
Fターム[3C007EV24]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 付加機能を有するもの (310) | 一対の挟持部に複数組の当接部 (53)
Fターム[3C007EV24]に分類される特許
1 - 20 / 53
ロボットハンド
【課題】指部材を平行移動させる方式で狭い作業スペースでの作業に適用可能なロボット
ハンドを提供する。
【解決手段】対象物を把持する指部材を移動部材から立設し、掌部材に設けられた移動機
構によって移動部材を所定軸方向に移動させることで指部材を移動させて対象物を把持す
る。移動部材を所定軸方向に移動させるためのガイド部材を移動部材から立設させ、ガイ
ド部材を掌部材に対して摺動させることによってガイドする。こうすれば、指部材の間隔
を狭める(移動部材を掌部材に近づける)と、ガイド部材は掌部材に対して摺動しながら
移動部材の移動とともに移動するので、ロボットハンドが小さくなる。このため、指部材
を平行移動させる方式のロボットハンドでありながら、狭い作業スペースで小さな対象物
を把持する作業にも適用することが可能となる。
(もっと読む)
位置決め装置およびロボットハンド

【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
ロボットハンド
【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
把持装置
【課題】従来に比して、より小型・軽量であって、ワークの把持動作に要する時間の短縮を図った把持装置を提供する。
【解決手段】把持される対象たるコネクティングロッド2を挟圧するための一対の挟圧部5・6を1組以上(本実施形態では4組)備えるとともに、1組以上の一対の挟圧部5・6を挟圧方向に向けて相対変位させるためのアクチュエータ7を備え、各挟圧部5・6の一対の挟圧部によりコネクティングロッド2を挟圧するときにコネクティングロッド2と当接する部位において、コネクティングロッド2の外形形状に倣った凹凸部が形成される一対の把持部8・9を備える、コネクティングロッド2を把持するための把持装置3であって、一対の把持部8・9のうち、一方の把持部9は、挟圧方向に向けて弾性変形する弾性部材10を介して、挟圧部6に支持される。
(もっと読む)
把持ハンド、及び搬送装置
【課題】粘着性を有する物質の付着が低減された把持ハンド、及びその把持ハンドを用いた搬送装置を提供することを目的とする。
【解決手段】被把持部材を挟んで把持するハンド部において、ハンド部の少なくとも被把持部材に接触する部分が、基材21と、多孔質層22と、非粘着層23とで構成される。基材21は、粗面処理され、表面に凹凸形状が形成されている。多孔質層22は、基材21の粗面側に形成された複数の微細孔を有する。非粘着層23は、多孔質層22の表面に形成されている。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】互いに隣接しつつこの隣接する方向に対して交差する方向にずれた位置にある複数のワークであっても容易に把持できるようにする。
【解決手段】ワーク把持装置1は、4つのワーク把持ユニット5,7,9,11により4つの部品13,15,17,19をそれぞれ個別に把持する。部品13,15の上に部品17,19が載せられる。部品13,15を把持するワーク把持ユニット5,7は、上下シリンダ27,27Aを備えており、下端のアーム37,37Aが把持フレーム3に対して上下動可能である。4つのワーク把持ユニット5,7,9,11で4つの部品13,15,17,19を把持した状態で、ワーク把持装置1全体を上昇させると、上下シリンダ27,27Aが伸長して部品13,15が部品17,19に対して下方に離間した位置関係となる。
(もっと読む)
ハンド装置及び多関節ロボット
【課題】ライナー径を変更しても、設備の段替え作業や段替え交換後の調整等を必要とすることなく簡単に変更できるハンド装置及び多関節ロボットを提供する。
【解決手段】
ハンド本体2に、筒状のライナー5を挿入保持可能なチャックユニット31を、所定のピッチで複数並設したハンド装置であって、チャックユニット31に、ライナー5の挿入保持位置に対してライナー5の半径方向へ移動可能で、ライナー中心側への移動によってライナー5の端部を外側からクランプする複数のスライドプレート34を設けて、このスライドプレート34におけるライナー5の端部との当接部位を、ライナー5の端部外周面に当接するクランプ35と、ライナー5の軸方向の端面に当接する円形凸部35aとからなる段部形状としたことにある。
(もっと読む)
ハンド装置及び多関節ロボット
【課題】ライナーのピッチを設備の段替え作業や段替え交換後の調整等を必要とすることなく簡単に変更できるようにする。
【解決手段】ハンド本体2に、筒状のライナー5を挿入保持可能なチャックユニット31を、所定のピッチで複数並設したハンド装置1において、ハンド本体2に、チャックユニット31を並設方向へそれぞれ直線移動可能に設けるスライド機構10と、チャックユニット31を所定の位置に位置決めする位置決め機構15とを設け、この位置決め機構15を、並設方向に配置されて、並設方向での中心を境にして互いに逆向きとなるネジ部16,16を有し、このネジ部16に螺合させた一対のナット部18にチャックユニット31をそれぞれ連結したボールネジ17で形成して、ボールネジ17の回転により、ナット部18と共にチャックユニット31を同時に相反方向へ直線移動させて、ピッチを変更可能とした。
(もっと読む)
ロボットハンド、およびロボット
【課題】グリッパー型ロボットハンドと同程度に単純な構造でありながら、人間型ロボッ
トハンドのように高い汎用性を有するロボットハンドを提供する。
【解決手段】指部の先端側の腹部の一部を、別部材(指先部材)を用いて構成し、この指
先部材は、指部に収納した状態と、指部から突出した状態とに切り換え可能とする。また
、把持する対象物を検出する圧力センサーは、指先部材に設けておく。こうすれば、大き
な対象物や重い対象物については、指先部材を収納して指部の腹部で把持することで、し
っかりと把持することができる。また、小さな対象物については、指先部材を突出させて
、指先部材で把持する。何れの場合でも圧力センサーは1つでよいので、構造を単純化す
ることができる。
(もっと読む)
把持装置
【課題】真空排気設備を必要としない簡易な構成で、当接部を硬化させることができる把持装置を提供する。
【解決手段】袋部材6a内を減圧させることにより、粒状物12を任意の形状を保持しつつ硬化させる、ワーク20と当接する部位である各当接部6・6・6、を有する把持部2を備え、袋部材6aの内部と外部を連通する連通配管8と、連通配管8が形成する流通経路における流体の流れ方向を袋部材6aの内部から外部へ向かう方向に規制する逆止弁9と、袋部材6aと逆止弁9を連通する連通配管8を分岐して延設した連通配管8が形成する流体の流通経路上に配設する開閉弁10と、を備え、各挟圧部4b・4b・5bによりワーク20を挟持して、各当接部6・6・6をワーク20に押圧することにより、袋部材6a内の空気を、袋部材6aの外部に流出させて、袋部材6a内を減圧する。
(もっと読む)
把持装置
【課題】耐磨耗性および耐切創性に優れ、かつ、良好な把持状態が保持できるとともに、容易に交換ができる当接部を備え、さらに当接部の交換が容易でありながら、当接部が該当接部の付設部に対して変位することを防止できる把持装置を提供する。
【解決手段】ワーク50を挟圧する各挟圧部4b・4b・5bを有する各爪部4・5と、弾性素材からなる内袋11と、該内袋11に充填される粒状物12と、を備え、内袋11内を減圧して、内袋11の内容積に対する粒状物12の体積比率を増大させることにより、粒状物12を任意の形状を保持しつつ硬化させる、各挟圧部4b・4b・5bのワーク50と当接する部位に付設される各当接部6・6・6と、を有する把持部2を備える把持装置1であって、各挟圧部4b・4b・5bの各当接部6・6・6を付設する付設面4g・4g・・・に、凹凸形状を有する各係止部10・10・・・を形成する。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
把持装置
【課題】把持装置の駆動装置を大型化することなく、寸法が異なる複数種類の対象物を把持できるとともに、把持する対象物の種類を変更する場合の対応時間を短縮ことができる把持装置を提供する。
【解決手段】寸法が異なる複数種類の対象物1、2を把持して移動させる把持装置10。対象物1、2を把持するように駆動される把持部3と、把持部3が動作可能に把持部を保持する保持体5と、把持部3に装着可能なアタッチメント7と、を備える。把持部3は、アタッチメント7が装着されていない時には、第1種類の対象物1を把持可能であり、アタッチメント7が装着されている時には、アタッチメント7を介して第2種類の対象物2を把持可能である。
(もっと読む)
ワークの自動積載方法及びその装置
【課題】サイクルタイムを短縮することができるワークの自動積載方法及びその装置を提供する。
【解決手段】先ず、初期位置からロボットヘッド20を第1プレートW1の上方に移動し、ロボットヘッド20に設けられた第1把持部42、42にて第1プレートW1を把持する。そして、ロボットヘッド20を第2プレートW2の上方に移動し、ロボットヘッド20に設けられた第2把持部54、54にて第2プレートW2を把持する。その後、第1プレートW1及び第2プレートW2を把持した状態でロボットヘッド20をトレー104に形成された凹部106の上方に移動し、第1プレートW1及び第2プレートW2の把持を解放することにより、第1プレートW1及び第2プレートW2を積載する。
(もっと読む)
ハンド装置
【課題】大きさの異なる複数の所定ワークを把持する際に、ワークの大きさに合わせて把持状態検出センサの位置調整を行う必要がなく、フィンガの開閉時間及び把持力の変動を小さくすることができ、コストの増大及び生産性の低下を抑制することができるハンド装置を提供する点にある。
【解決手段】ワークを把持する把持手段2のオン−オフ式の開閉動作を行ってワークの脱着を行うハンド装置1であって、把持手段2が複数のフィンガ3,3を同期させて開閉するものであり、フィンガ3,3に、被把持部の大きさが異なる複数のワーク又は複数の被把持部の大きさが異なる単一のワークを把持する、複数の把持部C1,C2を設け、把持部C1,C2を、対応する前記被把持部を把持した際におけるフィンガ3,3の開き位置が同じになるように、前記被把持部の所定の大きさに合わせて形成した。
(もっと読む)
把持装置
【課題】簡素な構造からなり、少数のアクチュエーターで駆動することができるとともに、多様な目標物体に対応することができる把持装置を提供する。
【解決手段】把持装置1は、グリッパーの対向する左右の2指がともに平行リンクで構成される。左右の指部25、35の把持面には、薄く細かい物体を捕捉するための爪部が、内側に向かって突出する爪部が、先端縁に沿ってそれぞれ形設されている。爪は、その断面が45度程度の鋭角をなし、開閉方向の内側に向かって突設している。したがって、左右の指部25、35を閉成すると、爪の鋭角な先端が対象物体と接地面の間に潜り込むので、掴み易くなる。
(もっと読む)
ハンドおよびマニプレータ装置
【課題】ワークの大きさが変化しても把持力を一定にでき、かつ、小型化を実現できるハンドを提供すること。
【解決手段】ハンド5は、アーム6の先端に設けられて異なる大きさのワークを把持する。このハンド5は、アーム6の先端に固定された固定部20と、この固定部20に接近または離間可能な可動部30と、を備える。固定部20は、所定方向に延出する2本の第1フィンガ22A、22Bを有し、可動部30の他方は、第1フィンガ22A、22Bに略平行に延出する3本の第2フィンガ32A〜32Cを有する。可動部30は、第2フィンガ32A〜32Cが第1フィンガ22A、22Bに対して略平行である状態を維持しつつ、この固定部20に対して接近または離間する。
(もっと読む)
先端可動爪を有するチャックハンド
【課題】ワークが近接して配置されていたり、ワークに設けられた特定の凹みを利用してワークを把持するような場合でも、ハンドが挿入できるだけのスペースでワークの把持部に挿入することができ、ハンドでワークを挟む「挟み動作」により、先端可動爪を引き起こしてワーク下面を支持しその落下を防止する「すくい動作」ができる先端可動爪を有するチャックハンドを提供する。
【解決手段】搬送ロボットのハンド取付部に取り付けられたハンド本体12と、ハンド本体に末端部が開閉可能に取り付けられた複数のハンド14と、各ハンドの先端部に設けられハンドと直線状に位置するハンド伸直位置Lとハンドから引き起こされた他方位置Iに揺動可能な複数の先端可動爪16と、各ハンド内に設けられ複数のハンドでワークを挟む「挟み動作」により先端可動爪をハンド伸直位置から引き起こす複数の揺動機構20とを備える。
(もっと読む)
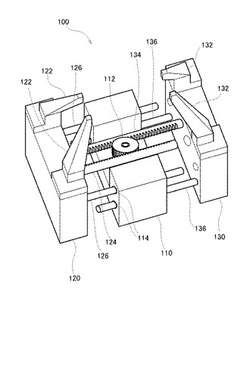
ワーク把持装置
【課題】把持力の調節が容易なワーク把持装置を提供すること。
【解決手段】ワーク把持装置は、第1ねじ部3aと、第1ねじ部3aに対して逆向きのねじ山を有する第2ねじ部3bとが形成されたボールねじ軸3と、ボールねじ軸3を回転駆動する電動モータ4と、ワークWを挟んで把持する第1把持手段5a及び第2把持手段5bと、第1把持手段5aを直線移動させるために第1ねじ部3aに螺合している第1移動体6aと、第2把持手段5bを直線移動させるために第2ねじ部3bに螺合している第2移動体6bと、第2把持手段5bを第2移動体6bに対して直線移動させるために第2移動体6bと第2把持手段5bとの間に配設された流体圧シリンダ装置8と、を具備する。
(もっと読む)
1 - 20 / 53
[ Back to top ]