
Fターム[3C007EV04]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352) | 曲面接触 (26)
Fターム[3C007EV04]に分類される特許
1 - 20 / 26
ロボット

【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を対象物が載置された載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
ワーク搬出入装置及び乾燥処理装置

【課題】ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供する。
【解決手段】操作部4と、荷重バランサー装置5と、を有し、操作部4は、エアレギュレータが搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。
(もっと読む)
クランパ、水室内作業装置およびクランプ方法
【課題】管材を安定的にクランプ保持できるクランパ、水室内作業装置およびクランプ方法を提供すること。
【解決手段】このクランパ23は、管板137に配置された管材132に挿入されて管材132をクランプする。また、クランパ23は、管板137あるいは管材132に当接可能な当接部2311bを有すると共に挿入部2311aを管材132に挿入して管材132をクランプするクランプ機構231と、クランプ機構231を挿入部2311aの挿入方向に昇降させる昇降機構232とを備えている。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
ロボットハンド
【課題】ワークの円筒形部分をその径方向に把持することができ、かつ円筒形部分に作用する把持時の面圧を低く抑えることができ、対応できる円筒形部分の直径の種類が限定されないロボットハンドを提供する。
【解決手段】複数のワークが円筒形部分5aを有し、円筒形部分の直径が所定の範囲内で最小値から最大値まで相違するワークの円筒形部分をその径方向に把持するロボットハンド。1対の爪12と、爪の根元に付属し爪の先端から根元までの直線方向を軸方向としてもつ回転軸と、爪を回転軸の軸心回りに回転駆動する回転駆動装置と、1対の回転軸を開位置と閉位置の間で開閉するチャック装置とを備える。1対の爪12は、閉位置において、互いに対向する位置に回転駆動により所定の範囲の直径を超えて連続的に変化する円弧溝13を周方向に有する。
(もっと読む)
チャッキング装置
【課題】異なる形状のワークに対してワンタッチで対応可能なチャッキング装置を提供する。
【解決手段】装置本体上に配設された、第一及び第二のチャック部材を有する第一支持部材並びに第三及び第四のチャック部材を有する第二支持部材と、両支持部材をY軸方向に相互に接近離間させてワークを把持、解除するよう駆動する把持駆動部材と、各チャック部材を第一の位置と第二の位置とに揺動変位させる変位駆動部材とを有し、各チャック部材がワークを把持するフィンガーを有し、第一の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に離間し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に接近し、第二の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に接近し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に離間する。
(もっと読む)
チャッキング装置
【課題】装置の上下寸法をコンパクトに抑えうる簡単な駆動力伝達機構を備えたチャッキング装置を提供する。
【解決手段】装置本体上に揺動可能に枢支され、四節リンク機構を構成する互いに平行な第一揺動レバー及び第二揺動レバーと、この四節リンク機構を構成し、両揺動レバーを揺動可能に連結する連結アームと、両揺動レバーを揺動駆動する送りネジ機構と、それぞれがチャック部材を備え、相互に接近離間することによりチャック部材同士が対象物を把持及び把持解除するように構成された第一及び第二の支持部材とを備えており、各揺動レバーにおける、四節リンクの対角の関節より外方の点においてそれぞれ対応する支持部材に連結されており、両揺動レバーが揺動することにより、支持部材同士が相互に接近離間するように構成されている。
(もっと読む)
結合部材及び工具並びにチャック爪
【課題】 一方部材を弾性変形させるだけで、他方部材を簡単かつ迅速に結合することができ、他方部材のみを取り外して簡単迅速に交換できるようにする。
【解決手段】 二つの部材を反復可能に結合してなる結合部材であって、一方部材1は、他方部材2を保持する嵌合保持部1aを有すると共に、嵌合保持部1a部分は外部からの加圧力によりその嵌合保持部1aを開く方向に弾性変形可能に構成する。他方部材2は、常時は嵌合保持部1aへの挿入が不能で、嵌合保持部1aを弾性変形により開いた状態でのみ嵌合保持部1aにスライド挿抜が可能となる嵌め合い形状の外周輪郭部2aを有する。一方部材を加圧力により嵌合保持部1aが開いた状態に弾性変形させた状態のもとで嵌合保持部1aに他方部材2をスライド挿入し、加圧力の解除による一方部材1の弾性復元力により嵌合保持部1aに他方部材2を結合するようにした。
(もっと読む)
部材把持装置、及び部材搬送装置
【課題】コンパクトな部材把持装置を提供する。
【解決手段】環状ベース40の周方向に複数の噛合チェーン式伸縮装置42を配置する。噛合チェーン式伸縮装置48は、一対の噛合チェーン58を備え、周方向から径方向への偏向駆動直後に相互に噛合って一体に自立状態で環状板44の中心軸に向かって移動すると共に、環状板44の径方向から周方向へ偏向駆動時に相互に噛み外れて分岐する。噛合チェーン58の端部には環状部材82に接触するパッド74を設ける。各噛合チェーン式伸縮装置42は、動力伝達チェーン78の回転により同期駆動され、全ての噛合チェーン58が環状ベース40の同一径方向に移動する。動力伝達系にリンクを用いていないので高い把持精度が得られる。分岐した噛合チェーン58は周方向に配置されたチェーン収納部70に収納されるので、径が大きくならずコンパクトにできる。
(もっと読む)
基板搬送装置及び基板処理装置
【課題】搬送中に基板の位置ずれを生じにくく、且つ、パーティクルの発生を抑制可能な基板搬送装置及びこれを備えた基板処理装置を提供する。
【解決手段】基板搬送装置は、基板Wを保持して水平方向に移動可能な保持部材10を備え、この保持部材10は基板Wの下面側の周縁部を保持するために基板Wの載置領域の周方向に沿って複数設けられ、垂直方向の断面が円弧状の凹曲面である保持面13、14を備えている。
(もっと読む)
物体を狭持する人工ハンドの指構造及び物体の人工ハンド狭持方法
【課題】様々な形状の物体、特に床面等に密着した紙等の薄い物ならびにクリップ等の小さく且つ端面が曲面である物を安定性良く把持することが可能で、簡単な構成要素の人工ハンドの指構造と人工ハンド狭持方法を提供すること。
【解決手段】二本の指の少なくとも一方の指を動かして平面に載置された物体を狭持する人工ハンドの指構造であって、前記一方の指1は、前記物体に当接される先端部に前記物体を掬い上げる凹曲面部12を持ち、他方の指2は、前記物体に当接される先端部に前記物体を押圧する凸曲面部22を持つ、ことを特徴とする。
(もっと読む)
把持装置
【課題】構造が単純で、容器の把持幅の変動を補正でき信頼性の高い把持装置を提供する。
【解決手段】少なくとも1本の軸線を中心に旋回自在に支持されており、一方の端部に把持構造部を有する2つの剛体把持アームGと、把持アームの間で動作する蓄力器20と、軸線を超えた他方の側における、把持アームの延長部分の把持アームクローズレバー3と、クローズレバーの間で回転するクローズカムNとを備え、少なくとも1つのクローズレバー3が、弾性変形両領域Bを介してクローズカムによって作動可能で、弾性変形領域がアームのセクション7であり、このアームが、クローズカムに対して作用し、把持アームとは構造的に個別で、把持アームと一緒に旋回運動するように把持アームに密着し、クローズレバーにおける止め部4とセクションとの間に、このセクションが少なくとも実質的に変形していない状態において所定の変形空間Zが設けられている。
(もっと読む)
ロボット、ロボットハンドおよびアタッチメント
【課題】 対象物の把持のための微妙な握力調整や位置決め精度を緩和したロボットハンドおよびアタッチメントを提供する。
【解決手段】 互いに接近および離間することによって開閉する一対の把持フィンガー7を備えており、ロボットハンド部6が保持しようとする対象物には、把持フィンガー7が把持するためのアタッチメント41が取り付けられており、前記一対の把持フィンガー7同士の対向する面7aそれぞれに対向する複数個の係止部材14が突設され、前記アタッチメント41の左右の両外表面それぞれに前記係止部材14が係止する複数個の被係止部41aが形成されている。
(もっと読む)
ロボット用把持ハンド
【課題】様々な形状および寸法の物品を安定把持できるロボット用把持ハンドを得る。
【解決手段】ロボット用把持ハンドは、物品を受け入れ得る開口部を持つベースと、ベース上で回転可能に支持され、中心軸心に沿って延びて中心軸心と同心のピッチ円上で互いに等角度離間して配置され、回転駆動される3つの回転軸と、回転軸に取り付けられて、解放位置あるいは間に物品を把持する把持位置に可動の把持指とを備え、回転軸および駆動装置が開口部に受け入れられる物品と干渉しない位置に配置されている。
【効果】様々な形状および寸法の物品を安定して把持できる。
(もっと読む)
ロボットハンド
【課題】掌方向への力を増大させ、把持対象物をつかむ圧力を減少させるロボットハンドを提供すこと。
【解決手段】ロボットハンド1は、指部の付け根側となる根本リンク121と、根本リンク121に接続された先端リンク122とを有する。そして先端リンク122は、把持対象物を把持する側の表面に第1領域A1及び第2領域A2を有しており、指先側の第1領域A1はその表面が略平らに形成されており、根本リンク側121の第2領域A2は内側が凹むように湾曲して形成されている。
(もっと読む)
昇降装置と被昇降体との連結構造
【課題】被昇降体の左右両外側で昇降する一対の昇降体に、被昇降体の各側部を連結する昇降装置と被昇降体との連結構造において、作業性を向上させると共に安定性を向上させる。
【解決手段】被昇降体1の各側部に設けられ各昇降体20の昇降アーム部20dを把持する把持手段3を、ベース枠30に揺動自在に連結された第1把持片31と、第1把持片31に揺動自在に連結された第2把持片32とで構成し、昇降アーム部20dと被昇降体1とが分離した状態で、第1把持片31が昇降アーム部20dの上下方向の投影空間の外方に位置すると共に、把持部32bが昇降アーム部20dの上下方向の投影空間内に位置し、昇降アーム部20dの上昇で昇降アーム部20dが第2把持片32を押し上げることにより、第1把持片31が第2把持片32を介して引き上げられて、把持部31aが下方から昇降アーム部20dに当接する。
(もっと読む)
把持装置
【課題】配線の断線等を引き起こすことなく、回転体に設けられた把持手段を開閉させることができる把持装置を提供する。
【解決手段】把持装置10は、テーブル12と、テーブル12の上部に配置された駆動装置本体14と、駆動装置本体14の側方で回転駆動されるターレット16と、を備えている。また、ターレット16の周面には、ワーク40を切削加工したときにワーク40に絡んだ切り粉を除去する切り粉除去装置18が設けられており、駆動装置本体14には、シリンダー20が設けられている。切り粉除去装置18が所定の位置に回転したときに、シリンダー20のロッド20Bが進出して切り粉除去装置18の移動部材122を移動させ、ハンド114A、114Bを開放させる。そして、ロッド20Bが後退して移動部材122から離れたときにハンド114A、114Bは閉止される。
(もっと読む)
弦楽器用マニピュレータ、及び弦楽器演奏ロボット
【課題】簡便にビブラート奏法を行なうことができる弦楽器用マニピュレータ、及びそれを用いた弦楽器演奏ロボットを提供すること。
【解決手段】本発明の一態様に係る弦楽器用マニピュレータは、弦51を指板52に押し当てる押し当て部材21と、押し当て部材21を保持する本体部20と、本体部20を指板52に対して近接離間させる左手用アクチュエータ13と、押し当て部材21を本体部20に対して回動可能に支持するシャフト22と、本体部20と押し当て部材21との間に設けられ、押し当て部材21を指板52に押し付ける方向に付勢するねじりばね26と、を備え、左手用アクチュエータ13が指板52を本体部20に対して近接離間させることによって、押し当て部材21が回動して弦方向の押し当て位置が変化するものである。
(もっと読む)
ロールを取り扱うロボット
ウェブ材料のロールを取り扱うロボットに関する。該ロボットは、多数の数値制御された軸線に従って可動でありしかも吸引ヘッド(61A)を支持する関節型アーム(60)を有する。 (もっと読む)
支持体へのツールの迅速な組み立てのための装置
ツールの支持体へのツールの迅速な組み立てのための装置であって、上記支持体に取り付けられて貫通孔部(10)を有するボア(14)内に配置されたボルト(15)と、マンドレル(12)と、を備え、マンドレル(12)は、ツールに取り付けられて上記貫通孔部(10)内に配置され、上記ボルトと接触する。ツールとその支持体との間の結合部において、装置は、ホゾ部(11)及びホゾ穴部(13)の組からなるセンタリング及びロック手段を備え、組は、マンドレル(12)に垂直に延在してこれにより組立体のT字状の構造体を形成し、構造体は、ツールに高い剛性を付与する。上記組立装置は、特にアクチュエータまたはプライヤ、すなわちフラスコ、ボトルまたは同様のものの梱包のための機会に使用されるツールのようなツールに適している。 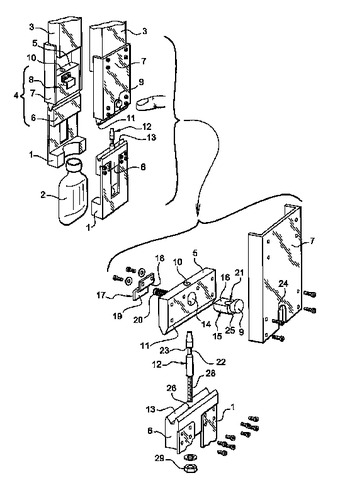 (もっと読む)
(もっと読む)
1 - 20 / 26
[ Back to top ]