
Fターム[3C007BT01]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | 手首軸 (426)
Fターム[3C007BT01]の下位に属するFターム
2軸手首 (85)
3軸手首 (135)
つれまわり防止機構を有するもの (8)
ハンドの向きを一定に保つもの (109)
Fターム[3C007BT01]に分類される特許
81 - 89 / 89
打楽器演奏マニピュレータとそのマニピュレータを備えたロボット
【課題】 アクチュエータの性能に関わらず、単打もロールも好適に実施することができるマニピュレータと、そのマニピュレータを備えるロボットを提供する。
【解決手段】 本発明のマニピュレータは、打楽器を演奏するマニピュレータであり、スティックと、スティックを回転自由に支持している支持部材と、スティックの先端が打楽器の打面に向かう側の回転力をスティックに付与しておく付勢手段と、スティックと当接することによってスティックの回転限界を規制するとともに支持部材に配置されているストッパと、支持部材を動かすアクチュエータとを備える。
(もっと読む)
産業用ロボット

【課題】 フォークが長くても、これを太くすることなく、フォークの先端の垂れ下がりを補正して搬送物を容易、迅速かつ的確に搬送することのできる産業用ロボットを提供する。
【解決手段】 フォーク16は、ボルト17によりハンド15に着脱可能に取り付けられている。ハンド15には、フォーク16の下面に当接してフォーク16の先端側を押し上げるようにシム21とシム押さえ22とからなるフォーク先端位置調整手段20が取り付けられている。このシム21は、予め種々の厚さのものが用意され、フォーク16の先端が元端とほぼ同じ高さとなる厚さのものが選択されて使用される。
(もっと読む)
マニピュレータおよび容器整列装置
【課題】高剛性で作業速度も高く、動作制御も容易な作業用マニピュレータを提供する。
【解決手段】基端支持部4と手先部5との間に両端部がそれぞれ回動自在に連結された3本のリンクのうち、2本を互いに平行で同一長さに形成して第1平行リンク機構PL1を形成する第1動力伝達軸L1および第2動力伝達軸L2とし、残りの1本を、第1平行リンク機構PL1の面F0に直交する面内で、第1,第2動力伝達軸L1,L2と互いに平行で同一長さの第2平行リンク機構PL2を形成する駆動アームAとした。
(もっと読む)
ロボット手首機構およびそれに取り付けられたエンドエフェクタ操作方法
【課題】 ロボット動作域に周辺機器等の配置が余儀なくされる場合、第6軸部駆動用モータの存在に基因してロボットの動作に制約が課されないようにする。
【解決手段】 エンドエフェクタ駆動台7は、傾動アーム5から独立した別部品で構成され、基準軸線2とで一平面を形成するように置かれた上下軸線を持つエンドエフェクタ装着部14の周囲に、センタから等距離にある複数の当接面17A,17B,17Cが形成される。傾動アーム5の下端には当接面17A,17B,17Cを着座させることができる接合座5Aが形成され、エンドエフェクタ回転用モータ搭載部15の傾動アーム5に対する位置を変更するとき、エンドエフェクタ装着部14における現用当接面17Aと異なる当接面17B,17Cを接合座5Aに付け替えることによりエンドエフェクタ駆動用モータ9を位置替えし、周囲物との干渉を回避できるようにした。
(もっと読む)
トランスファロボット
【課題】 ワーク搬送システムのスケールダウンおよび装置の小型化を図ることができ、かつ、ゴミなどの付着を防止しつつワークをスムーズに受け渡しすることができるトランスファロボットを提供する。
【解決手段】 トランスファロボットA1は、上下方向に開放したオープンスペース40をもつフレーム部材4と、オープンスペース40を跨いでフレーム部材4に梁状に設けられているとともに、ワークWの下面を支持しながら水平方向に伸縮する複数のスライドアーム機構5と、複数のスライドアーム機構5と上下方向に干渉することなくオープンスペース40内に収まるように設けられているとともに、フレーム部材4が下降移動して所定の位置にある状態では、相対的にオープンスペース40よりも上方に位置し、その際、ワークWを空気圧により浮上させて保持するエアベントステージ6とを備えている。
(もっと読む)
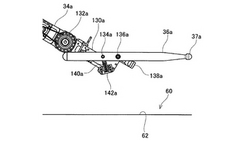
産業用ロボットの線条体処理構造
【課題】 ロボットの手首先端に装着された作業ツールにエア、電気等を供給する作業ツール用線条体の挙動安定化、及び周辺物体、前腕等との干渉防止。
【解決手段】 ロボット1の手首先端部に取付けられた作業ツールHへのエア供給/吸気を行なうための線条体7は、ロボット1の大きく張り出すことなく、第2手首要素12に取付けられた板状ガイド部材Gの自由端G1付近でガイド面G3に柔らかく接触し、そこから板状ガイド部材Gの長手方向に沿うようにガイドされた後、作業ツールHに接続される。板状ガイド部材Gの厚さを自由端G1に向けて漸減させても良い。ロボット最終軸による第3軸線C2周りの回転を伝動機構を介して第4軸線C3周りの回転に変換し、作業ツールHを回転させる。作業ツールHが回転しても、線条体7の挙動が不安定になることがない。作業ツールHを第3軸線C2周りで回転させることもできる。
(もっと読む)
駆動装置及びその駆動方法
【課題】 オープンループ制御により、精確な動作が可能な駆動装置及び駆動装置の制御方法を提供する。
【解決手段】 駆動制御部10から出力される制御信号に基づいて、ドライバ11から所定の駆動信号が出力されて駆動源15を動作させる。駆動制御部10による制御動作が終了すると、振動制御部12が駆動源を一定期間に正逆方向に交互に駆動させるような駆動制御信号を発生する。これにより駆動源15は微振動する。駆動源の微振動による駆動力方向の力が、摩擦力等の負荷により抑制され最後まで動作できずに残存している駆動力と合算されて、駆動方向の力が摩擦等の負荷よりも大きくなると、動作部は残存駆動力に応じた距離だけ移動する。これにより、駆動制御部10の制御信号に基づく動作が精確に実行される。
(もっと読む)
改良型自動リベッティングシステム
本発明は、1つの装置を用いて同じ作業点で、ボーリング、リーミング、リベット挿入、リベッティング、クリーニング等の複数の動作を行うことを可能にするためにロボット化設備で用いられるタイプの改良型自動リベッティングシステムに関する。本発明は、それ自体は動かずにパラレル運動機械上に固定されるマルチツールヘッドを用い、パラレル運動機械は、マルチツールヘッドの全ての位置決め移動を行って、ツールヘッドに設けられた個別のツールの異なる物理的位置間のオフセットに対し必要な補正を行うシステムを特徴とする。本発明の主要な利点は、システムが、複雑なツールヘッド変更機構の必要性をなくすことにより、ボーリング及び他の機能について異なる直径を得るようにし、それにより、上記装置のコストが大幅に削減されるとともに、その信頼性、精度、及び機械的寿命が高まることである。  (もっと読む)
(もっと読む)
カルテシアン座標型ロボット
1以上の対象物を掴みおよび取り扱うためのロボットであって、該ロボットは、
第一方向に延びる第一ガイドを持った固定ベース(1)を有し、かつ、アーム(2)を有し、該アームは第二ガイド(22)を有し、第二ガイドは、第二方向へ延びており、第一方向に対して角度をなし、好ましくは第一方向に対して直角をなし、該アーム(2)は、該アーム(2)が第一方向に移動可能となるように第一ガイドによってベース(1)に接続されている。スライド(3)が、第二ガイド(22)上に配置され、かつ、第二方向へ移動可能である。グリッパー(4)が、該スライド(3)によって支持されており、1以上の対象物を掴むためのものであり、該グリッパーは第三方向へ移動可能であり、該第三方向は第一および第二方向からなる面と好ましくは垂直に交差している。多数のアクチュエータ(6a-6d)が、ベース上の固定位置に設けられており、アーム(2)、スライド(3)、およびグリッパー(4)を、引張り要素によって駆動するためのものであり、該引張り要素は、例えば駆動ベルトであって、アーム(2)、スライド(3)、およびグリッパー(4)にそれぞれに接続されている。アーム(2)の中央の長手方向軸と交差し第二および第三方向へ延びている仮想平面に、グリッパー(4)が置かれている。
(もっと読む)
81 - 89 / 89
[ Back to top ]