
Fターム[3C007DS06]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 複数の挟持装置又は吸着装置 (152) | 直線配列型 (49)
Fターム[3C007DS06]に分類される特許
1 - 20 / 49
ピッチ変換移載装置
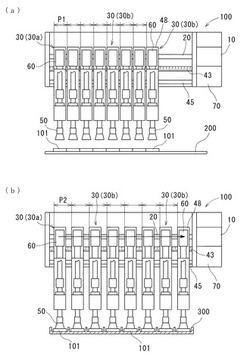
【課題】複数個のワーク間のピッチを変換して移載する際に、簡単な機構でワークを移載することができるピッチ変換移載装置を提供する。
【解決手段】駆動部10により回転させられるシャフト20と、シャフト20に沿って配列されワーク101を個々に保持する複数の搬送ヘッド30と、シャフト20の回転に伴ってシャフト20から伝達される回転運動を、その軸方向と平行な方向の直進運動に変換して、搬送ヘッド30のうちの少なくとも基準となる搬送ヘッド30を除く他の搬送ヘッド30をシャフト20に沿って移動する方向変換機構40とが設けられ、他の搬送ヘッド30には、シャフト20の回転を所定の伝達比で方向変換機構40に伝達する伝達機構44が備えられ、他の搬送ヘッド30の伝達機構44は、その伝達比が、搬送ヘッド30の列の基準となる搬送ヘッド30から離れるに従って漸次大きくなるように設定されている。
(もっと読む)
把持装置

【課題】従来に比して、より小型・軽量であって、ワークの把持動作に要する時間の短縮を図った把持装置を提供する。
【解決手段】把持される対象たるコネクティングロッド2を挟圧するための一対の挟圧部5・6を1組以上(本実施形態では4組)備えるとともに、1組以上の一対の挟圧部5・6を挟圧方向に向けて相対変位させるためのアクチュエータ7を備え、各挟圧部5・6の一対の挟圧部によりコネクティングロッド2を挟圧するときにコネクティングロッド2と当接する部位において、コネクティングロッド2の外形形状に倣った凹凸部が形成される一対の把持部8・9を備える、コネクティングロッド2を把持するための把持装置3であって、一対の把持部8・9のうち、一方の把持部9は、挟圧方向に向けて弾性変形する弾性部材10を介して、挟圧部6に支持される。
(もっと読む)
搬送装置及び搬送方法
【課題】等間隔に配列された複数のワークを、不等間隔に供給できる搬送装置を提供すること。
【解決手段】搬送装置1は、等間隔に配列された複数のワークWを把持して搬送し、任意の間隔で供給パレット7に供給し、ワークWを把持する第1把持部11、第2把持部12、第3把持部13及び第4把持部14と、これら第1把持部11〜第4把持部14が連接された把持基体部20と、を備え、把持基体部20は、第1把持部11〜第4把持部14をワークWの配列方向に相互に近接、離間させる第1摺動部210、第2摺動部220、第3摺動部230及び第4摺動部240を備え、第1把持部11〜第4把持部14は、それぞれ別個にワークWと係脱する第1係合部110a及び第2係合部110b、第1係合部120a及び第2係合部120b、第1係合部130a及び第2係合部130b、第1係合部140a及び第2係合部140bを備える。
(もっと読む)
搬送ハンド
【課題】中央部分が中空のワークであっても、確実に搬送できるとともに、設備を簡素化できる搬送ハンドを提供すること。
【解決手段】第1把持部11、第2把持部12、第3把持部13及び第4把持部14は、複数のバルブガイドWa又はバルブシートWbを把持して搬送し、略半円形状の外壁101aと略半円形状の内壁101bを有する一対の把持手段101と、一対の把持手段101を相互に近接又は離間させる押圧手段102と、を備え、これら一対の把持手段101は、押圧手段102により近接されることで内壁101bによってバルブガイドWaを把持し又は押圧手段102により離間されることで外壁101aによってバルブシートWbを把持し、複数のバルブガイドWa又はバルブシートWbの配列方向に沿って、複数連接されている。
(もっと読む)
把持装置、搬送システム、把持制御方法
【課題】把持した複数の物体のうち少なくとも1つを個別に開放する技術を提供する。
【解決手段】対向面にピン33を有し、弾力が加えられる複数のバネ爪31と、バネ爪31の対向面の間に設けられ、移動位置に応じてピン33のいずれかに当接することで一対のバネ爪31が把持しているコネクタ101を開放させるカムブロック41と、カムブロック41を垂直方向に移動させるブロック駆動部51と、一対の狭持板であって先部13がバネ爪31それぞれの間に挿入されるリジッド爪12と、リジッド爪12をバネ爪31の弾力方向に移動させる本体部11とを有する把持装置である。
(もっと読む)
ハンド装置及び多関節ロボット
【課題】ライナーのピッチを設備の段替え作業や段替え交換後の調整等を必要とすることなく簡単に変更できるようにする。
【解決手段】ハンド本体2に、筒状のライナー5を挿入保持可能なチャックユニット31を、所定のピッチで複数並設したハンド装置1において、ハンド本体2に、チャックユニット31を並設方向へそれぞれ直線移動可能に設けるスライド機構10と、チャックユニット31を所定の位置に位置決めする位置決め機構15とを設け、この位置決め機構15を、並設方向に配置されて、並設方向での中心を境にして互いに逆向きとなるネジ部16,16を有し、このネジ部16に螺合させた一対のナット部18にチャックユニット31をそれぞれ連結したボールネジ17で形成して、ボールネジ17の回転により、ナット部18と共にチャックユニット31を同時に相反方向へ直線移動させて、ピッチを変更可能とした。
(もっと読む)
ハンド装置及び多関節ロボット
【課題】ライナー径を変更しても、設備の段替え作業や段替え交換後の調整等を必要とすることなく簡単に変更できるハンド装置及び多関節ロボットを提供する。
【解決手段】
ハンド本体2に、筒状のライナー5を挿入保持可能なチャックユニット31を、所定のピッチで複数並設したハンド装置であって、チャックユニット31に、ライナー5の挿入保持位置に対してライナー5の半径方向へ移動可能で、ライナー中心側への移動によってライナー5の端部を外側からクランプする複数のスライドプレート34を設けて、このスライドプレート34におけるライナー5の端部との当接部位を、ライナー5の端部外周面に当接するクランプ35と、ライナー5の軸方向の端面に当接する円形凸部35aとからなる段部形状としたことにある。
(もっと読む)
把持装置と方法
【課題】互いの隙間を狭くして複数の対象物を配列した場合であっても、より容易に、対象物を挟んで把持できるようにする。
【解決手段】対象物1を挟んで把持する1対の把持爪3a、3bと、1対の把持爪を動作可能に支持して空間内を移動する支持移動体7とを備える。1対の把持爪は、支持移動体に対して往復動方向に駆動されることで、互いに近接して対象物を挟み、または、互いに離間して該対象物を解放するようになっている。往復動方向は、1対の把持爪3a、3bが対象物1を挟む方向に対して斜めの方向である。
(もっと読む)
把持装置と方法
【課題】一度に、複数の対象物を把持して搬送できるようにすることにある。
【解決手段】対象物1を挟んで把持する1対の把持爪3a、3bと、1対の把持爪を動作可能に支持して空間内を移動する支持移動体7と、を備える。1対の把持爪3a、3bは、支持移動体7に対して往復動方向に駆動されることで、互いに近接して対象物1を挟み、または、互いに離間して該対象物を解放するようになっている。さらに、1対の把持爪3a、3bの間に位置し、1対の把持爪が把持した対象物1を保持する保持機構8を備える。1対の把持爪3a、3bに把持された対象物1が、当該把持から解放されるように保持機構8内の奥側に移動させられて、当該奥側で保持機構8に保持され、この状態で、1対の把持爪3a、3bが、別の対象物1を把持できるように構成されている。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
ハンドリング装置およびハンドリング方法
【課題】
あるワークと挟持方向に弾性を有する他のワーク とを同時に挟持可能である軽量なハンドリング装置およびハンドリング方法を提供する。
【解決手段】
第1ワークと挟持方向に弾性を有する第2ワークとを挟持するハンドリング装置であって、連動された第1可動爪と第2可動爪と、対向配置された固定爪とを備え、第1可動爪と固定爪との間隔、および第2可動爪と固定爪との間隔とが、所定の条件を具備し、第1可動爪と固定爪とで第1ワークを挟持し、第2可動爪と固定爪とで第2ワークを挟持する。
(もっと読む)
ワークの自動積載方法及びその装置
【課題】サイクルタイムを短縮することができるワークの自動積載方法及びその装置を提供する。
【解決手段】先ず、初期位置からロボットヘッド20を第1プレートW1の上方に移動し、ロボットヘッド20に設けられた第1把持部42、42にて第1プレートW1を把持する。そして、ロボットヘッド20を第2プレートW2の上方に移動し、ロボットヘッド20に設けられた第2把持部54、54にて第2プレートW2を把持する。その後、第1プレートW1及び第2プレートW2を把持した状態でロボットヘッド20をトレー104に形成された凹部106の上方に移動し、第1プレートW1及び第2プレートW2の把持を解放することにより、第1プレートW1及び第2プレートW2を積載する。
(もっと読む)
チャック装置およびロボットアーム
【課題】ワークの搬送効率をより向上することができるチャック装置を提供すること。
【解決手段】チャック装置1は、チャック部10〜50を備える。チャック部10は、3つのチャック11を支持する支持板12が連結部材13によりギア14と連結されてなる。支持板12は、側板62にY方向に沿って上下に移動自在に支持されている。駆動側のギア82の回転によりギア87が回転すると、クランク機構である連結部材13により回転運動が直線運動に変換され、支持板12が上下に往復運動し、チャック11も上下に往復移動する。チャック部20〜50も同様である。チャック装置1は、隣り合うチャック部同士の往復方向における位置にずれが生じるように構成されている。例えば、チャック部20が前進すれば隣のチャック部10が後退する動作を行う。これにより隣り合うチャック部の間隔を広げなくてもチャックの数を増加してワークの搬送効率を向上できる。
(もっと読む)
パラレルロボット用ワークピッチ可変装置
【課題】 パラレルロボットにより処理されるワークのピッチを可変にするためのワークピッチ可変装置を提供する。
【解決手段】 各々の下端が連結部3に連結された複数のパラレルリンク対14、15、16によりワークWに対して処理を行うパラレルロボット1において、処理すべきワークWのピッチを可変にするためのワークピッチ可変装置4を構築する。この場合に、上下方向に延びる回転可能な回転軸40と、回転軸40の下端に連結され、水平方向に延びるレバーアーム41と、レバーアーム41の下方において水平面内の一方向に移動自在に設けられ、ワークWを吸着保持するための複数の吸着パッド50、51、60、61、70、71、80、81と、各吸着パッドとレバーアーム41との間をそれぞれ連結する複数の連結バー47A、48A、47B、48Bとを設ける。
(もっと読む)
ワーク把持装置およびワーク移送装置
【課題】直列に整列した複数の柱状のワークを確実に一括把持することが可能なワーク把持装置を提供する。
【解決手段】このワーク把持装置1は、一対のチャック10と、これらのチャック10の対向部位に互いに対面するように設けられる一対の板ばね部材20とを備えている。板ばね部材20は、チャック10に取付けられる取付け部21と、この取付け部21からそれぞれ延びて、ワーク101に接触することで互いに独立して側方へ撓み変形する複数のばね片22とを有する櫛歯状に形成されている。チャック10は、各ばね片22の先端部22aに接触して当該先端部22aの側方への変位を規制する突出部12と、各ばね片22の基部22bの側方への変位を許容する凹部11とを有している。複数のばね片22は、ワーク101の長さ方向に、各ワーク101にそれぞれ少なくとも1つのばね片22が接触するようなピッチdで設けられている。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチを変えるピッチ変更機構を備えている場合であっても、小型化することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットを構成する基板搭載機構3は、上下方向に重なるように配置され基板が搭載される搭載部13〜17間のピッチを変えるピッチ変更機構26と、上下方向に移動可能な複数の可動ハンド18〜21とを備えている。ピッチ変更機構26は、Y方向を軸方向として配置される支点軸に回動可能に支持され可動ハンド18〜21が連結されるレバー部材52、53と、レバー部材52、53を回動させる駆動機構58とを備え、可動ハンド18〜21とレバー部材52、53との連結部となるハンド連結部は、レバー部材52、53に取り付けられY方向に突出する突出部材と、可動ハンド18〜21に取り付けられ突出部材が係合する係合溝が形成されるガイド部材とを備えている。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチの変更動作を行う場合であっても、構成の簡素化が可能でかつハンドに搭載される基板を適切に把持することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットは、所定のピッチで上下方向に重なるように配置される基板の搭載部を有する複数のハンドと、搭載部間のピッチを変えるピッチ変更機構と、ハンドに搭載される基板を把持するための把持機構24とを備えている。把持機構24は、複数の基板の把持部80と、基板の把持方向へ把持部80を付勢する複数の付勢部材と、把持部80に当接して基板からの退避方向へ複数の把持部80を移動させる移動部材82とを備えている。複数の把持部80および複数の付勢部材のそれぞれは、複数のハンドのそれぞれに保持され、移動部材82は、把持部80が基板を把持しているときに把持部80から離れている。
(もっと読む)
ワーク搬送装置
【課題】輻射熱を受けやすい部材から効率よく熱を逃すことができるワーク搬送装置を提供する。
【解決手段】ワークを搬送するためのワーク搬送機構を備えたワーク搬送装置であって、ワーク搬送機構の外表面各所には、冷媒循環用の冷却パイプ84が付設されており、冷却パイプ84は、上記外表面に対して弾性部材85を挟んだ状態で固定具86を介して押圧固定されている。
(もっと読む)
物品整列システム及びロボットハンド
【課題】ロボットを備えた物品整列システムにおいて、表裏の区別を有する複数の物品を姿勢及び表裏を揃えて整列させるためのシステム構成を、簡素化する。
【解決手段】第1ロボット30は、第1及び第2表面S1、S2のいずれか一方を上向きにした不規則配置で供給された物品Wを、物品供給部12から取り上げて、物品仮置部14の第1及び第2仮置領域20、24の仮置箇所18、22に、第1表面S1を上向きにした第1姿勢の物品Wと、第2表面S2を上向きにした第2姿勢(第1姿勢の鏡像)の物品Wとの、二列に振り分けて配置する。第2ロボット32は、第1姿勢の物品Wと第2姿勢の物品Wとを物品仮置部14から取り上げて、互いに反対の第1及び第2方向α、βへ回転させることで、それら物品Wを、互いに同一姿勢でそれぞれの第1表面S1及び第2表面S2を互いに同一方向に向けた状態(すなわち規則的配置)に整列させる。
(もっと読む)
基板処理装置およびその方法ならびに基板搬送装置
【課題】基板の搬送時間を十分に短縮できる基板処理装置およびその方法ならびに基板搬送装置を提供する。
【解決手段】インデクサブロックおよび処理ブロックからなる基板処理装置において、インデクサブロックと処理ブロックとの間で、基板WがインデクサロボットIRにより搬送される。インデクサロボットIRは上下に並ぶように設けられた複数のハンド要素260を備える。ハンド要素260間の距離は、インデクサブロックに搬入される基板Wが収納されたキャリアの基板収納溝間の距離と等しい。また、インデクサブロックおよび処理ブロック間に設けられる基板載置部PASS2の上下に隣接する支持板51a間(および支持板52a間)の距離は、ハンド要素260間の距離の2倍である。
(もっと読む)
1 - 20 / 49
[ Back to top ]