
Fターム[3C007FU02]の内容
マニピュレータ、ロボット (46,145) | 吸着装置の目的 (257) | 別途物品の押さえ部材を有するもの (43)
Fターム[3C007FU02]に分類される特許
1 - 20 / 43
基板移載装置
【課題】ベルヌーイチャックで吸引保持した基板を、規制体で所定姿勢に位置保持する基板移載装置において、規制体の規制機能の回復をより少ない手間で簡便に行うことができるようにする。
【解決手段】基板Wの表面に平行な方向の滑り移動を規制するガイド53をガイド取付部材51に対して着脱自在に構成する。これにより、規制体50の全体の交換を要することなく、ガイド53のみを交換するだけで、規制体50の規制機能を回復することができる。従って、規制体50の全体を交換する形態に比べて、規制体50の規制機能の回復に要する費用や手間を抑えることができる。
(もっと読む)
基板搬送アーム及び基板搬送装置

【課題】自重で撓んだ状態の基板を破損させずに基板収容容器から取り出すことができる基板搬送アームを提供する。
【解決手段】基板搬送アーム1は、基板収容容器内に水平に置かれた基板の下側に挿入されて、この基板の裏面を支持しつつ基板を前記収容容器から搬出する。基板搬送アーム1は、基板が搬出されるときに基板の裏面を支持する載置面12sを有する載置部と、当該基板搬送アーム1が基板の下側に挿入されるときに、基板の裏面を少なくとも載置面12sの高さにまで押し上げる押上部12rとを備える。
(もっと読む)
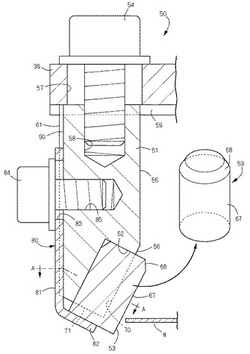
部品組み付け装置及び機械部品の製造方法
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
真空吸着装置
【課題】薄物のワークの局所変形を抑制しつつ、ワークを取り出す際の撓みを許容できる真空吸着装置の提供。
【解決手段】吸着面10aを有する多孔質体10と、吸着面10aの周囲を気密に閉塞して多孔質体10を保持するホルダ20と、吸着面10aから吸引を行う吸引装置30と、ホルダ20を支持し、吸着面10aの水平面に対する傾きを変位自在とするベローズ管40と、を有する真空吸着装置1を採用する。
(もっと読む)
保持具
【課題】 ワークの表面に対し、接触による問題がない位置にパッドを接触させることができる保持具を低コストで提供することである。
【解決手段】 ベルヌーイの原理を利用して本体に設けた保持面1aにワークWを保持する保持具を前提とし、上記本体から外方に突出させた支持部材を設け、この支持部材には、ワークWに接触して上記保持面1aとワークWとの間隔を保持するための複数のパッド12を設け、上記本体よりも外方に突出するワークWの内側にはパッド12が接触しない構成にした。
(もっと読む)
太陽電池セルの移送装置およびその移送方法
【課題】積層された多数枚の太陽電池セルのうちの最上層の太陽電池セルのみを破損することなく確実に取り出すとともに、寸法精度を確保して移送する。
【解決手段】水平な下面を有するフラットテーブル4を備え、最上層の太陽電池セルを吸着する位置と上方に退避した位置との間を昇降自在で、太陽電池セルの退避位置と移送位置との間を移送自在なベース3と、フラットテーブル4の幅方向中央を貫通してベース3に対して昇降自在な吸着パッド7と、フラットテーブル4の四隅をそれぞれ貫通するとともに、下端面がフラットテーブル4の下面よりも下方に突出して設けられた規正パッド8とから構成される。そして、吸着パッド7を介して太陽電池セルの幅方向中央部を吸着してフラットテーブル4の下面に接触するように持ち上げるとともに、規正パッド8を介して太陽電池セルの四隅を吸着してフラットテーブル4の下面に沿わせる
(もっと読む)
板状部材の支持装置および支持方法
【課題】板状部材の一方側の面に凸部および凹部が形成された場合でも適切に保持することができる板状部材の支持装置および支持方法を提供すること。
【解決手段】ウェハWの外縁に沿った環状の枠体5を備えて保持手段3が構成され、凸部WB表面に対向する吸引口7から空気を吸入することによって、ウェハWの凹部WCに吸引力を作用させることなくウェハWを吸引保持することができ、ウェハWに作用するストレスを低減させつつウェハWを適切に保持することができる。
(もっと読む)
ロボットハンド及び搬送ロボット
【課題】被搬送物Wの搬送中に、ロボットハンド9による被搬送物Wの保持状態を安定させて、被搬送物Wの搬送作業の煩雑化を十分に抑えること。
【解決手段】ハンド本体11に複数の吸着パッド19が設けられ、ハンド本体11に複数のロッド状の支持脚21が吸着パッド19の軸心方向に平行な方向へ移動可能に設けられ、各支持脚21は先端側に被搬送物Wの表面に接触可能な接触部21fを有し、各支持脚21は、ハンド本体11を被搬送物Wに対して接近させると、コイルバネ29の付勢力に抗して基端方向へ移動するように構成されていること。
(もっと読む)
基板の移載装置、およびその方法
【課題】ベルヌーイチャックで基板を吸引保持するときのハンド部の位置精度を緩やかなものとしながら、吸引保持した基板の位置決めを基板自身で自動的に行なって、非接触状態での基板の移載を高速度で能率よく行なえる移載装置を提供する。
【解決手段】パラレルメカニズムのハンド部に、基板を非接触状態で吸引保持するベルヌーイチャックと、基板を位置決めする複数個のガイド体とを設ける。基板を吸引する際には、吸引開始位置におけるベルヌーイチャックをハンド部で位置保持して、ガイド体が基板の外郭線の外に位置する状態にして基板を吸引保持する。吸引保持された基板を、ノズル穴から吹き出される空気流で一方向へ旋回させ、旋回変位する基板の辺部をガイド体で受け止めて位置決めする。以上により、基板を吸引保持するときのハンド部の位置精度を緩やかにできる。さらに、吸引保持した基板の位置決めを基板自身で自動的に行なえる。
(もっと読む)
板状部材の搬送装置及び搬送方法
【課題】搬送中の板状部材において、支持手段により支持される面と反対側の面に接触しないようにしつつ、板状部材が支持手段に対して移動することを防止できるようにすること。
【解決手段】搬送装置10は、ウエハWの一方の面側から当該ウエハWを吸引支持可能に設けられた支持手段11と、この支持手段11を移動可能に設けられた移動手段12と、支持手段11に支持されたウエハWの他方の面側から離れて位置し、支持手段11の吸引支持を補助可能に設けられた補助手段13とを備えて構成されている。補助手段13は、ウエハWに気体を噴出することでウエハWを支持手段11側に付勢可能に設けられ、支持手段11による吸引力を一定としても、ウエハWの支持力を増大できる。
(もっと読む)
基板吸着装置
【課題】基板吸着時の基板振動が抑制され、安定して基板を吸着保持することができる基板吸着装置の提供。
【解決手段】基板吸着装置は、高速流体を流出口Eから流出してベルヌーイ効果により吸着対象基板7を吸引する吸着部1と、流出口Eから吸着対象基板方向に所定距離を空けて流出口Eを囲むように配置され、吸着部1により吸引された吸着対象基板7に当接するパッド4とを備える。パッド4が流出口Eを囲むように配置されているので、吸着対象基板7がパッド4の当接したときの振動の発生を抑制することができる。
(もっと読む)
ロボットハンド及び移送ロボット
【課題】基板Wの重量、ロボットハンド1の加減速が大きくなっても、基板Wに傷が発生することを十分に抑えつつ、基板Wを移送すること。
【解決手段】ハンド本体7に基板Wの裏面当接可能な複数の当接ピン13が設けられ、ハンド本体7における各当接ピン13の周縁部に基板Wの裏面側の空気を吸い込み可能な吸込孔21が形成され、各吸込孔21が空気を吸い込む送風器19に接続されていること。
(もっと読む)
ロボットハンド
【課題】ワークの横ズレや傾きによる位置ズレの発生がなく、確実にワークを保持、固定でき、また多種多様な形状、大きさのワークに対応でき、さらにワークの保持位置の自由度が高く、汎用性に優れたロボットハンドを提供する
【解決手段】ロボットアームの先端に取り付けられ、ワーク6を保持するためのロボットハンド1であって、ワーク面の形状に追従可能なベローズ式吸着パッド2と、ベローズ式吸着パッドの内側に配置され、ベローズ式吸着パッドとともにワークを保持、固定するための高硬度吸着パッド3と、ベローズ式吸着パッドの外側に配置され、ワークの傾きを固定するための固定ロッド4とからなる。固定ロッドはシャフト4aとシャフトの先端に取り付けられたワーク押さえ部4bとからなり、固定ロッドの先端に位置決めピン7が取り付けられていてもよい。
(もっと読む)
シート材吸着装置
【課題】吸着パッドによって吸着したシート材の変形や歪みにより、2枚目以降のシート材まで同時に吸着してしまったり、シート材が破損してしまったりすることがある。
【解決手段】吸着パッド10は、パッド基部11と、外側に円錐状に拡がったパッド先端部12とからなり、吸着パッド10の中央内部には吸着口16へ向かって突出する分離ロッド13を設ける。そして、吸着パッド10がシート材40を吸着する場合は、真空ポンプ機構から通気孔15を介して空気の吸引を行う。
(もっと読む)
部品ハンドリング装置、部品位置合せ装置および部品実装装置
【課題】部品をハンドリングした状態で位置合せ可能なハンドリング装置を提供する。
【解決手段】ハンドリング装置の真空吸着部11は部品2を真空吸着して保持する。真空吸着部11に配設された吸着力調整部材15は、部品2と真空吸着部11の吸着面12との間にクリアランスを形成し、真空吸着力を減少させた状態で部品2を保持する。
(もっと読む)
搬送装置、搬送方法
【課題】 構造が簡易で、搬送時に搬送対象とする基板に、他の基板が張り付かないような構造の搬送装置を提供する。
【解決手段】 搬送装置1は、基板31を真空吸着する吸着パッド、基板31を押圧する押し棒7、押し棒7を駆動するエアシリンダ17、エアシリンダ17および吸着パッドに接続された真空発生器15を有している。
搬送装置1を用いて基板31aを搬送する場合は、まず、吸着パッドを、基板31aの上面に接触させる。
次に、真空発生器15にエアを供給して負圧を発生させ、発生した負圧により、吸着パッドが基板31aを真空吸着する。
吸着パッドが基板31aを真空吸着すると、基板31aを持ち上げつつ、真空発生器15より排気されたエアを用いて、エアシリンダ17により押し棒7を移動させて基板31を押圧、変形させ、基板31aと接触していた基板を剥離する。
(もっと読む)
吸着搬送方法及び吸着装置
【課題】吸着パッドに吸着したワークから吸着パッドを引き離す際に、ワークがその載置
位置からずれることのない吸着搬送方法及び吸着装置を提供すること。
【解決手段】吸着パッド10でワーク100を吸着した後、所定の載置位置A2まで搬送
してこの載置位置A2に載置する工程と、載置したワーク100をピン61によって載置
位置A2に押え付けた後、前記ワーク100の押さえつけを継続しつつ吸着パッド10に
よる吸着を解除する工程と、ピン61による押え付けを継続しつつ吸着パッド10をワー
ク100から引き離す工程と、ピン61による押え付けを解除する工程と、を具備する。
(もっと読む)
ワーク吸着ヘッド
【課題】パレット上に既に載置された他のワークに影響を与えずに、小型軽量のワークをパレット上に正しく載置するワーク吸着ヘッドを提供する。
【解決手段】ワーク吸着ヘッド23は、内管31、外管32、飛散防止カバー33などからなる多重構造となっており、内管31と外管32との間に形作られる隙間41と、外管32の側面に設けられたエアー排出路43が構成される。飛散防止カバー33は、吸着したレンズ11をパレット12bに載置するときにバネ34によってパレット12bに押し当てられ、吸着されたレンズ11をノズル部27から離脱するときに吸着口39から吐出されるエアー48を閉じ込める。飛散防止カバー33によって閉じ込められたエアー48は、パレット12bに既に載置された他のレンズ11に影響を与えないようにエアー排出路43を通して排出される。
(もっと読む)
移送装置および吸着盤
【課題】
軽量で、コンパクトで、経済性が優れ、若干の移送対象物のそりなどの変形を容易に吸収でき、短時間に吸着を完了し、移送タクトタイムを大幅に短縮可能な移送装置を提供する。
【解決手段】
(1)支持板2と、(2)支持板2の下面に設けられ、移送対象物7に当接され、略平行して延びている2つの封止部材3と、(3)2つの封止部材の間に設けられている吸引孔と、(4)支持板2と2つの封止部材3と移送対象物7とによって囲まれる空間内を吸引する吸引手段(図示せず)と、を備える移送装置。
(もっと読む)
基板吸着装置及び基板搬送装置並びに外観検査装置
【課題】基板にかかる応力を抑制しつつ確実に吸着保持できるようにする。
【解決手段】外観検査装置1は、基板吸着装置として板金15に固定された3つの吸着部群16A〜16Cを備える。吸着部群16A〜16Cはガラス基板Wの搬送方向に並んで配置されており、各々が3つの吸着部18A〜18Cを備える。吸着部18A〜18Cは、ガラス基板Wの裏面に吸着可能で、首振り動作が可能な吸着パッド22が1つずつ設けられている。最も中央にある吸着部群16Bの吸着部18Bは、上方に押し付け部33が配置されている。押し付け部33は補助パッド35を降下させてガラス基板Wを吸着部18Bに押し付ける。
(もっと読む)
1 - 20 / 43
[ Back to top ]