
Fターム[3C007EV27]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 付加機能を有するもの (310) | 物品を挟持したまま回転させるもの (51)
Fターム[3C007EV27]に分類される特許
41 - 51 / 51
半導体移送装備(Semiconductormaterialhandlingsystem)

【課題】半導体移送装備を提供すること。
【解決手段】半導体移送装備において、ウエハ移送ロボット1000は、フレーム内に装着され、所定の昇降軸に沿って上下移動する昇降部材を含むロボットボディー100と、駆動リンクと複数の被動リンクとからなり、駆動リンクは昇降部材に装着され、被動リンクの末端部はロードポートが装着されたフレーム面に沿って水平方向に線形移動する関節アーム200と、被動リンクの末端部に装着され、垂直の回転軸を中心に回転するスイングユニット300と、スイングユニットに装着されるベース、ベースに装着されて水平方向に直線往復運動する複数のスライディングユニット、およびウエハカセットからウエハを引き出し、収納するウエハハンドを含む直交アーム400とを備える。
(もっと読む)
重量物の回転装置

【課題】把持部材の作動タイミングの同期を図ることなく、重量物を回転させることができ、かつ重量物を把持していない把持部材の空回転等を防止し、重量物を安定した状態で回転させる回転装置を提供する。
【解決手段】装置本体に対向配置されて互いに接離自在に設けられた一対の把持アーム2a、2bと、これらの把持アームを接離方向に向けて移動させる駆動手段21a、21bと、把持アームの対向部にそれぞれ設けられ、互いに接近した際に重量物wを把持するとともに、把持アームの移動方向回りに回転自在に設けられた一対の把持部材31a、31bと、一方の把持アームに設けられて、一方の把持部材を回転駆動させる回転駆動手段4とを有する回転装置とした。他方の把持アーム2bには、一対の把持部材による重量物の把持が解かれた際に、他方の把持部材の移動方向回りの回転を阻止する回転阻止機構を設けた。
(もっと読む)
開閉型工具用自動開閉構造
【課題】 人間が使用するペンチ等工具をひとつのハンドで利用できる開閉型工具用自動開閉構造を提供すること。
【解決手段】 開閉型工具用自動開閉構造1は、開閉型工具8のグリップ9の把持のためにグリップ9一本あたり一本以上の指21を用いて運動M2が可能なように構成されるグリップ把持機構2L、2Rと、両グリップ9、9間の開閉のために二組のグリップ把持機構2L、2Rの相対位置を運動M3のように変化させることのできるグリップ開閉機構と、グリップ把持機構2L、2Rにおける指21の運動から両グリップ9、9間の開閉動作を円滑にする受動回転手段4とを備えてなる構成を基本とする。
(もっと読む)
開閉型工具用自動開閉構造
【課題】 人間が使用するペンチ等工具をひとつのハンドで利用できる開閉型工具用自動開閉構造を提供すること。
【解決手段】 開閉型工具用自動開閉構造1は、開閉型工具8のグリップ9の把持のためにグリップ9一本あたり一本以上の指21を用いて運動M2が可能なように構成されるグリップ把持機構2L、2Rと、両グリップ9、9間の開閉のために二組のグリップ把持機構2L、2Rの相対位置を運動M3のように変化させることのできるグリップ開閉機構と、グリップ把持機構2L、2Rにおける指21の運動から両グリップ9、9間の開閉動作を円滑にする受動回転手段4とを備えてなる構成を基本とする。
(もっと読む)
把持装置
【課題】 本発明は、自動旋盤の回転を停止させずにワークの供給・排出を行う把持装置において、耐久性が高く、高速回転においても焼き付きをおこさない把持装置を提供する事を目的とする。
【解決手段】 複数のクランプ部材を駆動源により開閉する把持装置において、クランプ部材に円柱状のシャフトと、円筒状の外輪を配置し、円柱状のシャフトには円筒状の外輪と勘合する箇所に複数の穴を構成し、複数の穴からエアーを排出するとともに、円筒状外輪がワークを把持する把持装置を構成する。
(もっと読む)
加工物移送装置
1つ以上の加工物、例えば、半導体ウエハを操作するための加工物移送アセンブリは、加工物の外径に対応する1つ以上の弓状部分を含む。この弓状部分は、加工物の外端に係合する加工物係合表面を有する;少なくとも1つの協働アームが、加工物の係合表面から加工物の外端部上に加わる圧力に応じて、加工物から離れる方向に加工物係合表面の変形を可能にするたわみアセンブリを含む。 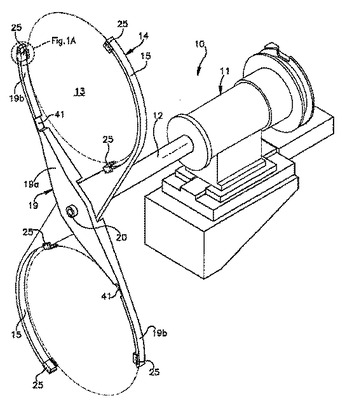 (もっと読む)
(もっと読む)
5度の自由度を持つ、キャリヤ用移動プラットホーム
【課題】キャリヤ及び間隔が隔てられた少なくとも三つのクランプ手段を含む移動プラットホームを提供する。
【解決手段】クランプ手段の各々は、キャリヤを、接触点のところで、及びキャリヤの少なくとも一つのグローブ状接触面のところでクランプし、少なくとも一つのクランプ手段には、キャリヤを少なくとも二つの仮想軸線を中心として回転できるように、接触点を、少なくとも夫々の接触面及び/又は少なくとも夫々のクランプ手段に対して変位するための少なくとも一つの変位エレメントが設けられており、クランプ手段によってキャリヤに加えられる法線力は、ほぼ平行な平面内にあり、これらの平行な平面は、夫々の接触点でのグローブ状表面の接線方向平面に対してほぼ垂直である。
(もっと読む)
基板把持機構
【課題】駆動源を必要とせず、単純な構成でシリコンウェハ等の基板を適切に把持する基板把持機構の提供。
【解決手段】開放端部において把持部材11のそれぞれを支持するアーム部21を有し、把持部材11を基板100の中心軸回りに一体的に回転させる回転機構20と、基板100の中心軸を中心とする環状を呈するリング8と、アーム部21にリング8をフローティングマウントするフローティングマウント機構311と、一端部にリング押え311bを支持し、アーム部21の開放端部に揺動自在に支持された揺動部材312を有し、リング8に発生する慣性力を、把持部材11の回転を開始又は停止する際に揺動部材312の他端部を基板100の端縁から中心軸に向かう方向に揺動させる揺動力に変換する伝達機構31と、を備える。
(もっと読む)
アクチュエータ及びロボットハンド
【課題】進行波により対象物を搬送する上で、十分な搬送性能を実現することができ、構造が簡単であり、かつ小型化に適したアクチュエータを提供する。
【解決手段】アクチュエータ基板11上にフレキシブル基板14を重ね合わせて固定し、フレキシブル基板14上に複数の伸縮駆動素子12を並設して固定し、各伸縮駆動素子12の上端にシート状の弾性部材13を載せて係止し、制御駆動部15をフレキシブル基板14を通じて各伸縮駆動素子12に接続している。制御駆動部15は、フレキシブル基板14を通じて各伸縮駆動素子12に電圧を順次印加し、各伸縮駆動素子12をZ方向に順次伸縮させて、弾性部材13を変形させて波打たせ、弾性部材13に進行方向がX方向の進行波を形成する。この弾性部材13に対象物を載置すると、この弾性部材13の進行波により対象物がX方向とは逆方向に搬送される。
(もっと読む)
軸受け機構及びこの軸受け機構を用いたワーククランプ装置
【課題】 任意の位置で回転体を高精度に停止させてロックさせることのできる軸受け機構を提供する。
【解決手段】 円盤形状の回転体1と、軸受け2を介して前記回転体1を回転自在にガイドするガイド部材3と、前記回転体1に設けられ、エアーの導入によりブレーキ部材14をスライドさせて前記ガイド部材3に形成されたブレーキ当接面12に押し付け、前記回転体1の回転をロックする回転ロック手段4とを備える。回転体1をロックするには、エアーを導入してブレーキ部材14をブレーキ当接面12に押し付け、回転体1をアンロックするには、エアーの導入を停止してブレーキ部材14をブレーキ当接面12から離す。
(もっと読む)
基板洗浄装置
【課題】 基板洗浄装置の工程流れ方向に対するコンパクト化を図りつつ、基板の支持を確実化させると共に、基板のエッジ部分の異物残存を回避し、製品歩留まりを向上させる。
【解決手段】 基板2を移送しつつ、スクラビング洗浄工程、リンス洗浄工程、および乾燥工程を順次実行する基板洗浄装置1において、スクラビング洗浄工程を実行する第一の槽4と、リンス洗浄工程および乾燥工程を実行する第二の槽5とを備える。そして、第二の槽5に、基板2を垂直姿勢に保持してスピンリンス洗浄およびスピン乾燥を行うための単一のスピン部58を配備する。
(もっと読む)
41 - 51 / 51
[ Back to top ]