もっと読む)
ミシン
【課題】位置誤差の発生を防止しつつ、縫製効率の低下を極力抑えること。
【解決手段】第1のモータ25及び第2のモータ26のトルクを算出するトルク算出部40と、一針毎のトルクを記憶するトルク記憶部44と、許容トルクの閾値を記憶する閾値トルク記憶部44と、表示部31と、針数とトルクとの関係を表示部にグラフで表示する描画制御部40と、記憶された許容トルクの閾値以上のトルク値の針落ち位置と閾値未満のトルク値の針落ち位置とを異なる表示形態で識別表示する識別表示制御部40と、許容トルクの閾値以上のトルク値となった針落ち位置での主軸モータ6の駆動速度の調節するための新たな駆動速度の入力を行う入力部32と、縫製データ51のうち、許容トルクの閾値以上のトルク値となった針落ち位置に対応する主軸モータの駆動速度を、入力部から入力された新たな駆動速度に書き換える縫製データ書換制御部40とを備える。
(もっと読む)
ミシンの制御装置
【課題】高速で効率よく縫製作業を行うことができるとともに、ミシン操作の不慣れな作業者の習熟度や縫製速度の向上を図る。
【解決手段】レコーディングモードにおける操作位置信号の加速指令区間の加速変化率および減速指令区間の減速変化率を、それぞれ対応する加速指令区間の加速開始針数および減速指令区間の減速開始針数に関連づけて記憶させる記憶制御手段12cを備えたレコーディング制御部12と、アシストモードで出力される加速指令部分の操作位置信号を、当該加速指令部分の加速変化率がその加速開始位置の計数値に最も近い加速開始針数に関連づけて前記レコーディングモードにおいて記憶された加速変化率に近づくように補正し、減速指令部分の操作位置信号を、当該減速指令部分の加速変化率が減速開始位置の計数値に最も近い減速開始針数に関連づけて前記レコーディングモードにおいて記憶された減速変化率に近づくように補正する補正制御手段13bを備えたアシスト制御部13とを有する。
(もっと読む)
ミシン
【課題】刺繍枠に保持された加工布に刺繍縫製可能なミシンにおいて、刺繍縫いの実行中に糸切れが発生した場合に、スムーズに針落ち点の調整を行う機能を提供する。
【解決手段】糸切れが発生して縫製が停止された場合に、針元近傍の画像を撮像する。そして、撮像した針元近傍の画像と、針落ち点を1針進めるための一針前進キー122と、針落ち点を1針戻すための一針後退キー123とを同時に表示させたステップF/B画面120を液晶ディスプレイ15に表示する。ユーザはこのステップF/B画面により、針元近傍の画像を確認しながら、針落ち点の調整を行うことができる。
(もっと読む)
ミシン
【課題】縫目の美観の損失及び品質の低下を防止することができるミシンを提供する。
【解決手段】下糸掴み79と下糸掴みバネ91とを上下方向に移動可能とする。下糸掴み79及び下糸掴みバネ91を上昇させて加工布Wに近づけた状態とし、この状態で上糸Tにループを形成させることで、下糸Sにおける上記保持位置P2と上記絡み位置P1とを比較的近接させることができる。この結果、下糸Sにおける絡み位置P1から保持位置P2までの長さを低減することができるので、加工布Wの下面に縫い込まれていく下糸Sの切断端部Seの長さを短くすることができる。
(もっと読む)
多針ミシンの照明装置
【課題】照明部材が上糸の糸掛け作業等の邪魔にならず、且つ針棒ケースの移動に関わりなく針落ち位置にて所定の照度を維持することができる多針ミシンの照明装置を提供する。
【解決手段】多針ミシンの照明装置は、チップLEDを有して針棒ケースの側面部に設けられ、且つ針棒の手前側及び縫針の手前側を開放するように配置された照明具27a,27bと、チップLEDの光量を調節する駆動回路48a,48bと、針棒ケースを照明具27a,27bと共に移動させることに伴い、チップLEDにより照明される被照明領域のうち少なくとも針落ち位置近傍が所定の照度を維持するように駆動回路48a,48bを制御する制御装置8とを備える。
(もっと読む)
ミシン
【課題】 ジャージ生地のような柔らかく伸縮性があり、厚みのあるたわみ易い布を縫製する際、ループが形成されて目とびの発生が抑制され、良好な縫製ができ、且つコストの安いミシンを提供すること。
【解決手段】 機枠2と、機枠2に回転自在に支持されて針棒12を駆動する上軸3と、機枠2に回転自在に支持されて釜41を駆動する下軸17と、上軸3と下軸17を連結し上軸3の回転と下軸17の回転を同期するタイミングベルト22と、タイミングベルト22に常時接触するプーリ13、14を備え、テンションプーリ13、14の振り幅により上軸3と下軸17の位相を変える針釜タイミング調整機構23と、を備えるミシン100であって、針棒12に固定した針39が刺さった布のたわみを考慮して、針落ち位置に応じて針39と釜41との出会いのタイミングを調整する。
(もっと読む)
ミシン
【課題】縫目の美観の損失及び品質の低下を防止することができるミシンを提供する。
【解決手段】針板120にガイド溝124を設け、下糸Sの切断端部Seを針穴121へと誘導する。これにより、上糸Tと下糸Sとが絡み合って縫目を形成するときにも、縫目に引き込む下糸Sの切断端部Seを、ガイド溝124に倣いながら暴れることなく円滑に針穴121へと導くことができる。縫目の完成後に、暴れた下糸Sの切断端部Seの一部が縫目からはみ出して美観を損ねたり、下糸Sの切断端部Seが加工布Wの表側に出ることを防げるので縫目品質を低下させたりするのを防止することができる。
(もっと読む)
ミシン及びミシンの縫製方法
【課題】縫目の美観の損失及び品質の低下を防止することができるミシン及びミシンの縫製方法を提供する。
【解決手段】ハサミ83が切断してフリーとなり加工布Wの下面に縫い込んでいく下糸Sの切断端部Seを、下糸掴み79と下糸掴みバネ91とで一旦保持するのみならず、下糸掴み79と下糸掴みバネ91とが保持を解除した後もさらに保持板140で二次的に保持する。これにより、縫製開始後に上糸Tと下糸Sとが絡み合って縫目を形成するときに、縫目に引き込む下糸Sの切断端部Seを、円滑かつ安定的に縫目に縫い込んでいくことができる。
(もっと読む)
ミシンの玉布供給装置
【課題】コストの高騰を抑え、組み付けの調整やメンテナンスを容易にすると共に、縫製品質の低下を防止する。
【解決手段】玉布が載置される載置台3と、玉布を把持する把持機構4と、把持機構を移動させる接離機構5と、把持機構を駆動させる駆動機構6と、把持機構と一体に構成され、玉布を折り込むガイドとなる玉布定規9と、各機構の駆動制御を行う制御装置110と、を備えるミシンの玉布供給装置1において、駆動機構は、把持機構を下方に移動させる上下移動機構7と、把持機構を駆動させて玉布を身頃布上に載置した後、玉布定規の一端部が針元にくるように把持機構を移動させる水平移動機構8と、を備え、制御装置は、大押さえによる身頃布の縫製前の準備搬送に連動して玉布定規が大押さえと同じ速度で移動するように水平移動機構の駆動を制御する。
(もっと読む)
ミシン
【課題】 段縫い時に段差部での目とびの発生を抑えたミシンを提供すること。
【解決手段】 機枠2と、機枠2に回転自在に支持されて針棒12を駆動する上軸3と、機枠2に回転自在に支持されて釜41を駆動する下軸17と、上軸3と下軸17を連結し上軸3の回転と下軸17の回転を同期するタイミングベルト22と、タイミングベルト22に常時接触するテンションプーリ13、14(プーリ)を備え、テンションプーリ13、14の振り幅により上軸3と下軸17の位相を変える針釜タイミング調整機構23と、を備え、段縫い時には針釜タイミング調整機構23により、針39と釜41の出会いのタイミングを調整する。
(もっと読む)
穴かがりミシン
【課題】容易に能率よく糸通し作業を行うことができる穴かがりミシンを提供する。
【解決手段】操作者が操作パネル4の選択キー113を用いて糸通しモードを設定すると、制御装置5が制御するカッター進退用ステッピングモータ91の駆動力によって、カッター51が待機している初期位置より、縫針32から遠ざかる退避位置へと移動する。これにより、糸通し作業時にカッター51が妨げになるのを回避し、容易に能率よく糸通し作業を行うことができる。
(もっと読む)
穴かがりミシン及び縫製パラメータの算出方法
【課題】複数種類のカッターを装着して使用する場合における操作者の操作労力負担を低減できる穴かがりミシン及び縫製パラメータの算出方法を提供する。
【解決手段】カッターセンサ105がカッター51の後方側端部位置と前方側端部位置を検出し、その検出したカッター51の位置に応じて、制御装置5がカッター51のカッター寸法を算出するとともに、カッター51の前方側端部位置と出荷時の設定位置とに基づき、カッターY位置補正を算出する。この結果、操作者が異なる種類のカッター51を装着する都度、手動操作で縫製プログラムの変更やカッター寸法やカッターY位置補正の入力を行ったり試し縫製を実行する必要がない。
(もっと読む)
141 - 160 / 877
[ Back to top ]