
Fターム[3C007JT05]の内容
マニピュレータ、ロボット (46,145) | 操縦桿 (385) | 従部と電気的に接続されているもの (361) | 反力感知機能を有するもの (70)
Fターム[3C007JT05]に分類される特許
1 - 20 / 70
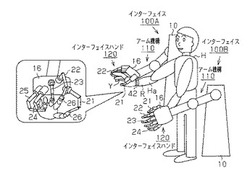
側面設置型力覚提示インターフェイス
【課題】
操作空間が広く、人間の指へそれぞれ3次元の力覚及び仮想物体の重量感を提示でき、さらに、圧迫感や装置の重量感を与えることがなく、安全で、小さな仮想物体を扱うことが可能な側面設置型力覚提示インターフェイスを提供する。
【解決手段】
力覚提示インターフェイスは操作者Hの手の指の運動に追従可能な複数の触覚指21〜25を有する触覚指ベース16と、触覚指ベースの空間運動を可能とするアーム機構110と、操作者Hの手の位置及び姿勢に連動させてアーム機構110を駆動制御するとともに、指の動きに連動させて触覚指を駆動制御するコントローラを有する。力覚提示インターフェイスは触覚指ベース16を操作者Hの手の甲側において甲から離間した状態で、触覚指に対して前記操作者の指に取付けするための指フォルダ26が設けられている。
(もっと読む)
5軸を有する力覚提示マニピュレータ

【課題】エンドエフェクタがマニピュレータのベースに対して、3自由度の並進運動および2自由度の回転動作を出力可能であり、小型で、広い範囲の回転動作が可能な力覚提示マニピュレータを提供する。
【解決手段】力覚提示マニピュレータは、マニピュレータのベース10と、エンドエフェクタ60と、エンドエフェクタ60を支持する3本のアーム20a、20b、20cと、エンドエフェクタ60と3本のアーム20a、20b、20cを連結する3本の連結リンク23a、23b、23cと、3本のアーム20a、20b、20cを駆動する駆動手段と、を備える冗長パラレルメカニズムを用いた構成となっている。
(もっと読む)
リハビリを主な目的とした触力覚提示のための振動提示装置
【課題】非周期的な力覚提示とは独立して,手関節に正確な振動を提示することのできる振動力覚提示装置の提供,およびこの装置を用いた脳卒中片麻痺患者を主な対象とする上肢リハビリ支援装置の提供
【解決手段】
人間に対し,振動力覚を提示する装置であって,人間が操作する操作部(1)と,前期操作部の手関節からの位置および/または姿勢を検出する位置あるいは姿勢検出部(2)と,振動中心が手関節上にあるように配置され,操作部の振動自由度と同じ数よりなるアクチュエータからなる振動発生部(3)と,接続部(4)とを備えることを特徴とする装置であり,非周期的な力覚提示とは独立して,手関節に正確な振動を提供することができる.
(もっと読む)
マスタスレーブシステム及びその制御方法
【課題】比較的小出力のマスタロボットを操作者が操ることによって、少なくとも電気的に接続された比較的大出力のスレーブロボットを操縦するマスタスレーブシステムにおいて、操作者に、まるでスレーブロボットを直接持っているかのような直感的な操縦を可能とせしめ、なおかつスレーブロボット側に力センサを必要としないマスタスレーブシステムの提供。
【解決手段】バイラテラル制御されるマスタスレーブシステムであって、マスタロボットをアドミッタンス型の力覚提示装置とし、マスタロボットの変位を検出するマスタ変位センサと、スレーブロボットの変位を検出するスレーブ変位センサと、マスタロボットを駆動するマスタアクチュエータと、スレーブロボットを駆動するスレーブアクチュエータと、操作者がマスタロボットに加える操作力を検出する操作力センサと、からなるものとする。
(もっと読む)
移動体遠隔操作システム、環境情報収集システム
【課題】直進運動と回転運動についてのバイラテラル制御を正確に行うことが可能な移動体遠隔操作システム等を提供すること。
【解決手段】人が操作を行う操作デバイスを有する操作システムと、前記操作システムに対してなされた人の操作に基づいて駆動される移動体システムと、を備え、前記操作デバイスには、前記移動体システムが環境から受けた反力を再現するためのアクチュエータが取り付けられ、前記操作システムと前記移動体システムとの間でバイラテラル制御が行われる移動体遠隔操作システムであって、前記操作デバイスには、直進運動指示と回転運動指示の双方を含む操作が可能となっており、前記バイラテラル制御の少なくとも一部において、直進運動と回転運動のそれぞれについて独立した演算を行うことを特徴とする、移動体遠隔操作システム。
(もっと読む)
相関性評価方法、相関性評価装置、動作再現装置
【課題】力に関する複数の収集データの相関性を適切に評価することが可能な相関性評価方法、及び装置等を提供すること。
【解決手段】人が特定の物体に対して所定の動作をする際に加えられる力を複数回計測するステップと、前記計測された力の時系列データを複数個、記憶手段に格納するステップと、前記記憶手段に格納された力の時系列データを標本とし、該時系列データ間の相関性を示す値で重み付けした隣接行列を求めるステップと、前記隣接行列を正規化した正規化隣接行列を求めるステップと、前記正規化隣接行列の固有値が1となる場合の固有ベクトルの要素の大きさに基づいて、該要素に対応する時系列データの他のデータとの相関性を評価するステップと、を備えることを特徴とする相関性評価方法。
(もっと読む)
機能性粒子を用いた触力覚提示システム
【課題】
機能性粒子を使用したブレーキを用いたパッシブ型触力覚提示システムにおける粒子の沈降の問題、および/または、的確な力覚を提示できる必要最小個数数のパッシブな力発生部を用いた力覚提示装置の提供
【解決手段】人間に対し、力感覚を提示する回転関節型リンク機構のパッシブ型力覚提示システムであって、人間が操作する操作部と、前記操作部の位置を検出する位置検出部と、前記位置検出部の出力を入力して、前記パッシブ型力発生部を制御する制御装置とを備えることを特徴とする装置であり,的確な力覚を提示することができる.機能性粒子の沈降の問題は、ブレーキ力伝達部の機構およびブレーキ回転軸の取り付け方向で解決し、的確な力覚を提示できる必要最小個数数のパッシブな力発生部を用いた力覚提示装置の提供のためには図9のような機構により解決する。
(もっと読む)
触力覚提示システム
【課題】的確な力覚を提示できる必要最小個数数のパッシブな力発生部を用いた力覚提示装置の提供
【解決手段】人間に対し、力感覚を提示する回転関節型リンク機構(5)のパッシブ型力覚提示システムであって、人間が操作する操作部(6)と、前記操作部の位置を検出する位置検出部(7)と、操作部の自由度の数と同じ数よりなるブレーキを用いたパッシブ型力発生部(8)を用いて各パッシブ型力発生部の動作によって前記操作部に対する力としてそれぞれ直交する抗力をかけることができるブレーキ力伝達部(9)と、前記位置検出部の出力を入力して、前記パッシブ型力発生部を制御する制御装置(10)とを備えることを特徴とする装置であり,的確な力覚を提示することができる.また,前記操作部に加えられた力を検出する力検出部(11)を備える際には,この情報も用いて制御することにより力覚提示性能を改善することができる.
(もっと読む)
筋骨格系機構システム
【課題】本発明は、スレーブロボット(筋骨格系機構部)に力センサを備えることなく、前記筋骨格系機構部に架かる荷重を操作者に知覚させ得る筋骨格系機構システムを提供する。
【解決手段】本発明の筋骨格系機構システムSは、生体の所定の運動に関与する筋肉の活動電位による筋電信号を測定する筋電信号測定部1と、1つの姿勢に対して複数の硬さを持つことができ、前記所定の運動を行うように前記生体の部位を模した機構である筋骨格系機構部3と、筋電信号測定部1で測定された筋電信号に基づいて筋骨格系機構部3の動作を制御する制御信号を生成する制御信号生成部21と、筋骨格系機構部3の姿勢が変化した場合に、前記姿勢の変化量を表す情報を出力する変化量情報出力部4とを備える。
(もっと読む)
グリッパシステム及びグリッパ、並びにマニピュレーションシステム
【課題】把持できる対象物の大きさの制限を緩和すること。
【解決手段】グリッパ1は、対象物を把持する把持手段2と、モータ4を用いて把持手段2を動作させる第1の駆動手段と、圧電素子入りサポートユニット3を用いて把持手段2を動作させる第2の駆動手段と、把持手段2が対象物を把持する際の把持力を検出する荷重センサ40及びひずみゲージ42を含む。把持手段2は、第1の把持部材2Aと、第1の把持部材2Aに対向して配置される第2の把持部材2Bとで構成されて、第1の把持部材2Aと第2の把持部材2Bとで対象物を挟持する。そして、モータ4を用いた第1の駆動手段が第2の把持部材2Bを動作させ、圧電素子入りサポートユニット3を用いた第2の駆動手段が第1の把持部材2Aを動作させる。
(もっと読む)
ロボット及びハンドの制御情報を確定するためのマスタ・スレーブ装置及び制御情報確定方法
【課題】 ロボットに人の器用さを実装するためのタスクスキルをモデル化し、タスクスキルを生成するための制御方式を定義し、タスクスキルに必要な制御パラメータを抽出し、タスクスキル動作手順を抽出し、対象作業に適したタスクスキルの生成を実現する。
【解決手段】 インピーダンスと力のハイブリッド制御を利用したタスクスキル生成装置1及びインピーダンス制御を利用したタスクスキル生成装置1を利用して、操作者が対象作業を動作入力・提示装置12と力センサ13を使ってスレーブ装置11のロボット2を遠隔操作し、その遠隔操作結果からタスクスキル生成に必要なタスクスキル動作手順、タスクスキルのモデルに基づいた初期条件、タスクスキル動作(インピーダンスと力のハイブリッド制御のパラメータ、インピーダンス制御のパラメータ)、終了条件を抽出する。
(もっと読む)
マニピュレータの操作評価装置及びこれを備えたパワーアシスト装置
【課題】マニピュレータの操作性を客観的に評価することのできる操作評価装置と、これを備えたパワーアシスト装置を提供する。
【解決手段】操作者により操作される操作部1、2と、該操作部1、2の操作入力に基づいて複数の動作を行う動作部11とを備えたマニピュレータに於いて、前記操作部1、2によるマニピュレータの操作性を評価するための操作評価装置であって、前記動作部11を基準位置から目標位置にまで到達させる一の動作を行わせるために要した操作部1、2の操作時間と、前記動作部11が到達した位置と目標位置との差と、前記操作部1、2の操作入力に、前記動作部11に他の動作を行わせるための操作入力が付加された場合に於いて該付加された操作入力量とを評価要素としてマニピュレータの操作性を評価する評価手段を備えている。
(もっと読む)
多自由度の力覚提示マニピュレータ
【課題】エンドエフェクタがマニピュレータのベースに対して、3自由度の並進運動および2自由度の回転動作を出力する力覚提示マニピュレータを提供する。
【解決手段】力覚提示マニピュレータは、マニピュレータのベース10と、エンドエフェクタ60と、一対の並進3自由度を有する一対のパラレルリンク機構20a、20bと、一対のパラレルリンク機構20a、20bを駆動する駆動手段と、一対のパラレルリンク機構20a、20bとエンドエフェクタ60とをそれぞれ連結する直交する回転2軸を有する一対のジンバル機構50a、50bと、を備える冗長パラレルリンク機構を用いる。
(もっと読む)
把持感覚提示装置
【課題】物体を把持した感覚を人の手に提示するための把持感覚デバイスを提供する。
【解決手段】把持感覚デバイスの把持感覚提示部2は、サーボモータ10と、差動機構20と、2つの力覚提示部30,40とを備える。力覚提示部30は、台座31と、ボールネジ32と、スライダ33と、スライドレール34a,34bと、指置き台35と、圧力センサ36と、固定側ユニット37と、支持側ユニット38とを備える。ボールネジ32は、固定側ユニット37および支持側ユニット38により、保持されており、X方向を軸として回転可能である。ボールネジ32には、マイタギア21aが取り付けられている。サーボモータ10のモータ軸11が回転すると、ボールネジ32は、X方向を軸として回転する。スライダ33は、ボールネジ32およびスライドレール34a,34bに取り付けられており、ボールナット33aと、ボールナット33aを取り付けるナット支持板33bとを含む。スライダ33は、ボールネジ32が回転すると、X方向に直線運動する。
(もっと読む)
操作方法および操作装置
【課題】動作範囲が異なるジョイスティックとモバイルロボットとの間で力覚フィードバックを得ながらの操作を可能とする。
【解決手段】動作範囲が異なるジョイスティック10とモバイルロボット11とを用い、ジョイスティック10によりモバイルロボット11を操作する。モバイルロボット11の移動中に、当該モバイルロボット11が受ける時系列な力の触覚情報を取得し、取得した前記触覚情報を時間領域で解析処理し、解析処理結果からの接触情報をジョイスティック10にフィードバックするから、力覚フィードバックを得ながら操作を行うことができ、動作範囲の異なるジョイスティック10とモバイルロボット11との間で、直感的な操作が可能となる。
(もっと読む)
位置・力再現方法および位置・力再現装置
【課題】接触と非接触を繰り返す動作をデータとして保存し、再現することができる位置・力再現方法および位置・力再現装置を提供する。
【解決手段】時系列な位置情報と力の接触情報を取得する手段であるアクチュエータ201と、取得した位置情報と力の接触情報を解析処理する制御部203と、解析処理結果を保存する記憶手段204とを備え、保存した解析処理結果により前記位置情報と力の接触情報を再現する。これにより接触時と非接触時の位置・力の双方の再現を実現でき、接触−非接触を繰り返すような動作を保存・再現させることができ、操作者Aの位置と力の双方を再現することができ、時間と空間を越えて操作者Aの動作を再現することができる。
(もっと読む)
一点の回転中心を有する力覚提示マニピュレータ
【課題】操作者の手首関節に機構の回転中心を有し、エンドエフェクタが回転3自由度運動を行う力覚提示マニピュレータを提供する。
【解決手段】本発明の力覚提示マニピュレータは、マニピュレータのベースと、エンドエフェクタと、駆動手段と、エンドエフェクタの運動を駆動手段の動力によりマニピュレータの回転中心回りの3自由度の回転運動に変換するリンク機構と、を備えるパラレルリンク機構を用いる。本発明では、マニピュレータの回転中心を機構が介在できない仮想点に設定可能なため、例えば人体の関節等にマニピュレータの回転中心を設定することが可能である。
(もっと読む)
作業用ロボットおよび同作業用ロボットに適用されるコンピュータプログラム
【課題】操作器を用いた操作者によるエンドエフェクタの位置決めや姿勢決めを簡単かつ高精度に行え、作業精度を向上させることができる作業用ロボットを提供する。
【解決手段】作業用ロボット100は、複数の自由度を備えてエンドエフェクタであるシリンジ112を変位させるロボットアーム110と、同ロボットアーム110の作動を制御するスレーブ制御装置120およびマスタ制御装置130と、ロボットアーム110を操作するためのマニピュレータ131aとを備えている。スレーブ制御装置120は、ワーク座標系内にシリンジ112の位置と姿勢を規制するための吸着点APgridの集合である吸着要素パターンAPを設定する。そして、スレーブ制御装置120は、マニピュレータ131aの操作によるシリンジ112の位置姿勢目標値に直近の吸着点APgridを位置姿勢目標補正値として特定し、同位置姿勢目標補正値に向かってシリンジ112を変位させる。
(もっと読む)
マニピュレータ
【課題】 アームとハンドとを備えたマニピュレータにおいて、ハンドを操作するための操作レバーの操作の際に、アームを操作するための操作ハンドルに意図しない操作力が入力されることを抑制する。
【解決手段】パワーアシストアーム(マニピュレータ)は、操作者がハンドの動作を視認可能な範囲内またはハンドが把持対象物を把持するときの音を聞き取り可能な範囲内に設置された操作装置を備えている。操作装置は、棒状体9を有する操作ハンドル13と、6軸力覚センサ10と、操作レバー15とを備えている。操作レバー15は、上側押圧プレート97および下側押圧プレート93と、連結プレート96に貼り付けられた歪みゲージ16とを備えている。棒状体9には、下向きに延びる第1支持棒91と下向きに延びる第2支持棒92とが設けられている。操作レバー15および操作ハンドル13は、固定プレート95に固定されている。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ロボットが環境に接触しても発振現象を生じることがなく、安定した接触状態を維持できるパワーアシスト装置およびその制御方法を提供する。
【解決手段】制御装置6によって、ロボットアーム2が環境と非接触の場合、ロボットアーム2に提示する仮想の非接触時摩擦力FLを設定し、非接触時摩擦力FLが操作ハンドル4に作用するようにアクチュエータ5を制御し、あるいは、ロボットアーム2が環境と接触し、操作力fmと外力feの向きが一致する場合には、ロボットアーム2に提示する仮想の非接触時摩擦力FLを設定し、非接触時摩擦力FLが操作ハンドル4に作用するようにアクチュエータ5を制御し、あるいは、ロボットアーム2が環境と接触し、操作力fmと外力feの向きが一致しない場合には、ロボットアーム2に提示する仮想の接触時摩擦力FHを設定し、接触時摩擦力FHが操作ハンドル4に作用するようにアクチュエータ5を制御する。
(もっと読む)
1 - 20 / 70
[ Back to top ]