
Fターム[3C007CY39]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 腕の作動範囲の拡大 (67)
Fターム[3C007CY39]に分類される特許
1 - 20 / 67
搬送ロボット
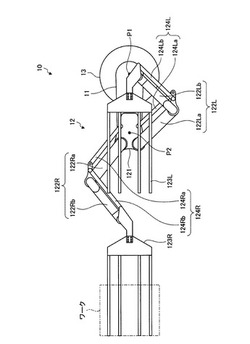
【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
関節装置

【課題】ロボットの関節装置において、第1連結部と第2連結部の相対回転角度を規制する機構を持ちながらも、360゜を超える相対回転角度を実現する。
【解決手段】第1連結部1と第2連結部2を軸受部を介して連結し、第1連結部1に設けられた第1ストッパーピン6と、第2連結部2に設けられた第2ストッパーピン8と、第2連結部2と同心でフリーに回転可能な中間リング7と、を備え、中間リング7は、第1ストッパーピン6に対して第1回転角度(θ1)だけ回転可能にする突出部7dと、第2ストッパーピン8に対して第2回転角度(θ2)だけ回転可能にする凹部7dと、を備え、突出部7dと凹部7eのいずれか一方により、それ以上の回転が規制された後も、突出部7dと凹部7eのいずれか他方により回転が規制されるまで、第1連結部1と第2連結部2の相対回転角度を最大で、(θ1+θ2)まで許容する。
(もっと読む)
関節駆動装置
【課題】人工筋肉アクチュエータを動力源とする筋骨格型ロボット等の関節駆動装置において、装置全体を大型化することなく、可動範囲の広範化及び所定の可動範囲での高出力化が可能な関節駆動装置を提供すること。
【解決手段】支持軸32に回転自在に支持されるプーリ4と、支持軸32に回動自在に支持されるリンク部6と、第1人工筋肉2a及び第2人工筋肉2bを有し、第1人工筋肉2a及び第2人工筋肉2bの拮抗筋運動による収縮量の差により、プーリ4を回転させる人工筋肉アクチュエータ2と、を備えた関節駆動装置1において、リンク部6の回転角度を検出する原点センサと、リンク部6をプーリ4に接続させて、回転駆動力を伝達する接続クラッチ7と、を備え、人工筋肉アクチュエータ2により所定の回転角度に回転されたプーリ4と所定の回動位置に位置するリンク部6とを接続して、リンク部6のプーリに対する相対的な回動範囲を切り替える。
(もっと読む)
ダブルアーム型ロボット
【課題】独立して2組の多関節アームの高さを変化可能なダブルアーム型ロボットを提供する。
【解決手段】第1及び第2の多関節アーム12、第1の多関節アーム11の一端が回動可能に連結される第1のアーム支持部16と、第2の多関節アーム12の一端が回動可能に連結される第2のアーム支持部17と、第1及び第2のアーム支持部17の第1及び第2の多関節アーム12と反対側の一端を鉛直方向に移動可能に保持しており、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12をそれぞれ回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12のハンド部23,33をそれぞれ回動させる第1及び第2の関節回動部と、第1及び第2のアーム支持部16,17を基柱14に対してそれぞれ独立して移動させる第1及び第2の上下駆動部とを備える。
(もっと読む)
溶接用ロボット
【課題】溶接用ロボットの姿勢を変更しても画像センサが邪魔にならないようにする。
【解決手段】溶接用ロボット1において、アーム部15の先端に手首部16を介して溶接ツール17を取り付ける。手首部16に移動手段26を取り付けると共に移動手段26を介して画像センサ25を取り付け、この移動手段26を、画像センサ25を溶接ツール17に対して移動させる構造とする。また、移動手段26を、画像センサ25を手首部16の軸芯に沿って移動させる構造とする。或いは、移動手段26を、画像センサ25を手首部16の軸芯回りに移動させる構造とする。移動手段26を、画像センサ25を手首部16の軸芯に対して垂直方向に移動させる構造とする。
(もっと読む)
吊り下げ型作業ロボット、及び、吊り下げ型作業ロボットシステム
【課題】回動するアームの先端部にハンドリング装置を備える作業ロボットにおいて、ハンドリング装置における有効作業エリアと可動エリアの同一化を図ることで、作業ロボットの設置スペースの狭小化を実現するとともに、特に、連続的に搬送されるワークについて作業を行う場合において、工程設計の自由度の高い新規な構成を提案する。
【解決手段】水平面内において互いに直行するX軸方向、Y軸方向に移動可能に設けられる第一アーム3と、第一アーム3に対し水平面内においてθ軸方向に回動可能に設けられる第二アーム4と、を有し、前記第二アーム4の先端部にハンドリング装置5が設けられ得る、作業ロボット1とする。
(もっと読む)
ロボット。
【課題】ウェハー搬送工程において、クリーン雰囲気維持、スループット低下、及びコスト増の問題を解決して、半導体製造におけるスループット向上、及び不良率低下とコスト削減出来るロボットを提供する。
【解決手段】四つのアーム構造体ロボットにより、アームによる走行方向動作を可能にする事で、走行におけるクリーン気流の乱れを最小限に抑えると共に走行レールを工程から省く事で簡素化を実現した。また、運動速度の高速化も可能にした。
(もっと読む)
回転角度検出装置、有関節構造体および態様取込装置
【課題】回転して角度が検出される可動領域を従来と比べて大きくすること。
【解決手段】軸支持部102aと軸支持部102aに直交する方向に延びる軸受部材102b,102cとを有する枠体101と軸支持部102aに支持され且つ軸支持部102aの面に対して凸上に延びる回転軸111と軸支持部102b,102cに支持され且つ軸支持部102b,102cの面に対して凸上に延びる回転軸122と回転軸111回りの回転角度を検出する回転角度検出部材113と回転軸121回りの回転角度を検出する回転角度検出部材122と回転角度検出部材113および回転角度検出部材122に電気的に接続され且つ枠体101に支持された基板114とを備えたことを特徴とする回転角度検出装置。
(もっと読む)
ロボット及びロボットシステム
【課題】可動範囲をより大きくしながらも、省スペース性能をより向上することができるようにした、ロボット及びロボットシステムを提供する。
【解決手段】基台10と、複数の関節により連結された複数の構造材からなるアームと、を有するロボット1であって、アームは、ある関節の回転軸と次の関節の回転軸との位置が所定方向にオフセットされるとともに、次の関節の回転軸と次々の関節の回転軸との位置が所定方向とは反対方向にオフセットされたオフセット部を有して構成する。
(もっと読む)
塗装システム
【課題】車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。このため、塗装ロボット14a〜14dとオープナーロボット16との間には、高低差が存在する。また、オープナーロボット16のアーム部40の先端には、柱状部の先端から互いに逆方向に分岐して延在する第1爪部及び第2爪部を有する略逆T字形状のフック48が設けられる。
(もっと読む)
パラレルリンクロボット
【課題】動作可能領域及び加減速性能を小さくすることなしに、自由度を高める。
【解決手段】パラレルリンクロボット10は、基礎部11と、可動部12と、基礎部と可動部とを連結していて基礎部に対してそれぞれ1自由度を有する三つのリンク部20a〜20cと、リンク部のそれぞれを駆動する三つのアクチュエータ13a〜13cとを具備し、リンク部のそれぞれは、基礎部に連結された駆動リンク21a〜21cと、駆動リンクと可動部とを連結していて互いに平行な二つの受動リンク22a〜22c、23a〜22cとからなっており、さらに、可動部に付属する要素19の姿勢を変更する姿勢変更機構部15、少なくとも一つのリンク部の二つの受動リンクの間においてこれら受動リンクに対して平行に配置された追加アクチュエータ13dなどと、追加アクチュエータから同軸に延びていて回転駆動力を姿勢変更機構部に伝達する動力伝達軸部39とを含む。
(もっと読む)
パラレルリンクステージおよび光学素子測定装置
【課題】パラレルリンクステージおよび光学素子測定装置において、パラレルリンク機構の並列方向に沿う可動部材の回転範囲を向上することができるとともに可動部材およびパラレルリンク機構によって囲まれる領域の中心部に開放空間を形成することができるようにする。
【解決手段】パラレルリンクステージ1は、回転軸線C回りに回転可能に支持された回転台部2と、回転台部2を回転軸線C回りに回転させるモータ10と、回転台部2と間隔をあけて配置される可動部材3と、回転台部2および可動部材3の間で回転軸線Cを取り囲むように周方向に間隔をあけて少なくとも3箇所で回転台部2および可動部材3を連結し、回転台部2に対する可動部材3の各連結距離を変化させるパラレルリンク機構4と、パラレルリンク機構4およびモータ10の動作制御を行うことにより、可動部材3の位置制御および姿勢制御を行う制御ユニット50と、を備える。
(もっと読む)
医療用マニピュレータ
【課題】医療用マニピュレータにおける先端動作部の動作角度を維持したまま、医療用マニピュレータの小型化を図る。
【解決手段】医療用マニピュレータ10は、進退動作するワイヤ56aと、ワイヤ56aに両端が接続された受動ワイヤ252aと、先端動作部12であるエンドエフェクタ104と、基端側から順に、伝達部材152と、該伝達部材152と一体化して形成された三日月形受動体155、及び折り返しプーリ350とを有する。受動ワイヤ252aが進退動作することによって、伝達部材152も進退動作することで、エンドエフェクタ104は動作する。三日月形受動体155は、進退動作に伴って折り返しプーリ350方向へ移動するが、折り返しプーリ350の基端側が、欠損部155cに入り込む。
(もっと読む)
多関節ロボットを備えたロボットシステム
【課題】ロボットの姿勢自由度を増しつつ、安価なロボットシステムを提供する。
【解決手段】ロボットシステム(1)は、ロボット基部(11)およびロボット基部に旋回可能に取付けられたアーム部分(12)を含む多関節ロボット(10)と、設置面に設置される設置部(21)および設置部に回転可能に取付けられた回転テーブル(22)を含む回転ユニット(20)と、アーム部分が旋回する旋回軸線と回転テーブルが回転する回転軸線とが非平行になるように、多関節ロボットのロボット基部と回転ユニットの回転テーブルとを連結する連結ユニット(30)と、多関節ロボットおよび回転ユニットを制御する制御ユニット(40)と、を具備する。
(もっと読む)
産業用ロボット
【課題】第1のアーム3や第2のアーム5の回動範囲を360°の範囲とすることのできる産業用ロボットを提供する。
【解決手段】第1の関節軸2、第2の関節軸4、作業軸6を中空に形成するとともに、第2のアーム駆動用モータ9の回転トルクを第2の関節軸4に伝える第1の中空プーリ軸25と第1のエンドエフェクタ駆動用モータ10の回転トルクを作業軸6に伝える第2の中空プーリ軸37を第1の関節軸2の内側に同軸に配置し、かつエンドエフェクタに空気を供給するための給気用環状空間とエンドエフェクタから空気を排気するための排気用環状空間とを第1の関節軸2と第2の中空プーリ軸37との間に同心円状に形成した。
(もっと読む)
多関節ロボット
【課題】エンドエフェクターの可動範囲の拡大が図れると共に、可動範囲を自由に変更で
きる多関節ロボットを提供すること。
【解決手段】ベース部10と、ベース部10に対して第1関節20によって回動自在に連
結される第1アーム30と、第1アーム30よりも短い長さであって第1アーム30に対
して第2関節40によって回動自在に連結される第2アーム50と、第2アーム50に装
着されるエンドエフェクター60とを有する。第1アーム30に、第1アーム30を屈曲
して所望の屈曲角度で固定する屈曲固定部35を設ける。屈曲固定部35は、第1アーム
30を構成する2本のアーム部材31,33同士を回動自在に連結している部分を締結具
で固定する構造である。
(もっと読む)
ワーク搬送装置
【課題】油飛散なく、高速に平行に直線的にワークを搬送することができるワーク搬送装置を提供する。
【解決手段】ワーク搬送装置10は、ロボット11と、ロボット11のアーム13の先端部に取り付けられ、ベルト21によって直線駆動されるキャリア29を有する直動機構20と、キャリア29に取り付けられたワーク把持機構23とを備える。
(もっと読む)
ウェーハ搬送ロボット及びウェーハ搬送装置
【課題】省スペース化と高スループット化を図ったウェーハ搬送ロボットを提供する。
【解決手段】昇降可能な支持台200と、支持台上に一端が軸支され水平方向に旋回可能な第1アーム部201と、その他端部上に一端が軸支され水平方向に旋回可能な第2アーム部202と、第1アーム内に設けられ、第1及び第2アームを旋回させアームの最大移動範囲内の任意の位置に停止させるアーム駆動機構221,222とで構成される水平多関節ロボット220と、第2アーム部の先端上に軸支され、水平方向に旋回可能な互いに対称的に配置された2つの機械式リンクアーム241,242と、その先端にそれぞれ設けられウェーハを保持するエンドエフェクタ208,209とを有する水平多関節機械式ダブルリンクアーム240とを備え、機械式リンクアームを旋回させる旋回機構が前記第2アームの内部に設けられ、エンドエフェクタは、互いに間隔をおいて上下に配置した。
(もっと読む)
遠隔作業装置
【課題】広範囲の作業も容易に行える遊泳移動型の遠隔作業装置が持つ作業性と、反力を伴う作業や正確な位置決めが必要となる作業も容易に行える設置型の遠隔作業装置が持つ作業性の下で、設備の予防保全作業を行える遠隔作業装置を提供すること。
【解決手段】本発明では、遠隔制御を受けて、発電プラントその他の設備の予防保全作業を行う遠隔作業装置において、作業具5を保持する先端作業部202とこの先端作業部202の位置決め操作を行う多関節のアーム部203とを有するロボットアーム2と、設備の構造間に架け渡される架橋体を成してロボットアーム2を支持し、この架け渡し方向を軸とする旋回方向、この架け渡し方向に沿う方向、この架け渡し方向の軸から遠ざかる方向およびこの軸に近づく方向の各方向にロボットアーム2を変位させるロボットアーム設置体3と、ロボットアーム2とロボットアーム設置体3とを着脱可能に連結するロボットアーム着脱機構4とを備えるようにした。
(もっと読む)
水平多関節型ロボット
【課題】応答性能や位置決め精度を維持しつつ、その可動範囲を広く確保することのできる水平多関節型ロボットを提供する。
【解決手段】スカラロボットには、基台11に第1のアーム13の基端部を回動可能に支持する連結軸12が設けられ、その軸心C1を中心に第1のモータM1により正逆回転される。第1のアーム13の先端部には、第2のアーム15の基端部を支持させる支持軸14が連結されその軸心C2を中心に第2のモータM2により正逆回転される。第2のアーム15には先端部に軸心C3を有する主軸16が設けられている。第1のアーム13は軸心C1と軸心C2とを結ぶ中心線に対して偏心しており、左側面に右側に凹むかたちの凹部13dが形成され、すなわち右側に湾曲した形状に形成されている。軸心C2と軸心C3との距離は、軸心C1と軸心C2との距離よりも短いことから主軸16が凹部13dに入り込ませるかたちに配置させることができる。
(もっと読む)
1 - 20 / 67
[ Back to top ]