
Fターム[3C007AS15]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 清掃 (46)
Fターム[3C007AS15]に分類される特許
1 - 20 / 46
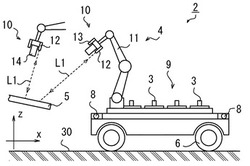
清掃ロボットシステム及びその制御方法
【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
窓ガラスなどの清掃装置

【課題】建造物のガラス製壁面或いは窓面などに真空吸着し且つこれに沿って移動しながら清掃作業を施す装置を提供する。
【解決手段】横並びで配置された3式の吸着ユニットにおいて、吸着ユニットの各々は、吸着ユニットを表面と交差する方向に出入りさせる吸着ユニット前後方向出入手段80を具備し、隣り合った吸着ユニット同士は、吸着ユニット前後方向出入手段を介して横方向伸縮手段62により連結されて横一列吸着ユニット群を構成しており、隣り合った該横一列吸着ユニット群同士は、該吸着ユニット前後方向出入手段を介して縦方向伸縮手段68により連結される。吸着ユニットの各々は、表面に吸着しながら且つ該表面に沿って移動される吸着可動状態と、該表面に係止される吸着係止状態と、表面から隔離しながら且つ該表面に沿って移動できる非吸着可動状態、の以上3つの状態のいずれかを選択できる。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】ユーザが、室内の所望の場所のみの掃除を行わせる作業等(その内容を確定させるために場所の指定を必要とする作業)をロボットに容易に行わせることが可能な環境を実現できるロボット制御システムを提供する。
【解決手段】ロボット制御システムを、ディスプレイ21上に、管理対象エリアの状況/様子を示す画像を表示するシステムであって、ディスプレイ21に表示されている画像上にユーザによって描画された線分図形の形状及び位置から、ロボット25に行わせるべき作業の内容を把握し、把握した内容の作業を行うようにロボット25を制御するシステムとして構成しておく。
(もっと読む)
清掃ロボットシステム及びその制御方法
【課題】 太陽光発電及び太陽熱発電システムで使用される太陽電池パネルや反射鏡などの板状部材を、作業性が高く、かつ経済的に清掃するための清掃ロボットシステム及びその制御方法を提供する。
【解決手段】 太陽光発電用パネル又は太陽熱発電用反射鏡の平面状あるいは曲面状の板状部材4a、4bを清掃する清掃ロボットシステム1であって、清掃の対象となる前記板状部材4上を走行する機能と清掃する機能を有した多数の清掃ロボット2と、前記清掃ロボット2を第1の板状部材4aから第2の板状部材4bへ移動させる搬送機能を有しているアレンジロボット3とを備えており、前記清掃ロボット2が、前記板状部材4に吸着しながら清掃を行うための吸着機構を有しており、多数の前記清掃ロボット2と、前記清掃ロボット2よりも少ない数の前記アレンジロボット3が協働して、太陽光発電又は太陽熱発電プラントに設置された板状部材4を清掃する。
(もっと読む)
エアーブロー装置
【課題】エアーホースがロボットアームに巻き付くことがなく、その結果エアーホースがロボットアームに擦れて表面に付着したホコリ、ブツが剥離し、落下することによる塗装面の不良を招くことがないエアーブロー装置を提供する。
【解決手段】自動車ボディの電着塗装における塗料若しくは水洗水の二次タレを防止するために使用されるエアーブロー装置1は、ロボットアーム2の先端にブラケット3によりエアーホース9が接続されたエアーブローノズル4が取り付けられており、エアーブローノズルの先端にノズルヘッド6を有する回転プレート5が回転可能に取り付けられている。エアーブローノズル先端部の回転プレートが回転してもエアーホースが接続されているエアーブローノズルは回転しないので、エアーホースがロボットアームに巻き付くことがない。
(もっと読む)
除塵システム及び除塵ロボット
【課題】除塵作業後の被除塵物に粉塵が再付着するのを抑止する。
【解決手段】粉塵拭き取り用又は粉塵掃き取り用のワイプ部材4を備える除塵ロボット6を設け、搬送手段により搬送される被除塵物2をワイプ部材4で除塵する除塵用動作を除塵ロボット6に実行させる構成にするとともに、被除塵物2から離れた位置に設定した清掃域でワイプ部材4の清掃が実施可能なように、除塵用動作後のワイプ部材4を清掃域に移動させる清掃用動作を除塵ロボット6に実行させる構成にする。
(もっと読む)
自律型ロボット及び自律型ロボットを複数用いる協調作業システム
【課題】作業領域での作業時間を考慮し、複数の自律型ロボットが協調して作業する自律型ロボット及び自律型ロボットを複数用いる協調作業システムを提供し、作業効率を最適化する。
【解決手段】複数の雑草群Zが存在する圃場Hにて雑草群Zを順に移動して除草作業を実施する除草ロボット10は、現在位置から雑草群Zまでの距離を評価距離とし、前記雑草群Zの雑草面積とし、雑草群Zと、該雑草群Zの最も近い、他の除草ロボット10が除草作業を実施している雑草群Zとの距離を分散距離とし、前記評価距離のみ正負の異なる係数を用いる該評価距離と前記雑草面積と前記分散距離との線形結合を評価値とし、該評価値に基づいて次に除草作業を実施する除草作業領域である雑草群Zを選定する。
(もっと読む)
ロボット洗浄装置
【課題】複雑な形状の被洗浄物であっても効率よく洗浄及び乾燥が可能なロボット洗浄装置を提供する。
【解決手段】先端に高圧液体及び高圧気体を噴射する噴射装置111を有するロボットアームと、被洗浄物61を支持する支持冶具12Bと、支持冶具12Bを回転させる支持冶具回転モータ13と、噴射装置111及びロボットアーム11及び支持冶具回転モータ13の動作を制御する制御部17と、を備え、制御部17が入力されたプログラムに従ってロボットアーム11と噴射装置111と支持冶具回転モータ13の動作を制御して被洗浄物の洗浄と乾燥とを行う。
(もっと読む)
移動ロボット用粉塵除去機構
【課題】移動ロボットの運転時間が長い場合であっても、小さな容量の圧力タンクで対応することができる移動ロボット用粉塵除去機構を提供する。
【解決手段】粉塵除去用のエアーノズル4と、圧力タンク5と、移動ロボット1の駆動エネルギーを利用して駆動するエアーポンプ6と、エアーノズルと圧力タンクとの間に介設された弁装置8と、圧力タンク5内のエアー圧を検知する圧力センサー9とが備えられ、制御機構部10により、圧力センサー9で検知されたエアー圧が所定の高圧圧力値に達したとき、弁装置8を開いてエアーノズル4から高圧エアーを吐出させ、吐出後、弁装置8を閉の待機状態に復帰させる制御が行われるようになされている。
(もっと読む)
配管内作業装置および配管内作業方法
【課題】本発明は、配管を取り外すことなく、配管内面を精度良く正確に移動可能で、配管内の洗浄、点検、検査、予防保全、補修などの作業について、配管を損傷させることなく、安全、確実に実施する。
【解決手段】配管2の内側から各種作業を行う。配管内作業装置1は、走行駆動部3a、3bと、作業装置5と、回転支持機構部9a、9bと、連結機構6と、吊り下げ装置8a、8bと、を備え、走行駆動部3a、3bを配管2の内面に挿入可能とし、これら走行駆動部3a、3bによって作業装置5をこの配管2の内面に沿って円周方向に移動可能に構成したものである。
(もっと読む)
パーティクルフィルター基盤の移動ロボットの姿勢推定方法、装置及び媒体
【課題】 パーティクルフィルター基盤の移動ロボットの姿勢推定方法、装置及び媒体を提供する。
【解決手段】 移動ロボットの現在姿勢で現在パーティクルをサンプリングする段階、移動ロボットの姿勢変化量を感知して以前パーティクルに感知された姿勢変化量を適用して現在パーティクルの姿勢を求める段階、センサーから獲得したレンジデータとマップ情報から現在パーティクルの姿勢確率予測及び加重値を求める段階、加重値に基づいて現在パーティクルをリサンプリングする段階及びセンサーの誤差を考慮して加重値を調整する段階を含むパーティクルフィルター基盤の移動ロボットの姿勢推定方法。
(もっと読む)
壁面間移動装置
【課題】壁面間で保持されながら落下せずに移動することができるだけでなく、エネルギー効率に優れ、移動速度を速くすることができ、移動速度の制御を容易に行うことができる壁面間移動装置を提供する。
【解決手段】本発明の壁面間移動装置は、壁面に押し付けられる複数の弾性毛1aが植え込まれた四対の滑走子1と、弾性毛1aが壁面に接触する範囲で滑走子1を振幅させる駆動手段2と、駆動手段2を支持する移動体本体3とを備え、駆動手段2は、移動体本体3に固定されたモータ4と、モータ4の回転運動を壁面に略垂直な方向に変換して滑走子1に伝達する加振機構5と、から構成されている。
(もっと読む)
水中清掃ロボット
【課題】イガイ等の着生生物の清掃作業に際し、清掃作業の高効率化を図ると共に、長距離清掃にも適合させる。
【解決手段】水路の壁面に着生している着生生物を掻き取る掻取り装置3と、該掻取り装置3によって掻き取られた着生生物を吸引する吸引口4と、前記壁面に接しながら移動する移動手段8を備えた水中清掃ロボットである。前記吸引口4に連通している破砕装置格納部16内に吸引口4から吸引された着生生物を破砕する破砕装置7を設け、かつ、該破砕装置7によって破砕された着生生物の破片を前記水路内に排出する。
(もっと読む)
対話ロボットシステム
【課題】本発明はRFタグと赤外線タグを装着した複数のユーザに対し対話・サービスを行う対話ロボットに関し,ユーザが直接見えないが近傍にいる場合や,ユーザがロボットの正面にいないがロボットの方向を向いて興味を示しいる場合や,ロボットの方を向いてない場合でも,ユーザに適したサービス,コンテンツを提供することを目的とする。
【解決手段】周囲に存在するユーザが装着するRFタグを読み取って各々のIDを検出するRFタグ信号読み取り手段と対話ロボットの胴体等の身体の全周に各方向に向けた複数個の赤外線信号の送・受信手段を設ける。RFタグ信号読み取り手段により周囲の一定エリアに存在するユーザのIDを検出してメンバリストを作成し,該メンバリストに基づいて複数方向の各赤外線信号の送・受信手段からIDを含む赤外線信号の送信し,どの赤外線信号の送・受信手段で受信したかを検出して相手の方向を識別するよう構成する。
(もっと読む)
自動走行ロボット
【課題】 管路の内壁面の形状、管路の傾斜角度に影響されずに、安定した円滑な走行が得られる自動走行ロボットを提供する。
【解決手段】 対向配置される少なくとも一対の脚部2、2と、各脚部2の外面2aに外方を向くように、かつ外面2aに対して所定の角度で傾斜するように配置される複数の毛状体5と、少なくとも一対の脚部2、2間に設けられて、脚部2、2を互いに接近、離隔する方向に駆動させる駆動手段6と、少なくとも一対の脚部2、2間に設けられて、各脚部2に振動を付加する加振手段20とを備える。駆動手段6は、少なくとも一対の脚部2、2間を連結する伸縮自在な連結機構7と、連結機構7を伸縮させるスライダ機構11と、スライダ機構11を駆動させる駆動機構14とを備える。
(もっと読む)
機能可変型ロボットシステムおよび機能可変型ロボット制御方法ならびに機能可変型ロボット制御プログラム
【課題】無駄な機能を購入することなくネットワークを用いた簡単なシステムで多様な作業を行うことができる機能可変型ロボットシステムを提供する。
【解決手段】車輪を駆動して移動する自律移動型ロボット10と、当該自律移動型ロボット10に着脱自在に取り付けられ、所定の機能を実行する複数の機能モジュール20と、自律移動型ロボット10の移動を制御するパーソナルコンピュータと、複数の機能モジュール20の制御プログラムを格納しているデータベースと、複数の機能モジュール20の各々に付加され、当該機能モジュール20固有の情報を格納している記憶手段24と、自律移動型ロボット10に搭載され、記憶手段24に記憶されている当該固有情報を読み取り、当該機能モジュールを識別する識別手段14と、を備える。
(もっと読む)
壁面移動装置
【課題】使い勝手が良い上、構成の簡易化を図った壁面移動装置を提供する。
【解決手段】ガイド部材3は、中空状のパイプ12と、吸着面側がパイプ12と連通した複数の吸盤6、6・・とを備え、パイプ12を介して空気を吸引することにより、吸盤6、6・・面内を負圧として壁面Wに吸着させ、ガイド部材3を壁面Wに対し固定可能とした。したがって、各吸盤6毎にモータ等を設置する必要がなく、製造コスト等を低コストに抑えることができる。加えて、ガイド部材3の固定にあたって、台車や支持機構といった大掛かりな装置を別途必要としないため、壁面移動装置のコンパクト化、組み立て作業の簡易化、汎用性の向上等といった効果を期待することができる。
(もっと読む)
遠隔操作システム
【課題】走行機器の走行状態に応じた力覚を提示することにより、視覚障害者も操作可能となるのみならず、操作者に対する興趣性を高めることができる遠隔操作システムを提案する。
【解決手段】リモコン1と、リモコン1により操作可能なロボットクリーナ3と、を備える遠隔操作システムSにおいて、リモートコントローラSには、走行機器から送信された走行状態に関する走行情報を受信するクリーナ通信部16と、当該受信された走行情報に基づいて、揺動レバー11に対して力覚を提示する力覚提示手段14と、を備え、ロボットクリーナ3には、リモコン1から送信された揺動レバー11の揺動量と揺動方向とに関する操作信号を受信するリモコン通信部35と、当該受信された操作信号に基づいて、ロボットクリーナ3の走行制御を行う走行制御プログラム3731を実行したCPU371と、を備えるよう構成した。
(もっと読む)
液体供給ステーションを備えた移動ロボットシステム及び移動ロボットの液体供給方法
【課題】 移動ロボットの使い勝手の良さ及び使用時間の延長のため、移動ロボットに使われる水やメタノールのような液体を自動的に供給する液体供給ステーションを備えた移動ロボットシステム及び移動ロボットの液体供給方法を提供する。
【解決手段】 本発明に係る液体供給ステーションを備えた移動ロボットシステム1は、自ら走行する移動ロボット30と、移動ロボット30に設けられ、移動ロボット30が使う液体を保存する液体タンク37と、移動ロボット30の供給信号に応じて、液体タンク37に液体を供給する液体供給ステーション10とを含む。
(もっと読む)
自律走行ロボットシステム
【課題】充電ステーションは自律移動ロボットの内蔵バッテリーが消耗した時に充電する以外の作業は行っておらず、センサ部が正常に機能しているかなどの点検作業を行ってくれるものは存在しなかった。
【解決手段】外界の情報を入力する外界情報入力手段9、10と電源13を有し自律走行する自律走行装置8と、電源13に商用電源から電力を供給する電力供給手段17を有する充電装置16を備え、充電装置16の電力供給手段17が自律走行装置8の電源13に電力を供給している間に、点検手段19が自律走行装置8の外界情報入力手段9、10が正常に動作しているか点検作業を実施することができるので、常に安全な状態で走行を開始することができる。
(もっと読む)
1 - 20 / 46
[ Back to top ]