
Fターム[3C007BT02]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | 手首軸 (426) | 2軸手首 (85)
Fターム[3C007BT02]の下位に属するFターム
2軸とも回転のもの (4)
2軸とも旋回のもの (15)
旋回と回転軸を有するもの (46)
Fターム[3C007BT02]に分類される特許
1 - 20 / 20
搬送ロボット
【課題】昇降駆動手段において必要となる昇降駆動力を低減することができる搬送ロボットを提供すること。
【解決手段】本発明の搬送ロボットは、第1軸線周りに回転可能に構成された第1リンク部材と、第1軸線に対して所定距離に位置する第2軸線周りに回転可能に構成された第2リンク部材と、第2軸線に対して所定距離に位置する第3軸線周りに回転可能であり且つ物品を保持可能に構成された保持部材と、少なくとも保持部材を昇降駆動するための昇降駆動手段と、を備える。第1リンク部材、第2リンク部材、及び保持部材が、この順番で連結されてアームリンク機構を構成しており、昇降駆動手段が、第1リンク部材と保持部材との間に配置されてアームリンク機構の一部を構成している。
(もっと読む)
医療用マニピュレータ

【課題】体腔内からのガスリークを可及的に抑制することができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、中空の連結シャフト18と、連結シャフト18内に挿通されるワイヤ80a及びロッド82aと、連結シャフト18の一端側に設けられ、ワイヤ80a及びロッド82aを軸線方向に進退駆動するプーリ70a及びトリガレバー36と、連結シャフト18の他端側に設けられ、ワイヤ80a及びロッド82aの進退駆動によって動作される先端動作部12と、ワイヤ80a及びロッド82aがそれぞれ摺動可能に挿通される複数の孔部110a〜110fが形成され、連結シャフト18の内面に対して密着配置されることにより、該連結シャフト18内を先端動作部12側とプーリ70a側とに仕切る気密シール100とを備え、複数の孔部110a〜110fのうち、少なくとも一部の孔部110a、110bの近傍には、ガイドパイプ116が配置されている。
(もっと読む)
ロボットの防塵構造およびそれを備えたロボット
【課題】産業用ロボットの内部で発生する粉塵の拡散を防止する。
【解決手段】ロボットのハンドを有する作業軸30およびその周辺から発生する塵の拡散を防止する防塵構造60であって、蛇腹部65と前記蛇腹部65の両端にストレート部66a,66bとを有し、前記蛇腹部65で前記作業軸30を覆う蛇腹ホース62と、前記ストレート部66a,66bが嵌合する接続部を有し、前記作業軸30の軸線に沿って所定の間隔を空けて配置された2つのホース固定部61,63とを備え、前記ホース固定部61,63では、弾性部材68,69を介してクランプ材70,71で前記蛇腹ホース62の前記ストレート部66a,66bを前記接続部に締め付けることによって固定する。前記ストレート部66a,66bは、前記クランプ材70,71による締め付けに対して浮きを低減させるため、ストレート部の円周方向に沿って複数形成された薄肉部からなる緩衝部を有している。
(もっと読む)
医療用マニピュレータ
【課題】体腔内からのガスリークを可及的に抑制することができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、中空の連結シャフト18と、連結シャフト18内に挿通されるワイヤ80a及びロッド82aと、連結シャフト18の一端側に設けられ、ワイヤ80a及びロッド82aを軸線方向に進退駆動するプーリ70a及びトリガレバー36と、連結シャフト18の他端側に設けられ、ワイヤ80a及びロッド82aの進退駆動によって動作される先端動作部12と、ワイヤ80a及びロッド82aがそれぞれ摺動可能に挿通される複数の孔部110a〜110fが形成され、連結シャフト18の内面に対して密着配置されることにより、該連結シャフト18内を先端動作部12側とプーリ70a側とに仕切る気密シール100とを備え、スリット124が形成された孔部の摺動部118と、スリット124が形成されていない孔部の摺動部112は、ワイヤ80a及びロッド82aの摺動方向での位置がずれている。
(もっと読む)
ロボット
【課題】X軸方向に水平に延びる直動レールに沿って移動される移動体を備えるものにあって、必要な可動範囲及び移動速度を確保しながらも、上下方向の小型化を図る。
【解決手段】移動体3を、X軸移動用モータ5の駆動により直動レール2に沿ってX軸方向に移動するように設け、移動体3の前面部に、旋回アーム9を、r軸用モータ10の駆動によりr軸を中心に旋回するように設ける。旋回アーム9の先端に、テレスコピック型の伸縮アームからなる直動アーム12を、Y軸移動用モータの駆動によりY軸(前後)方向に自在に移動(伸縮)するように設け、直動アーム12の筒状部14aの先端に、作業用ツールが装着される手首部11を、T軸を中心に同軸回転するように設ける。
(もっと読む)
水平多関節型ロボット
【課題】応答性能や位置決め精度を維持しつつ、その可動範囲を広く確保することのできる水平多関節型ロボットを提供する。
【解決手段】スカラロボットには、基台11に第1のアーム13の基端部を回動可能に支持する連結軸12が設けられ、その軸心C1を中心に第1のモータM1により正逆回転される。第1のアーム13の先端部には、第2のアーム15の基端部を支持させる支持軸14が連結されその軸心C2を中心に第2のモータM2により正逆回転される。第2のアーム15には先端部に軸心C3を有する主軸16が設けられている。第1のアーム13は軸心C1と軸心C2とを結ぶ中心線に対して偏心しており、左側面に右側に凹むかたちの凹部13dが形成され、すなわち右側に湾曲した形状に形成されている。軸心C2と軸心C3との距離は、軸心C1と軸心C2との距離よりも短いことから主軸16が凹部13dに入り込ませるかたちに配置させることができる。
(もっと読む)
ハンドリング機構及び成膜装置
【課題】被成膜物の反転作業の作業効率を向上させ、被成膜物に対して効率的に成膜すること。
【解決手段】減圧状態で被成膜物Hを一定方向側から成膜する成膜機構21が配置された成膜室2と、被成膜物を収容するために成膜室に隣接して連通可能に設けられた収容室3と、を備える成膜装置1に用いられる機構であって、被成膜物を把持及び把持解除する把持ハンド43と、該把持ハンドを、収容室から成膜室までの範囲で移動可能且つ把持姿勢を反転可能に支持するハンド支持部61と、収容室及び成膜室の外部に配置され、ハンド支持部を介して、収容室から成膜室までの範囲で把持ハンドを移動させるハンド移動部41と、収容室及び成膜室の外部に配置され、把持ハンドの把持姿勢を反転させる反転部44と、を備えるハンドリング機構4を提供する。
(もっと読む)
ロボット及び生産システム
【課題】ワーク搬送路に沿って並ぶ複数の工程エリアに夫々設けられたロボットにより、ワークに対して複数の作業工程を順に実行するものにあって、全体の小型化を図る。
【解決手段】ワークWが搬送されるワーク搬送路13に沿って、ワークWに対する作業を順に行うロボット12を備える複数個の作業ステーション14〜17を配置して生産システム11を構築する。ロボット12を、直線移動レール18の下面側に自在に移動される移動体の下面部にベースを連結し、そのベースの下面に水平旋回アーム21を垂直軸J1を中心に旋回するように取付け、水平旋回アーム21の先端面に昇降体を上下動するように取付け、この昇降体の下面側に手首部を垂直軸を中心に同軸回転するように取付け、手首部にワークWを把持するための作業用ツールを取付けて構成する。
(もっと読む)
ロボット及び生産システム
【課題】ロボットによる作業を行う生産システムにあって、全体をコンパクトに配置しながら、比較的低コストで構築することを可能とし、しかも人に対する安全性を高める。
【解決手段】ロボット12の直動軸を構成する直線移動レール13の片側に、ロボット12がワークWに対する作業を行う複数個の作業ステーション14〜16を配置して生産システム11を構築する。ロボット12を、直線移動レール13の下面側に自在に移動される移動体の下面部にベースを連結し、そのベースの下面に水平旋回アーム21の基端部を垂直軸J1を中心に旋回するように取付け、水平旋回アーム21の先端面に昇降体を上下動するように取付け、この昇降体の下面側に手首部を垂直軸J2を中心に同軸回転するように取付け、手首部にワークWを把持するための作業用ツールを取付けて構成する。
(もっと読む)
物体入れ換え装置および物体移動装置
【課題】同一平面内において物体の位置入れ換えを効率的に行って、複数の物体の任意位置への移動を可能とする。
【解決手段】移動機構ビーム5a,5bの交点に配されたスライダ19aに、回転軸7aを介して物体搭載部11aを持つ入れ換え機構13aを連結する。移動機構ビーム6a,6bの交点に配されたスライダ19bに、回転軸7bを介して物体搭載部11bを持つ入れ換え機構13bを連結する。スライダ19a,19bの移動により、物体12a,12bが移動する。入れ換え機構13a,13bは、凸型接続部9aと凹型接続部9bの嵌合により連結可能とされている。この連結状態で、物体搭載部支持機構10が、物体搭載部11a,11bを支持した状態で回転し、物体搭載部11a,11b、従って物体12a,12bの位置入れ換えを行う。入れ換え機構13a,13bの干渉による影響を受けずに、物体12a,12bを任意位置に移動できる。
(もっと読む)
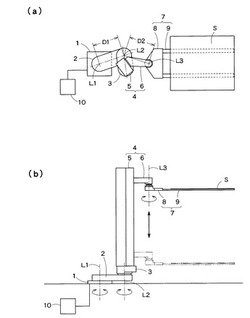
外観検査装置
【課題】単一の撮像手段により検査対象物の複数箇所の外観検査が可能で、小型化が図れる外観検査装置を提供する。
【解決手段】外観検査装置1は、チャック手段10によりチャックされたコネクタ6を撮像手段18により撮像し、画像処理により得られた画像データに基づいてコネクタ6の良否判定を行う。外観検査装置1は、所定の軸心L回りに回動操作自在に支持された回動アーム手段11と、回動アーム手段11に備えられると共に、軸心L上にセットされたコネクタ6をその軸心L方向両側からチャックするチャック手段10と、軸心Lと直交する撮像方向Mからコネクタ6を撮像する撮像手段18と、回動アーム手段11を撮像方向Mと平行な方向に沿ってスライド操作自在な電動スライダ装置12とを備える。
(もっと読む)
高速アプリケーション用多軸ロボット
【課題】位置決め精度を高めたベルト駆動設計の多軸ロボットを提供する。
【解決手段】互いに実質的に平行に配置されている第1ガイドレールと第2ガイドレール12,14とを具備する。第1端18および第2端20を有するクロスバー16が、ガイドレール12,14に作動可能に支持されている。第2運動軸66に沿って移動させるために、搬送台22が前記クロスバー16に作動可能に連結されている。第1および第2ドライブと、第1ベルト32とを有する第1駆動システムは、第1および第2運動軸66に沿った搬送台22の移動を提供する。第2および第3ベルト34,36は別々の第2および第3ベルト経路を走行し、第2および第3ベルト34,36の一方は右回りでクロスバー16に進入するとともに、左回りでクロスバー16から離れ、第2および第3ベルトの他方が左回りでクロスバー16に進入するとともに、右回りでクロスバー16から離れる。
(もっと読む)
マニピュレータおよびそれを複数備えたパワーアシスト装置
【課題】マニピュレータおよびそれを複数備えたパワーアシスト装置において、操作性の向上を図る。
【解決手段】パワーアシストアーム1は、動作部としての直動関節5と、回転関節6と、ハンド部8とを備えている。また、パワーアシストアーム1は、各動作部を操作する第1操作部11および第2操作部12と、直動関節5を駆動する直動関節駆動装置と、回転関節6を駆動する回転関節駆動装置と、ハンド部8を駆動するハンド部駆動装置とを備えている。第1操作部11はハンド部8から離れた位置にあり、第2操作部12はハンド部8に近接した位置に設置されている。パワーアシストアーム1は、直動関節5、回転関節6およびハンド部8の力覚を第1操作部11に提示する直動関節力覚提示装置、回転関節力覚提示装置およびハンド部力覚提示装置を備えている。
(もっと読む)
ロボット
【課題】把持部を上下動させるための機構を構成する部材のアームからの突出長さを短縮する。
【解決手段】把持部を配設する昇降部材5を、テレスコープ状の直線移動支持機構9の第2の単位可動部材15の下端部寄りに取り付ける。また、昇降用モータ19の回転を直線移動支持機構9の第1,第2の単位可動部材14,15を直線移動に変換させるための機構をラック・ピニオン機構20とし、そのピニオン22とラック23との接触伝導部分をアーム4の下端寄りに位置させる。
(もっと読む)
マニピュレータ
【課題】処置部の自由度が高いマニピュレータを一段と簡易な構成によって提供する。
【解決手段】処置対象に対して処置を行う処置部(作業部10)を先端に有する連結部40の長手方向に沿った方向に対して直交する回動軸16と、回動軸16回りに回動自在に支持され、回動軸16に対して直交する主軸部20bを有する主軸部材20と、回動軸16回りに回動自在に支持される歯車17と、回動軸16回りに回動自在に支持される歯車18と、歯車17と直交して噛み合い、回動軸16からオフセットした位置で主軸部20b回りに回動自在に支持される歯車22と、歯車18と直交して噛み合い、回動軸16からオフセットした位置で主軸部16回りに回動自在に支持される歯車23と、歯車22とともに回動する処置部材11と、歯車23とともに回動する処置部材12とを備える。
(もっと読む)
部品実装装置
【課題】加圧駆動手段による加圧制御と共に、該加圧駆動手段に電流を流すことなく、吸着ノズルの上下方向の動きを規制することにより、非加圧制御を実現する。
【解決手段】X軸駆動手段及びY軸駆動手段により平面方向に移動可能な搭載ヘッドが、部品を吸着保持する吸着ノズル20と、加圧駆動部8bをZ軸方向に進退動させ、該吸着ノズル20を同方向に移動させる加圧駆動手段8と、該加圧駆動手段を固定し支持する支持フレーム15と、該支持フレームをZ軸方向に進退動させ、前記加圧駆動手段8と一体で前記吸着ノズル20を同方向に移動させるZ軸駆動手段11と、前記吸着ノズル20に加わる接触荷重を検出する荷重検出手段16とを備え、前記加圧駆動部8の前記支持フレーム15に対するZ軸方向の進退動を、機械的に規制する加圧規制手段33を備えた。
(もっと読む)
付着式ピンセット用移載システム
【課題】付着式ピンセットに対して好適な新規の移載システムを提供する。
【解決手段】
微細部品を付着するための粘着材、この粘着材を先端に導くための導出パイプ、この導出パイプ先端に粘着材を送り出す手段、導出パイプ先端より突出及び後退して、付着した微細部品を離脱するスライドパイプからなる付着式ピンセット1を搭載するキャリア5と、このキャリア5を水平方向に走行案内する走行レール2,3と、キャリア5を上下方向に昇降案内する昇降レール4と、キャリア5を走行及び昇降レール2,3,4に沿って駆動する手段20,30,40と、スライドパイプを前進及び後退する手段とを備えた。
(もっと読む)
塗装ロボット
【課題】 駆動モータを防爆型のモータを必要とせず、しかも、モータ容量を低減化できるようにする。
【解決手段】 塗装ロボットの各軸を駆動するモータをベース部11に集中配置し、ベース部が設置される空間と、ロボット本体が設置され塗装工程を行う作業空間との間を仕切壁24で隔絶する。
(もっと読む)
吸着ノズルアウタのガタ検出装置
【課題】吸着ノズルの着脱を行うノズルアウタのガタ検出装置の提供。
【解決手段】実装機のヘッドユニットに昇降及び回動自在に設けられ、その内部に負圧供給路を有するノズルシャフト1と、ノズルシャフト1を上下動するZ軸モータ2と、ノズル下端に上下動可能に支持したノズルアウタ4と、常にはノズルアウタ4を下方に押圧する弾性体と、ノズルアウタ4の上下動によりノズルシャフト1の負圧供給路内に出没し、ノズルシャフトの負圧経路内に挿入される吸着ノズルに形成した溝部に嵌合することにより吸着ノズルの上下動を規制する嵌合部材と、実装機の所定位置に設けられ、少なくとも前記ノズルアウタ4の下面の一部と対向する歯部を形成したノズルガタ検出部とを備えた。
(もっと読む)
溶接ロボット
【課題】円筒材の溶接において、多間接ロボットの各々の間接を同時に動かして、溶接トーチの先端の速度および軌跡の制御を行う必要がなく、また、ポジショナーを使用することもなく、高速で高精度の円筒溶接を行う溶接ロボットを提供すること。
【解決手段】円筒材と円筒材との溶接または円筒材と平板との溶接を行う溶接ロボットにおいて、溶接トーチと、マニピュレータの先端に回動自在に備えられ上記溶接トーチを直線移動自在に滑動的に移動させるリニアガイド機構とを備えた溶接ロボット。
(もっと読む)
1 - 20 / 20
[ Back to top ]