
Fターム[3C007EV17]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 当接部の角度が可変であるもの (43)
Fターム[3C007EV17]の下位に属するFターム
Fターム[3C007EV17]に分類される特許
1 - 20 / 20
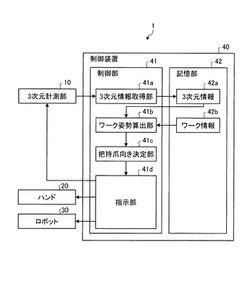
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
ロボットハンド及びロボット装置

【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされている。
(もっと読む)
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット
【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
ロボットハンド
【課題】駆動源が非常停止したときにワークを落下させることなくワークを保持できるロボットハンドを提供する。
【解決手段】一対の落下防止機構40L・40Rを具備し、一対の落下防止機構40L・40Rは、ワーク100を把持するときにワーク100に接触する把持カム41と、把持カム41を回動可能に支持する回転支点ピン42と、を備え、各把持カム41・41は、ワーク100を把持するときに、一対の駆動フィンガー30L・30Rをワーク100に近接させることにより、ワーク100に押圧され、各把持カム41・41には、ワーク100を把持している状態で、ワーク100の自重によりワーク100へ近接する方向B1・B2への回動力が加えられ、把持カム41にワーク100へ近接する方向B1・B2への回動力が加えられることにより、把持カム41によるワーク100に対する押圧力が増加する。
(もっと読む)
リンク式クランプ
【課題】ワークの種類によって当該ワークの被固定部の把持幅の中心線の位置が変化する場合でもリンク式クランプを利用できるようにする。
【解決手段】ハウジング2内にピストン10を挿入し、そのピストン10と上記ハウジング2との間に支持部材14を挿入する。その支持部材14を押上げ機構Pによって所定の力で上方へ押す。上記の支持部材14に取り付けたリンク機構30に、ワークWの被固定部31を両側から把持するための一対の把持リンク32を設ける。上記ピストン10の筒孔10aに所定の遊動隙間36をあけて出力ロッド37を挿入する。その出力ロッド37の出力部48を上記の把持リンク32の入力部32aに連結し、上記の出力ロッド37の入力部38を上記ピストン10の出力部41に揺動可能に連結する。
(もっと読む)
アクチュエータ及び把持装置
【課題】構造が簡単で製造コストが安価であり、狭い場所にも適用可能な把持装置を提供すること。
【解決手段】1対の把持指の各々について、少なくとも端部が重なるように配置し連結された2枚以上の金属薄板1と、この連結側端部6の反対側端部において金属薄板を金属薄板の長さ方向に対して垂直に往復動させ、把持指の連結側端部を、応力作用により揺動動作させる手段を設けること特徴とする。この揺動動作により、把持対象物を抱き込み、確実に把持できる。
(もっと読む)
ガラス基板搬送用ロボットハンド
【課題】安価でメンテナンスが容易なガラス基板搬送用ロボットハンドを提供する。
【解決手段】櫛歯状の本体に平面状にガラス基板保持部を配置し、ガラス基板保持部上にガラス基板を載置してガラス基板を搬送するロボットハンドにおいて、ガラス基板保持部にOリングの半径方向をガラス基板と垂直になるようにOリングを配置し、Oリングを円周方向に回転させる回転機構と、Oリングを回転させた位置で固定する固定機構とを有し、Oリングの外周面をガラス基板と接触させてガラス基板とOリングの外周面の間の摩擦力によりガラス基板を保持して搬送することを特徴とするガラス基板搬送用ロボットハンド。
(もっと読む)
基板搬送装置、基板検査装置、及び、基板搬送方法
【課題】基板搬送装置、基板検査装置及び基板搬送方法において、基板との不要な接触を防ぐ。
【解決手段】ウエハ搬送装置1は、ウエハWが載置されるウエハ載置面2a,3aを有し互いに平行に設置された2本のアーム部2,3と、ウエハ載置面2a,3a(アーム部2,3)をアーム部2,3の長手方向を回動軸A2,A3として水平面に対し傾斜させる傾斜手段としてのバランサ(錘)4,5と、アーム支持部6と、吸引用チューブとしてのアーム側吸引用チューブ7,8と、支持部側吸引用チューブ9と、傾き検出手段としての透過型センサ10,11と、を備える。
(もっと読む)
搬送装置、搬送方法、露光装置、及びデバイス製造方法
【課題】載置ずれや変形を生じさせることなく、基板保持部に基板を受け渡すこと。
【解決手段】基板Pを保持する基板保持部としてのプレートホルダ9に基板Pを搬送する搬送装置は、基板Pを支持する支持装置としての搬送ハンド12と、搬送ハンド12を駆動し、プレートホルダ9からの搬送ハンド12の一部の高さと他部の高さとを相対的に変化させ、かつその一部の高さ及び他部の高さを減少させて、搬送ハンド12が支持する基板Pをプレートホルダ9に受け渡す駆動装置13,14と、を備える。
(もっと読む)
把持機構
【課題】種々の形状の把持対象物体を安定して把持することが可能な小型軽量な把持機構を提供することにある。
【解決手段】把持機構10では、第2の指リンク12は第1の指リンク11の一方先端にて第1の軸線A1周りに回転可能であり、第1の指リンクは第1の軸線に直交する第2の軸線A2に沿って相互に開閉運動が可能である。これにより、第2の指リンクを互いに逆方向に回転させつつ、第1の指リンクを互いに逆方向に開閉させることにより、第2の指リンクの周面を把持対象物体の表面に沿わせることができ、一対の第2の指リンクにより把持対象物体を把持・解放することができる。このため、把持可能な把持対象物体の形状が限定されることはなく、特に円盤状の把持対象物体を安定して把持できる。更に、指リンク自体は必要最小限の大きさで良いため、機構そのものの質量の増大を抑えて軽量化することができ、搭載する駆動手段や機構部材を小型化できる。
(もっと読む)
弦楽器用マニピュレータ、及び弦楽器演奏ロボット
【課題】簡便にビブラート奏法を行なうことができる弦楽器用マニピュレータ、及びそれを用いた弦楽器演奏ロボットを提供すること。
【解決手段】本発明の一態様に係る弦楽器用マニピュレータは、弦51を指板52に押し当てる押し当て部材21と、押し当て部材21を保持する本体部20と、本体部20を指板52に対して近接離間させる左手用アクチュエータ13と、押し当て部材21を本体部20に対して回動可能に支持するシャフト22と、本体部20と押し当て部材21との間に設けられ、押し当て部材21を指板52に押し付ける方向に付勢するねじりばね26と、を備え、左手用アクチュエータ13が指板52を本体部20に対して近接離間させることによって、押し当て部材21が回動して弦方向の押し当て位置が変化するものである。
(もっと読む)
ロボットハンド
【課題】把持又は押圧する物体の表面形状に合わせて追従することで、物体に十分な把持力又は押圧力を付与することを可能とする。
【解決手段】指部10の第1指部11に形成された凹所63の底部に、第1指部11の軸方向に並んで配されたコイルバネ77を介して押え部65を接続する。押え部65が物体200に把持力又は押圧力を付与する場合、押え部65が物体200の形状に追従できるように、指腹部65と第1指部11との間には、隙間を設ける。
(もっと読む)
ロボットハンド
【課題】 形状が異なるワークを確実に把持可能なロボットハンドを提供する。
【解決手段】 ロボットハンド14は、本体40と、一対のフィンガー41、43と、パッド76、91、115、116と、付勢手段を備えている。パッド76、91、115、116は、一端がフィンガー41、43に対して全方向に傾斜可能に取り付けられているとともに他端にワークと接触するための接触面が形成されている。付勢手段は、パッド76、91、115、116をフィンガーに対して所定の姿勢に付勢する。一対のフィンガー41、43は、相互に接近する側に回動することによってパッド76、91、115、116を介してワークを把持し、その把持している状態では、パッド76、91、115、116が付勢手段の付勢力に抗して傾斜することによって接触面がワークに倣う。
(もっと読む)
ロボットと干渉判別方法と干渉判別装置
【課題】 ロボットのロボットハンドと周辺物体との干渉の有無を判別する技術を実現する。
【解決手段】 ロボット10は、アームリンク12と、ロボットハンド14と、カメラ18と、画像処理手段17と、ワーク位置演算手段と、移動経路演算手段と、移動空間演算手段と、判別手段とを備えている。ワーク位置演算手段は、カメラ18が撮影したワークの画像を画像処理手段17で画像処理した結果から、ワークの位置と姿勢を演算する。移動経路演算手段は、ワークの位置と姿勢から、ロボットハンド14の移動経路を演算する。移動空間演算手段は、ロボットハンド14を包含する形状が移動経路に沿って移動する結果得られるロボットハンド14の移動空間の形状と位置を演算する。判別手段は、ロボットハンド14の移動空間の形状と位置と、周辺物体が存在する空間の形状と位置を比較し、両者の干渉の有無を判別する。
(もっと読む)
ロボットハンド
【課題】 簡単な構成で種々の形状のワークに汎用的に対応することができるロボットハンドを実現する。
【解決手段】 ロボットハンド14は、本体40と、本体40に接続されていて本体40に対して回動する下回動部43、44と、本体40に接続されていて本体40に対して回動する内側部と、その内側部に接続されていて内側部に対して回動する外側部46、89を持つ上回動部41、42を1対備えている。下回動部43、44と内側部は、回動して接近することによってワークを把持する。外側部46、89は、下回動部43、44と内側部がワークを把持している状態で、回動して下回動部43、44に接近することによって、下回動部43、44との間で前記ワークを把持する。
(もっと読む)
基板把持機構
【課題】駆動源を必要とせず、単純な構成でシリコンウェハ等の基板を適切に把持する基板把持機構の提供。
【解決手段】開放端部において把持部材11のそれぞれを支持するアーム部21を有し、把持部材11を基板100の中心軸回りに一体的に回転させる回転機構20と、基板100の中心軸を中心とする環状を呈するリング8と、アーム部21にリング8をフローティングマウントするフローティングマウント機構311と、一端部にリング押え311bを支持し、アーム部21の開放端部に揺動自在に支持された揺動部材312を有し、リング8に発生する慣性力を、把持部材11の回転を開始又は停止する際に揺動部材312の他端部を基板100の端縁から中心軸に向かう方向に揺動させる揺動力に変換する伝達機構31と、を備える。
(もっと読む)
ワーク保持装置
【課題】複数のワークの種類に対応してワークを適切に保持することができるワーク保持装置を提供することにある。
【解決手段】ワーク保持装置11は、相対的に接近方向及び離間方向に移動可能な一対のベース部25、36と、一対のベース部25、36に各々設けられ、ワークWを間に介して互いに対向するクランプ面23a、23b、33a、33bを有した一対のクランパ23、33と、各ベース部25、36と該ベース部に対応するクランパ23、33との間に各々介在されて、クランパ23、33のクランプ面23a、23b、33a、33bと同一平面H1、H2上にクランパ23、33の回転中心軸線C1、C2が延在し、その回転中心軸線C1、C2を中心としてクランパ23、33をベース部25、26に回動自在に支持するガイド部41、51とを有する。
(もっと読む)
軸受け機構及びこの軸受け機構を用いたワーククランプ装置
【課題】 任意の位置で回転体を高精度に停止させてロックさせることのできる軸受け機構を提供する。
【解決手段】 円盤形状の回転体1と、軸受け2を介して前記回転体1を回転自在にガイドするガイド部材3と、前記回転体1に設けられ、エアーの導入によりブレーキ部材14をスライドさせて前記ガイド部材3に形成されたブレーキ当接面12に押し付け、前記回転体1の回転をロックする回転ロック手段4とを備える。回転体1をロックするには、エアーを導入してブレーキ部材14をブレーキ当接面12に押し付け、回転体1をアンロックするには、エアーの導入を停止してブレーキ部材14をブレーキ当接面12から離す。
(もっと読む)
ロボットハンド
【課題】 本発明の目的は、把持対象物を壊してしまうことなく、より確実かつ安定して対象物を把持することの可能なロボットハンドを提供することにある。
【解決手段】 本発明のロボットハンドは、複数のリンク2とリンク2同士を連結する関節部1とを備えて構成された多関節の指Fを持つもので、各関節部1の屈曲内側に関節部1を覆うように弾性体3を備えている。この弾性体3は、その両端が関節部1をまたいでリンク2の屈曲内側表面に取り付けられると共に、その中央部が指Fに固定されていない。この中央部は、関節部1の屈曲に伴って屈曲内側に突出する。対象物を把持する際に指Fを曲げると、各弾性体の中央部がたわんで対象物の表面に押圧される。この結果、対象物は弾性体3によって押圧されて安定して把持される。弾性体3が程良く変形するため、把持に必要な押圧力を確保しつつも、対象物を握り潰してしまうようなことがない。
(もっと読む)
1 - 20 / 20
[ Back to top ]