
Fターム[3C007BT01]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | 手首軸 (426)
Fターム[3C007BT01]の下位に属するFターム
2軸手首 (85)
3軸手首 (135)
つれまわり防止機構を有するもの (8)
ハンドの向きを一定に保つもの (109)
Fターム[3C007BT01]に分類される特許
61 - 80 / 89
平坦な物体を把持し搬送するためのグリッパ
平坦な物体(P)、特に新聞、雑誌、またはパンフレットなどの印刷物を保持し、かつしっかり保持した状態で搬送するためのグリッパを提供する。グリッパは、互いに対して旋回して開いた形状および閉じた形状となる2つの締付け舌(4、5)を含み、締付け舌(4、5)は、閉じた形状において互いに押付けられる。締付け舌(4,5)の少なくとも一方の遠位端は、締付け力と同じ方向に、締付け舌から横方向に延在する2本の弾性アーム(30)に嵌合し、締付けあご(10,11)は、アームの各々の自由端に配置される。少なくとも一方の締付け舌の締付けあごの接触面は、ボールジョイントによってアーム(30)上に装着されるように、締付け力の下で、向い合う締付けあごの接触面または締付けられた物体に嵌合するように適合される。グリッパは、種々の平坦な物体および厚さが異なる領域を有する平坦な物体を保持し、しっかり保持した状態で搬送するのに特に適する。 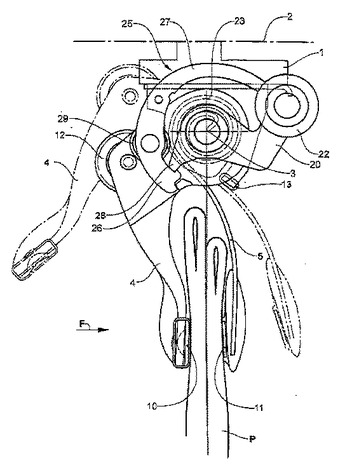 (もっと読む)
(もっと読む)
ロボット

【課題】剛性を高めることができ、ロボットの大型化やコストの高騰を抑制する。
【解決手段】ワーク12を把持するハンド装置5と、ハンド装置に連結され、ハンド装置を水平方向に移動させる水平移動機構6と、水平移動機構に連結され、ハンド装置を上下方向に移動させる上下移動機構7と、を備え、水平移動機構及び上下移動機構により、ハンド装置を水平方向及び上下方向に移動させて所定の場所に載置されたワークを把持して他の場所に搬送するロボット2において、水平移動機構は、水平方向に沿ってそれぞれ同方向に移動可能な一対の水平アーム31,32,33,34を有し、ハンド装置を、一方の水平アームに対して回転自在に固定するとともに、他方の水平アームに対して水平アームの移動方向に直交する水平方向にスライド移動可能とするスライド機構8を介して連結した。
(もっと読む)
無慣性タイプの荷重取扱装置

【課題】 重量の大きな荷重を負荷部に支持し、この荷重に作業者が手を添えてその荷重を移動させる場合においても、負荷部の昇降動作のほか、水平面内での2軸方向の動作をサーボ制御、好ましくは速度サーボ制御される駆動力(モータ出力)によって行うことにより、負荷による水平面内での移動に伴う慣性が前記作業者に作用する影響が殆んどないか乃至は影響を極力小さく抑制した、いわば無慣性バランサー乃至は無慣性タイプの荷重取扱装置を提供すること。
【解決手段】 平行リンク機構を含んだ関節形アーム機構AM1,AM2,AM3の先端側に負荷部5を設けた荷重取扱装置において、前記負荷部5の昇降駆動源と水平面内におけるX,Y軸方向の移動駆動源にサーボ制御されるモータなどによるサーボ制御駆動源を設け、前記負荷部5を前記駆動源のサーボ制御される出力を利用して昇降方向での移動と水平面内での移動をさせることにより、前記負荷部5を手で支える操作者に負荷の水平面内での移動による慣性を感じさせないようにしたこと。
(もっと読む)
関節構造体及びロボットアーム
【課題】関節の動きに完全に影響を受けず駆動力を伝達することが可能な関節機構における関節構造体及び該関節構造体を備えるロボットアームを提供する。
【解決手段】第1駆動装置4の駆動により、第2構造体2を第1回転関節回りに回転させ、第3回転ガイドプーリー33に対する、可動回転プーリー10及び第4回転ガイドプーリー34の、第1回転関節回りの回転及び平行リンク構造による回転抑制の結果、ワイヤ7が第3・第4回転ガイドプーリー円周部にかかる量の増減が相殺され、第3回転ガイドプーリーと可動回転プーリーとの距離を不変とする。
(もっと読む)
基板搬送装置、及び基板搬送システム
【課題】製造工程の効率化を図れる基板搬送装置を提供することにある。
【解決手段】処理チャンバ12にガラス基板Bを搬出入する転送ロボット20は、ベース部21に対して旋回可能に支持されたアーム部22と、ガラス基板Bを保持するテーブル部26を備え、アーム部26に対して回転機構25を介してテーブル部26が連結されている。回転機構25によりテーブル部26を回転させることにより、テーブル部26上に載置されるガラス基板Bの処理チャンバ12に対する搬入向きを変えることができる。これにより、特定の処理工程で不良が発生しているか否かを確認したいときに、処理チャンバ12に搬入されるガラス基板Bの向きを容易に変えることができる。したがって、不良発生工程を迅速かつ容易に特定することができ、製造工程の効率化を図ることができる。
(もっと読む)
パラレルメカニズム及びこれを備えた工作機械
【課題】構成部品の破損等の発生を防止することと、リンクヘッドの移動・回動動作として所望の移動・回動動作を得ることと、機構全体の小型化を図ることとを可能としたパラレルメカニズム及びこれを備えた工作機械を提供する。
【解決手段】リンクヘッド301の3自由度の回動及び移動の少なくとも一方の制御が可能なパラレルメカニズム300であって、リンクヘッド301を駆動するための4個のアクチュエータと、これら4個のアクチュエータにそれぞれ接続される4個のリンク350A,350B,351A,351Bを含み、リンクヘッド301に接続されるリンク集合体350,351とを備え、これらリンク集合体350,351とリンクヘッド301との間に介在する回転ジョイント355をリンクヘッド301に対して一軸線方向に相対移動可能に接続する直動ジョイント353とした。
(もっと読む)
産業用ロボットのアーム構造
【課題】産業用ロボットのアームにおいて、モータの回転を伝達し所望の個所を駆動させるロッドを短く、細くすることができるとともに、アーム全体容積を小さくでき、かつ組立も簡便にすることができる産業用ロボットのアーム構造を提供する
【解決手段】モータに接続されて回転し、先端に設けられた小歯車4を回転させるロッド21と、小歯車4と噛み合って回転し、アームの筐体1の先端に設けられた手首部を駆動する大歯車2、3とを設け、大歯車2、3には、同一の歯形状と同一の回転中心軸とを有する第1の大歯車2と第2の大歯車3とが重ね合わされて締結された構成であるとともに、そののフランジ面には、回転中心軸から略同一径上において、中心位置が相対的にオフセットした互いに異なる径の貫通穴を設けた。
(もっと読む)
部品装着方法
【課題】従来に比べて部品装着時間の短縮を図ることができる部品装着方法を提供する。
【解決手段】スプラインシャフト13の他端部13bにて空気通路27に接続される第1ブロー装置106にて上記空気通路内を大気圧状態に復帰させ、上記スプラインシャフトの一端部13aの近傍にて上記空気通路に接続される第2ブロー装置107にて上記空気通路内を大気圧状態に復帰させる。これにより上記空気通路内の真空圧を大気圧に復帰させるために要する時間を従来よりも短縮することができる。
(もっと読む)
要素を部品に締結するための締結工具及び方法
【課題】改善されたサイクル時間を達成することができる締結工具を提供すること。
【解決手段】要素(18)を保持するための保持装置(16)を有する、要素(18)を部品に締結するための締結工具(10)が開示され、この保持装置(16)は、保持された要素(18)を部品に締結するために、締結用駆動装置(20)によって締結工具ハウジング(12)に対して締結方向(22)に沿って移動させることができる。この工具において、締結工具ハウジング(12)(図1)の移動の際に、保持装置(16)を所定位置に保持するために、抑制手段(32)が設けられる。
(もっと読む)
産業用ロボット
【課題】アーム先端重量を軽量化してモータ容量の縮小化を図りかつモータや伝動機構のメンテナンス性を高めさらに部品コストの低減化を図る。
【解決手段】第1軸乃至第4軸駆動用モータからなるモータユニットを備えたベース部11と、第1軸を中心にベース部よりも下位にある水平面上を回動する第1アーム14と、第1アームの先端部で第2軸を中心に第1アームの下位にある水平面上を回動する第2アーム16とからなる水平アーム12と、ベース部と第1アームを連結する関節部に設けられる第1の減速機34と、第1アームと第2アームの関節部に設けられる第2の減速機35と、手首部20を上下方向に昇降させる第3軸たるボールねじ機構と、手首部を揺動させる第4軸たる揺動機構を具備する上下アーム18と、第1減速機と第2減速機の各々に同軸の多重中空軸ユニットとベルト伝動ユニットの組合せからなり、第2軸乃至第4軸の各軸に動力を伝動する伝動ユニットを具備する。
(もっと読む)
産業用ロボット
【課題】 多関節アームを駆動するとき負荷を低減し、モータ容量の縮小化を図り、省エネルギの産業用ロボットを提供する。
【解決手段】 ロボットの各制御軸を駆動するモータが集中配置されるベース部11を最上位の位置に配置し、ベース部11から水平多関節アーム12を垂設し、上下方向に移動自在な上下アーム18を水平多関節アーム12の先端部に設け、上下アーム18の下端部にエンドエフェクタ22を有する手首部20を設ける。
(もっと読む)
微小物体ハンドリングシステム
【課題】マイクロマニピュレータへのX軸及びY軸方向の駆動指令を誤っても、中断することなく操作を続行可能な微小物体ハンドリングシステムを提供する。
【解決手段】モニタの画面中心Oをエンドエフェクタの先端部の初期位置に設定し、顕微鏡の倍率と、画面中心Oから水平及び垂直画面端までの距離に相当するX方向及びY方向の初期位置からの実距離との関係を表す相関テーブルとから実距離(Xmax,Ymax)を演算し、初期位置から実距離(Xmax,Ymax)間を駆動するための駆動許容パルス数(PXmax,PYmax)を演算しておき、駆動許容パルス数(PXmax,PYmax)を越えるX及びY方向ステッピングモータへのパルスの出力を制限する。エンドエフェクタの先端部が画面の画像表示範囲を越えて駆動しない。
(もっと読む)
基板搬送装置
基板搬送装置は、フレーム、駆動部、及び関節アームを有している。かかる駆動部は、多数の異なる交換自在なモータモジュールから選択され、配置するのに選択自在な少なくとも1つのモータモジュールを有する。各モータモジュールは、異なる予め決められた特性を有している。関節アームは関節接続部を有している。アームは、関節結合のために、駆動部に接続されている。アームは、各々が予め決められた構造特性を有する多数の異なるアーム構造から選択自在な構造を有している。アーム構造の選択は、駆動部における配置のために、少なくとも1つのモータモジュールの選択によりなされる。  (もっと読む)
(もっと読む)
ロボットアーム
【課題】本発明は、分解・組立が容易でメンテナンス性に優れ、十分な動作領域と高い剛性を確保でき、各関節部等から粉塵等が侵入せず、簡便に作業が行えるロボットアームを提供する。
【解決手段】本発明は、塗装用スプレーガン4等を把持してそれを揺動や回転させる手首関節部45と、この手首関節部を揺動させる下腕部3と、この下腕部3を揺動させる上腕部2と、前記下腕部3の揺動軸である肘関節部46と、前記上腕部2の揺動軸である肩関節部57とを各々個別に分解組立自在なユニットとして構成する。
(もっと読む)
薄板状基板の搬送装置、及びその搬送制御方法
液晶表示パネル、ガラス基板等の薄板状基板を処理装置内に搬送する搬送装置に関し、大型の薄板状基板を搬送する回動アーム(16)を有する比較的大型のロボット(14)を備えた搬送装置において、2m程度の高さであっても安定して持ち上げることが可能であり、かつ回動アーム(16)を伸ばしたときの撓み量を補正した搬送が可能な搬送装置及び薄板状基板搬送システムを提供する。2つの直立支持体(12)に昇降可能に片持ち支持される水平支持台部(13)を設け、水平支持台部(13)に回動アーム(16)を有する搬送ロボット(14)を載置する。また、アームを伸ばしたときの撓み量は、水平支持台部(13)の高さを撓み量に応じて上げることにより補正する。撓み量は、水平支持台部(13)に載置されるロボット(14)の設置の角度を変化させることにより補正することも可能である。  (もっと読む)
(もっと読む)
多関節型ロボット
【課題】 大きな駆動力を発生する高価なモータを用いることなく、簡易な制御によって、半導体ウェハなどのワークを安定に搬送することが可能な多関節型ロボットを提供することにある。
【解決手段】 ワーク30をカセットにロード/アンロードする多関節型ロボット1において、ワーク30を保持するハンド部7と、ハンド部7を回転可能に保持するアーム部6と、アーム部6の基端側を回転可能に保持するとともに、アーム部6の基端側の移動軌跡が、ワーク30をロード/アンロードする方向とはほぼ直交する方向の直線となるように動作するリンク機構3と、アーム部6(又はアーム部6の先端側)を、リンク機構3の移動に整合させてワーク30をロード/アンロードする方向に直線補間するように移動させる駆動手段(アーム部モータ51や上支持フレームモータ6b)と、を備えることを特徴とする。
(もっと読む)
多関節ロボット
【課題】 2つの関節アームにて平面的な作業を有効的に行うことができる多関節ロボットを提供する。
【解決手段】 第1の関節アーム1および第2の関節アーム3が連接されて成り作業領域面A上の作業を行う多関節ロボットにおいて、第1の関節アーム1は一端1aに第1の関節アーム1を作業領域面Aにおいて水平方向に回転するために作業領域面Aにおいて鉛直方向にて成る第1の回転軸2を有し、第2の関節アーム3は第2の関節アーム3を作業領域面Aにおいて水平方向に回転するために作業領域面Aにおいて鉛直方向にて成る第2の回転軸4を介して第1の関節アーム1より作業領域面A側に配設され、作業領域面A上において第1の回転軸2を回転可能に保持する保持手段5を備え、第2の関節アーム3の回転移動半径R2は第1の関節アーム1の回転移動半径R1と同一長さにて成る。
(もっと読む)
ロボット機構
【課題】
外部から手動で動かすことができる受動状態と、動力でロボットを動かす能動状態とに切り換えられるようにする。
【解決手段】
第1クラッチ65によって、第1駆動系D1の駆動伝達経路を開放して、スライダ24のスライド移動及び第1リンク材42の回動運動が自由となる受動状態とすれば、人間の腕力等の外力よって、スライダ24、第1リンク材42及び第2リンク材46を動かすことができる。第1クラッチ65によって、第1駆動系D1の動力がスライダ24及び第1リンク材42に伝達される能動状態とすれば、第1モータ72によって、スライダ24、第1リンク材42及び第2リンク材46を動かし、作業を進めることができる。
(もっと読む)
複数の可動軸で工具を動かすための工具ヘッド
本発明は、工具(6)を動かすための工具ヘッドであって、工具(6)を直線回転運動可能とする複数の可動軸(2、4、5、8、11)と、軸を駆動するための複合駆動装置(10)とを有し、この複合駆動装置を利用して、複合駆動装置(10)によって駆動される軸(11)によって直線回転運動が実行可能である工具ヘッド、そして工具を動かすための工具ヘッドの軸(11)を駆動することへの複合駆動装置(10)の使用方法であって、複合駆動装置(10)によって駆動される軸(11)によって直線回転運動が実行可能である使用に関する。本発明は更に、運動案内するための方法に関する。本発明は、工具の高加速度の運動を可能とする工具ヘッドを提供する。  (もっと読む)
(もっと読む)
マイクロマニュピュレータ
【課題】顕微鏡視野内において微小物体を確実かつ迅速に把持することができるマイクロマニュピュレータを提供する。
【解決手段】マイクロマニュピュレータは微小物体を2本の把持指で把持するハンドリング機構104を備えている。ハンドリング機構104は、微小物体に接触するエンドエフェクタ505aを有し不動の固定指505と、微小物体に接触するエンドエフェクタ507aを有し支点軸を中心に回動可能な可動指507と、可動指507を支点軸を中心に回動させるアクチュエータ502と、を有している。可動指507がアクチュエータ502の駆動により回動することで固定指505のエンドエフェクタ505aの先端に可能指507のエンドエフェクタ507aの先端が接触可能に構成されている。
(もっと読む)
61 - 80 / 89
[ Back to top ]