
Fターム[3C007BT01]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | 手首軸 (426)
Fターム[3C007BT01]の下位に属するFターム
2軸手首 (85)
3軸手首 (135)
つれまわり防止機構を有するもの (8)
ハンドの向きを一定に保つもの (109)
Fターム[3C007BT01]に分類される特許
21 - 40 / 89
遠隔操作用把持工具
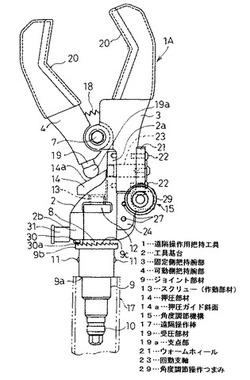
【課題】被把持物を把持しながらその遠隔操作棒の軸心方向に対する傾斜角度を容易に調節できる遠隔操作用把持工具を提供する。
【解決手段】遠隔操作棒17の先端に連結されるジョイント部材9を回転自在に保持する工具基台2に、固定側把持腕部3が回動支軸23により回動自在に支持され、固定側把持腕部3に可動側把持腕部4が回動自在に連結され傾斜した押圧ガイド斜面14aを有する押圧部材14を先端に備えた作動部材13がジョイント部材9の回転により工具基台2から可動側把持腕部4に対し接離方向に進退され且つ可動側把持腕部4に設けた受圧部材19の球状の支点部19aが回動支軸23の軸心とほぼ同一面上で押圧ガイド斜面14a上に当接され、固定側把持腕部3を手動操作で回動支軸23回りに回動したときに支点部19aが押圧ガイド斜面14a上で転動する状態で支点部19aを支点に可動側把持腕部4を回動させる角度調節機構15を備えている。
(もっと読む)
医療用マニピュレータ

【課題】医療用マニピュレータにおける先端動作部の動作角度を維持したまま、医療用マニピュレータの小型化を図る。
【解決手段】医療用マニピュレータ10は、進退動作するワイヤ56aと、ワイヤ56aに両端が接続された受動ワイヤ252aと、先端動作部12であるエンドエフェクタ104と、基端側から順に、伝達部材152と、該伝達部材152と一体化して形成された三日月形受動体155、及び折り返しプーリ350とを有する。受動ワイヤ252aが進退動作することによって、伝達部材152も進退動作することで、エンドエフェクタ104は動作する。三日月形受動体155は、進退動作に伴って折り返しプーリ350方向へ移動するが、折り返しプーリ350の基端側が、欠損部155cに入り込む。
(もっと読む)
電動ピンセット
【課題】 電動でピンセットの把持部を閉成状態で回転させると共に、該回転量及び開閉量を調整可能なこと。
【解決手段】 電動ピンセット1は、スイッチ33を動作すると、モータ31を第1方向へ回転してカムフォロワ55が並進移動してピンセット20が開放から閉成した後、スイッチ33を動作すると、モータ31を第1方向へ回転して伝達部70及び回転部80を回転してピンセット20を閉成状態で、ピンセット20の結合部22c及び端部21a,22aを回転させるものである。
(もっと読む)
ロボット及びその制御方法
【課題】ロボットの解体・点検作業を必要とするようなトラブルが発生する前に、ロボットの異常状態を検出すること。
【解決手段】本発明のロボットにおいては、ロボット制御手段40が、アーム駆動手段及び手首軸駆動手段を駆動してエンドエフェクタ25を所定の実位置に移動させ、エンドエフェクタ25が所定の実位置に到達した時点でのロボットアーム28の姿勢及び手首軸の角度位置を検出し、その検出結果に基づいて所定の実位置に対応する計測位置を算出して記憶し、異なる時点において取得された複数の計測位置の時系列データに基づいてロボットの状態を判定する。
(もっと読む)
産業用ロボット
【課題】動作速度の高速化などを図ることのできる産業用ロボットを提供する。
【解決手段】第1関節軸2を中空のボールねじスプラインシャフト12から形成すると共に、第1のアーム駆動用モータ8及び第2の作業軸駆動用モータ11を基台1内の固定ブラケット41に装着し、第2のアーム駆動用モータ9及び第1の作業軸駆動用モータ10を基台1内の可動ブラケット42に装着する。また、第2のアーム駆動用モータ9の回転トルクを第2関節軸4に伝える第1のプーリ軸27と第1の作業軸駆動用モータ10の回転トルクを作業軸6に伝える第2のプーリ軸34をボールねじスプラインシャフト12の内側に同軸に配置する。
(もっと読む)
ワーク保持位置姿勢計測システムおよびワーク搬送システム
【課題】
色やサイズ等が異なる多種多様な部品の保持状態を高精度に計測できるワーク保持位置姿勢計測装置を提供し、かつ、ワーク保持位置姿勢計測装置を利用した高精度なワーク搬送組立装置を提供する。
【解決手段】
マニピュレータは、ワーク保持手段、複数の基準マーカ、基準マーカ移動手段を備え、ワークに対応する対応基準マーカを決定する対応基準マーカ決定部、前記対応基準マーカを定められた位置に移動させる基準マーカ移動制御部、撮像手段を用いてマニピュレータに保持されたワークと前記対応基準マーカとを撮像したワーク保持画像を取得するワーク保持画像取得部、前記ワーク保持画像からワークの保持位置および姿勢を画像処理により求めるワーク保持位置姿勢演算部を備える。
(もっと読む)
多関節マニピュレータの先端位置制御方法および多関節マニピュレータ
【課題】多関節マニピュレータの先端を所定の位置に精度よく位置制御することのできる多関節マニピュレータの先端位置制御方法を提供する。
【解決手段】軸回りに回転する複数の関節軸2,4と、これらの関節軸2,4からその径方向に延伸する複数のアーム1,3とを備えた多関節マニピュレータ5の先端を位置制御する方法であって、アーム1,3の各先端部に装着されたジャイロセンサ9,10の出力から関節軸2,4の回転角度と回転速度を求めて多関節マニピュレータ5の先端を位置制御するようにした。
(もっと読む)
ロボット
【課題】ロボットアームに支柱を介してカメラを取付けるようにしたものにあって、カメラが障害物に衝突した場合における、カメラの破損等の不具合を極力防止する。
【解決手段】ロボットアームの第6アーム10の先端のフランジ面に、円柱状の支柱11を介してカメラ4を取付ける。支柱11の伸長方向の途中部分(上下方向中間部よりもやや上部寄り部位)に、支柱11の軸方向と交差(直交)する方向に延びる切欠き溝11bを設ける。支柱11に、切欠き溝11bを上下に跨ぐようにして、落下防止用のチェーン16を、緩みを有した状態で取付ける。チェーン16の長さ寸法は、カメラ4が宙吊り状態となっても、カメラ4のケーブル(コネクタまでの部分の長さ)が依然として緩みを有しているような寸法とされている。
(もっと読む)
可動装置およびその制御方法、可動装置の制御プログラム
【課題】本体の回転動作やアームの回転動作に伴って、通信を行うための光の経路が確保できないため、複数の回転軸を駆動するモータの制御を行うための光通信ができない。
【解決手段】動作命令によって動作する可動部としての回転部11に設けられた複数の第1の光通信部と、回転部11の周辺に設けられた第2の光通信部A,B,C,Dと、前記動作命令と現時点における回転部11の位置情報とに基づいて、前記現時点から経過後の複数の時点における通信可能な一つの第1の光通信部と一つの第2の光通信部との組み合わせの情報を作成する組み合わせ情報作成部と、前記複数の時点において、前記組み合わせのうち最も長く連続する一つの組み合わせを選択する選択部と、選択した前記一つの組み合わせにおける第2の光通信部を設定する設定部16と、を備えた可動装置としてのアーム型ロボット装置1を提供する。
(もっと読む)
搬送システム
【課題】車種に合わせたロボットのティーチングが不要となる搬送システムを提供すること。
【解決手段】搬送システムは、複数種類のワークW1…Wnを把持する把持ツール30と、把持ツール30の三次元空間内における位置及び姿勢を変更する多関節アーム13と、把持ツール30を多関節アーム13の先端側に対して少なくとも回転させる把持ツール支持機構40とを備える。また、多関節アーム13の先端側を開始位置から終了位置まで移動させるための、複数種類のワークに共通のアーム指令データ、及び、開始位置で複数種類のワークを把持するための、複数種類のワークのそれぞれに応じた把持ツール30の回転位相θ1…θnを含む把持ツール指令データを記憶する記憶部61と、これらアーム指令データ及び把持ツール指令データに基づいて、多関節アーム13、把持ツール30、及び把持ツール支持機構40を制御する制御信号出力部62と、を備える。
(もっと読む)
パラレルメカニズム
【課題】暴走時に原点体が損傷するのを解消でき、しかも駆動アームの作動範囲を大きくできるパラレルメカニズムを提供する。
【解決手段】複数の駆動アーム14およびロッド15と、操作ヘッドを備えている回転型のパラレルメカニズムにおいて、駆動アームの外面に基準突起26を設け、駆動アームの通常動作範囲の外に臨むベースの外面に、原点復帰操作された駆動アームの基準突起26を受け止める原点体27を設ける。基準突起26を受け止めるストッパー32を原点体27と同心状に設け、駆動アームが暴走する状態において基準突起26をストッパー32で受け止めて、原点体27を保護できるようにする。また、ストッパーと原点体との間にストッパーの変形を吸収する緩衝隙間を確保して、ストッパーが基準突起で塑性変形されるとき、基準突起から加えられる駆動トルクが原点体に作用するのを防止する。
(もっと読む)
パラレルメカニズム、およびその原点復帰方法
【課題】機械的な干渉を避けながら駆動アームを適正に原点復帰できる回転型のパラレルメカニズムを提供する。
【解決手段】複数の駆動アームおよびロッドと、操作ヘッドを備えている回転型のパラレルメカニズムにおいて、駆動アームの外面に基準突起を設け、駆動アームの通常動作範囲の外に臨むベースの外面に、原点復帰操作された駆動アームの基準突起を受け止める原点体を設ける。複数個の駆動アームを個別に原点復帰操作した状態において、駆動モーターからフィードバックされる位置信号を制御回路で受け取って、複数個の駆動アームの原点位置を個別に特定する。
(もっと読む)
パラレルメカニズム
【課題】使用時に樹脂ソケットが球体と同行変位するのを確実に防止して、操作ヘッドを常に適正に駆動操作できるパラレルメカニズムを提供する。
【解決手段】ベースに配置される複数個の駆動モーターと、駆動モーターで駆動操作される駆動アームおよびロッドと、ロッドで支持される1個の操作ヘッドとを備えている。ロッドの両端は、駆動アームおよび操作ヘッドに対してボール継手17で連結する。ボール継手17は、球体を備えたボール軸20と、ボール軸20に連結されるソケットロッド21と、樹脂ソケット22とからなる。球体の表面にダイヤモンド・ライク・カーボン処理を施し、樹脂ソケットをフッ素を含むポリアセタールで形成する。球体と樹脂ソケットとの間にグリース溜36を設け、フッ素系合成油とフッ素系樹脂で構成されたグリースで潤滑する。
(もっと読む)
パラレルメカニズム
【課題】パラレルメカニズムにおいて、モーターの出力軸および操作軸に対する駆動軸の着脱を簡便に行えるようにして、消耗しやすい駆動軸のメンテナンスや交換などの保守作業を簡便化する。
【解決手段】ベース2に配置される複数個の駆動モーター7と、駆動モーターで駆動操作されるアームユニットと、アームユニットで支持される操作ヘッド5と、ベースに設けたモーターの回転動力を操作ヘッドに設けた操作軸に伝動する駆動軸6とを有する。駆動軸6は、伸縮しながら回転動力を伝動できるボールスプライン軸22,23と、ボールスプライン軸の入力端および出力端のそれぞれに設けたユニバーサルジョイント21とで構成する。駆動軸の入力端および出力端のそれぞれを、モーターの出力軸および操作軸に対して摩擦締結具26,27を介して着脱可能に連結する。
(もっと読む)
パラレルメカニズム
【課題】 旋回軸に設けられている自在継手の磨耗を低減することが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1は、ベース部2に取り付けられた電動モータ21に一端が接続され、他端がエンドエフェクタ部13に接続され、電動モータ21の駆動力をエンドエフェクタ部13に伝達する旋回軸ロッド20を備える。旋回軸ロッド20は、その両端に、一対のヨーク24,25を十字軸26により連結したユニバーサルジョイント22,23を有する。十字軸26は、3本のピン27,28,29と、これらのピン27,28,29が十字状に嵌挿されるピン孔が形成されたコマ30を有し、十字軸26に加わるスラスト荷重を受けるスラストベアリング33,34が、ヨーク24,25とコマ30との間に挿入されている。
(もっと読む)
マニピュレータ制御装置及びマニピュレータ制御方法
【課題】作業者が注目している作業映像から目を離す必要がなく、また操作中のデバイスから手を離したり、別の手で補ったりすることなく、XYZの運動指令と同一の入力デバイスで、並進3自由度の他に、マニピュレータ先端の回転等を操作するマニピュレータ制御装置及びマニピュレータ制御方法を提供する。
【解決手段】駆動部5aと、駆動部5aにより回転可能な回転軸部5bと、回転軸部5bの先端に設けられ、各種作業を行う作業部51とを有するマニピュレータ5と、作業部51の直交する3方向の並進運動及び回転軸部5bの回転運動を指示する入力デバイス2と、入力デバイス2の指示した動作をマニピュレータ5に伝える制御部3と、を備え、入力デバイス2は、本体20と、本体20に対して回転及び傾倒可能な回転操作子23を有し、本体20は、平面内の移動に応じて、作業部51の直交する2方向の移動量を指示し、回転操作子23は、傾倒に応じて、回転軸部5bの回転を指示することを特徴とする。
(もっと読む)
試料作成装置および試料姿勢転換方法
【課題】 簡便に試料小片の姿勢を90度、180度、あるいは任意の角度だけ回転させて試料台に固定可能な装置を提供すること。
【解決手段】 試料7の表面とマニピュレータ回転軸2の交点を一端とする試料表面に垂直な線分をマニピュレータ回転軸2の周りに回転して得られる円錐側面と、試料表面の2つの面によってつくられる交線11に、試料小片の特定の方向を一致させた後、試料小片をマニピュレータで支持し、マニピュレータ回転軸2を動作させることを特徴とする試料作成装置。
(もっと読む)
水平多関節型ロボット
【課題】ロボットの防塵防水性を高めるとともに、ロボットのアームに作業性能を低下させない緩衝機構を有する水平多関節型ロボットを提供する。
【解決手段】水平多関節型ロボットは、基台に回動可能な回転軸に固着された水平方向に延びる第1のアームと、そのアーム先端の支持軸に回動可能に連結された第2のアーム15と、該アーム15先端の主軸筒15Aに上下方向に昇降するとともに、水平方向に回転する主軸とを備える。第2のアーム15は、剛性を有し電気回路等を配設される筐体20と、該筐体20を上方から側面まで覆うカバー21を有する。カバー21には、筐体20が旋回して移動する方向に向いている外側面20Aを覆うスカート部25が形成されている。スカート部25は、筐体20が物と接触する際には緩衝材となるともに、その下端から筐体20上面の天板まで長い距離があるため防水性や対塵性も確保できる。
(もっと読む)
ワーク搬送ロボットおよび搬送方法
【課題】 本発明は、ワーク搬送ロボットを大型化することなく、高速搬送を可能とするハンドリングロボットを提供するものである。
【解決手段】水平に回転可能な第1アーム10と、前記第1アーム10の先端に前記第1アーム10の回転軸と平行な軸に回転支持された回転可能な第2アーム17と、前記第2アーム17の先端部に前記第2アーム17の回転軸と平行な軸に回転可能なフランジ21と、前記フランジ21にワーク把持部25とを備えたワーク搬送ロボットにおいて、前記第1アーム10の回転軸と平行な前記軸に少なくとも2つの出力軸を備えた減速機構16,20を備えたものである。
(もっと読む)
ロボットのターゲット位置検出装置
【課題】 ターゲットの位置を高精度で検出することができるロボットのターゲット位置検出装置を提供する。
【解決手段】 ロボット22は、X軸、Y軸、Z軸の3軸方向に自由度を有するアーム32の先端部に、水平方向の自由度を有する手首が設けられ、この手首にはエンドエフェクタであるハンド33が設けられる。制御手段23は、教示点を記憶部26に記憶させ、この記憶部26に記憶させた教示点にハンド33が向かうように、ロボット22の動作を制御する。この制御手段23は、制御ループゲインを変化させて、ハンド33のターゲット46への押付け力を変更可能であって、少なくともターゲット46が存在する教示点近傍から、手首軸の制御ループゲインを所定値よりも低下させて、ハンド33をターゲット46に接触させ、ハンド33がターゲット46に接触した状態における位置を取り込んで、ターゲット46の位置を検出する。
(もっと読む)
21 - 40 / 89
[ Back to top ]