
Fターム[3C007KS05]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業対象物の状態 (971) | 所定状態からのズレ (113)
Fターム[3C007KS05]に分類される特許
1 - 20 / 113
ロボット位置検出装置及びロボットシステム
【課題】移動中のロボットから検出される該ロボットの位置に対してその精度を高めることが可能なロボット位置検出装置及びロボットシステムを提供する。
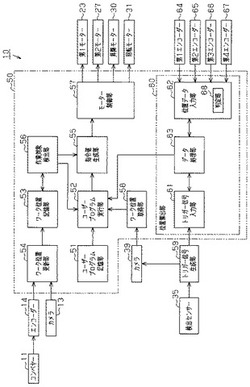
【解決手段】位置算出部60は、トリガー信号が入力されるトリガー信号入力部61と、エンコーダーから出力された位置データが通信時間の分だけ遅れて入力される位置データ入力部62と、入力された位置データを取得してトリガー信号検出時におけるロボットの位置を算出するデータ処理部63とを備えている。データ処理部63は、トリガー信号が検出される前に取得した第1の位置データとそのタイミング、及び、トリガー信号が検出された後の第2の位置データとそのタイミングを用いてロボットの位置を線形補間し、トリガー信号が入力されたタイミングよりも通信時間だけ後の位置をトリガー信号検出時におけるロボットの位置として算出する。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法

【課題】ターゲットのサブピクセルレベルでの位置検出を高精度に行う。
【解決手段】ロボット装置1は、ターゲットを搬送可能に保持する多関節ロボット10と、ゴール位置とターゲットとを撮像する撮像装置20と、画像上のゴール位置にピクセルレベルで位置合わせされたターゲットをサブピクセルレベルの変位量で変位させたときの画素値の変化量により表される感度に応じて、ターゲットが配置された状態のゴール画像データを記憶するゴール画像記憶部と、撮像装置20から得られるターゲットを含む画像データとゴール画像記憶部に記憶されたゴール画像データとの比較に基づいてターゲットの一致度評価値を計算し、この一致度評価値に基づいてゴール位置に対するターゲットの位置ずれを検出するターゲット検出部と、この位置ずれをなくす方向にターゲットを搬送するよう多関節ロボット10を制御するロボット制御装置50とを備えた。
(もっと読む)
ロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法
【課題】ロボットが有する駆動源の駆動量と実際のロボットの状態とを画像に基づいて対応付ける処理の効率を高めることの可能なロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法を提供する。
【解決手段】
水平多関節ロボット10(ロボット10)用位置検出装置は、撮像対象であるロボット10又はワークWを撮像するカメラ22と、撮像対象の位置を画像から算出する制御部33と、ロボット10の第1及び第2モーター11a,13aの駆動量を取得するI/O31と、撮像対象の算出位置と駆動量とを対応付けて記憶する。上記カメラ22及びI/O31には、撮像対象の位置を検出するための共通するトリガー信号が入力される。カメラ22は、トリガー信号の入力によって撮像対象の撮像を開始する一方、I/O31では、同トリガー信号の入力によって制御部33が駆動量を得る。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
自動組立システムおよび自動組立方法
【課題】要求される組立精度より繰り返し位置精度が大きい場合であっても、自動で部品組付けを行う。
【解決手段】第2部品画像に基づいて、組付け部位の位置を認識する第2部品認識手段と、組付け部位の位置に第1部品51を移動させる部品移動手段と、部品移動手段により移動された第1部品51を第2部品52に組付ける組付実施手段と、組付けが成功したかを判断する組付判断手段と、組付けが失敗した場合に、突き当て画像に基づいて、第1部品51の位置を認識する第1部品認識手段と、組付け部位の位置および第1部品51の位置に基づいて、第1部品51に対する位置補正量を算出する補正量算出手段と、位置補正量に基づいて、第1部品51を移動させる部品位置補正手段とを備え、組付実施手段は、部品位置補正手段により移動された第1部品51を第2部品52に組付ける。
(もっと読む)
基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法、及び基板位置補正方法
【課題】基板の位置ずれを検出することが可能な基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法を提供する。また、基板位置補正方法を提供する。
【解決手段】基板搬送用ロボットシステム10は、基板Wの下面に接触する接触部PBL、PFL、PBR、PFR及び接触部PBL、PFL、PBR、PFRに接触した基板Wの重心位置を検出するための複数のセンサSBL、SFL、SBR、SFRが設けられた基板搬送用ハンド60を有する基板搬送用ロボット20と、1)基板搬送用ハンド60上の基準となる位置にて基板Wが支持された際の各センサSBL、SFL、SBR、SFRの検出値である基準値と現在の各センサSBL、SFL、SBR、SFRの検出値との差分をそれぞれ演算する差分演算部70及び2)各差分に基づいて基板Wの位置ずれ方向を判断する第1の判断部72を有する第1の制御装置30とを備える。
(もっと読む)
ワークの特定部位認識方法及びその装置
【課題】 ワークの特定部位の位置を速やかに認識することができるワークの特定部位認識装置を提供する。
【解決手段】 ワーク1の特定部位であるボルト孔7,8を認識するワークの特定部位認識装置であって、ワーク1を撮像するカメラ2と、このカメラ2が撮像するワーク1を把持する関節型ロボット3と、この関節型ロボット3によるワーク把持位置を関節型ロボット3の座標系に基づいて算出し、ワーク把持位置と特定部位であるボルト孔7,8との相対的位置関係に基づいてカメラ2の認識領域を、特定部位であるボルト孔7,8を含む周辺領域に限定する認識領域限定手段9を備える。
(もっと読む)
パネルの搬送装置
【課題】ロボットに保持されたパネルを仮置きすることなく位置検出し直接所定位置に配置するパネルの搬送装置を提供する。
【解決手段】搬送経路に沿って順次送られてくる収容ケース11に、別位置に配置されていたパネル12を載置するパネルの搬送装置10であって、パネル12を吸着保持する吸着パッド13が設けられたロボット14と、吸着パッド13に吸着保持されているパネル12を撮像する第1の撮像手段15と、搬送経路上の停止位置で静止した収容ケース11を撮像する第2の撮像手段16と、第1の撮像手段15によって撮像された画像からパネル基準位置に対するパネル12の位置ずれ量を検出すると共に、第2の撮像手段16によって撮像された画像からケース基準位置に対する収容ケース11の位置ずれ量を検出し、収容ケース11の特定位置にパネル12を載置する吸着パッド13の移動先の座標及び向きを算出する制御手段17とを有している。
(もっと読む)
治具、搬送ロボット、円盤状搬送対象物アライメント方法
【課題】単一のセンサを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を正確に求める。
【解決手段】XY座標系上で移動するハンド23に着脱可能に取り付けた治具5を用いて、単一のセンサ6に対するウェーハの半径Wを算出し、その半径の値Wを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を求める。具体的には、円盤状搬送対象物の半径Wと同一の半径Wであり且つ中心51aをX軸上に一致させた第1部分円弧部51のセンサ6に対する通過距離と、円盤状搬送対象物の半径Wと同一の半径Wであり且つ中心52aをY軸方向に所定寸法変位させた第2部分円弧部52のセンサ6に対する通過距離と、中心51a,52a間のY軸方向の変位量ΔYaとを利用してセンサ6に対するウェーハの計算上の半径Wを算出する。
(もっと読む)
搬送ロボット、円盤状搬送対象物アライメント方法
【課題】単一のセンサを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を正確に求め、ウェーハを正確に搬送する。
【解決手段】ハンドに載置したウェーハ7のセンサ6に対する通過距離と、ハンド上における正規の載置位置に載置保持したウェーハ7がセンサ6を通過する距離と、ウェーハの半径とを利用して、ハンドに載置したウェーハ7の位置と正規の載置位置との差異を求める載置位置差異算出手段42と、その差異を旋回軸31a及びアーム2のロボット動作極座標系における補正値に変換して算出する補正値算出手段43と、その補正値を出力する補正値出力手段44とを有する搬送ロボット1とした。
(もっと読む)
ロボット制御装置及びロボットの制御方法
【課題】仕切り板の配置にずれがあるパレットについても、手先との干渉を極力回避しながら作業を継続できるロボット制御装置を提供する。
【解決手段】ロボットの手先がパレットのマスの内部に挿入されると距離センサで検出される距離から周辺を囲む仕切り板の正規位置からのズレ量を検出し(S8)、パレットの外枠部分は予めフラグ「OK」を設定し(S1)、ズレ量が「ゼロ」,「マイナス」なら(S9:YES)当該仕切り板に隣接するマス側にフラグ「OK」を(S10)、ズレ量が「プラス」なら(S9:NO)当該仕切り板に隣接するマス側にフラグ「NG」を設定する(S11)。各マスのうちフラグ「NG」の設定がないものにつきフラグ「OK」の数を計算し(S2)、フラグ「OK」の数が「2」以上で最大のマスからワーク3の取出しを行ない(S6)、「2」以上のマスが存在しなければ(S4:NO)ワーク3の取出しを中止する。
(もっと読む)
生産システム
【課題】ワークを把持したロボットが複数の処理装置間を順次移動してワークを製品化する生産システムにおいて、ロボットと処理装置との間のワークの授受位置を自動で効率的に取得可能とし、システムのフレキシビリティの向上を図る。
【解決手段】処理装置4は、指向性のある無線の通信部41を備え、ロボット3は、処理装置4の通信部41との間で相互に通信する指向性のある無線の通信部31と、処理装置4上の所定の特徴点42を撮像して位置認識を行う画像処理部(CCDカメラ32a)と、ハンド部33と、を備え、ロボット3は、相互の通信部31,41を用いて処理装置4に対する位置関係を検出し、その検出の後に、画像処理部を用いて特徴点42を認識することにより処理装置4に対する精密な位置関係を検出し、これに基づいてワークの授受位置を取得する。2段階の位置検出により、狭いカメラの撮像範囲で精度良く効率的に位置を取得できる。
(もっと読む)
溶接マニピュレータ教示装置
【課題】レーザ光が照射された溶接ワークの撮像画像に基づく仮想ワイヤ距離Lを表示することで、溶接ワイヤの曲げ修正の手間をなくし、教示作業の精度向上、容易化を図る。
【解決手段】本発明に係る溶接マニピュレータ教示装置1は、溶接マニピュレータ2の溶接ノズル3に備えられる溶接ワイヤ4を溶接ワークWの溶接線Sに沿わす溶接動作を、溶接マニピュレータ2に教示する。溶接マニピュレータ2に、溶接ワイヤ4のワイヤ軸WJ方向又はこのワイヤ軸WJを横切る方向に沿ってレーザ光Kを溶接ワークWへ照射する投光器5と、投光器5のレーザ光軸LJを横切る方向からレーザ光Kが照射された溶接ワークWを撮像するカメラ6とを配備した光学機構7が設けられ、カメラ6の撮像画像Gと、撮像画像Gに基づいて計算された溶接ノズル3から溶接ワークWまでの仮想ワイヤ距離Lとを表示する表示手段8を有する構成となっている。
(もっと読む)
ロボットの制御装置およびロボットを制御する方法
【課題】ロボットがラフな寄り付きでそのまま精密な作業をすることができるための作業教示データ修正方法、および装置を提供する。
【解決手段】ロボットが行うべき作業対象物に対する作業手順を記憶する作業手順記憶手段と、再生時のロボットと作業対象物との相対的位置及び相対的姿勢が、別の位置及び姿勢となったことを位置・姿勢検出手段によって検出したことに応じて、位置及び姿勢の変化量を獲得し、算出値に基づいて作業手順を修正する作業手順修正手段とを備え、修正される作業手順が、接触状態検出手段によって検出された作業対象物の位置及び姿勢をもとに得られる、ロボットを基準とした座標から作業対象物を基準とした座標への同次変換行列を用いてロボットを基準とした座標上での作業手順として与えられる、ロボットの制御装置。
(もっと読む)
ロボットの教示手順校正装置および方法
【課題】ロボットの特徴である高速性を失わずに作業対象物に接触するとともに接触位置検出し、エンコーダ分解能程度のサブミリ単位の高精度検出することで、高速高精度なロボットの作業座標系のキャリブレーション(校正)方法を提供する。
【解決手段】弾性変形領域を持ったプローブを用いて、位置姿勢誤差発生前後において接触位置検出処理を所定回数繰り返すことで、ロボット座標に対する作業対象物の位置姿勢を算出し、位置姿勢誤差を計算し、位置誤差発生前の教示データを修正するという手順で処理する。
(もっと読む)
ロボットの作業成否判定装置、および方法
【課題】周辺環境の影響を受けず、作業の邪魔になり難く、ワークの個体差やラッチ有無の影響を受けずにロボットによる作業の成否を判定する作業成否判定装置及び方法を提供する。
【解決手段】作業成否判定装置は、ロボットによる作業対象物に対する所定の作業の実行後、ロボットの手先に取り付けられた弾性変形領域を持つ位置・姿勢検出手段が、作業対象物に関連する所定の位置に接触するよう、ロボットの手先を移動させる位置指令を生成する位置指令生成部と、手先に印加される外力の値と位置・姿勢検出手段の先端位置とから所定の位置に接触する際の位置・姿勢検出手段の先端位置(接触位置)を算出する接触位置検出部と、接触位置が所定の範囲内に収まる場合に所定の作業が成功したと判定し、そうでない場合に所定の作業が失敗したと判定する作業成否判定部とを備える。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、ハンド4の先端付近に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
作業マニピュレータのセンシング動作生成方法及びセンシング動作生成装置
【課題】円弧部分を有する作業ワークであっても、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】本発明の作業マニピュレータのセンシング動作生成方法は、円弧部分Cを有する作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する際に好適なものである。センシング動作生成方法は、作業ワークWの円弧部分Cが離散点Dで近似された離散ワークモデルDMにもとづいて、離散点D間が補間されたリアルワークモデルRMを推定し、推定されたリアルワークモデルRMをもとに作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
自動溶接装置
【課題】 枝管と母管の溶接個所を溶接トーチで正確に溶接する。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。ロボットコントローラ19に、探触子14に接続したタッチセンサ16の接触検出信号を入力可能とし、更に外部の制御装置20を接続する。ロボットコントローラ19で多関節ロボットを制御して枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに外嵌させるときに、制御装置20により、馬蹄型ガイド5と予め探触子14で検出した溶接対象の枝管2aの位置のずれ量を求め、このずれ量を解消するための馬蹄型ガイド5の位置補正量を求めてロボットコントローラ19へ与えることで、馬蹄型ガイド5を外嵌させた溶接対象の枝管2aを、溶接トーチ11の円周動作の軌道の中心に配置させる。
(もっと読む)
採取対象物品の認識構造及びこれを用いた採取情報認識装置並びに採取処理装置
【課題】採取対象物品の位置及び姿勢に関する配置情報を容易且つ正確に認識可能とする。
【解決手段】採取対象物品2を予め決められた位置関係で保持する保持基台1の一部に設けられ、保持基台1の位置及び姿勢からなる配置情報を認識する基準となる認識基準面11と、この認識基準面11に対し撮像具5にて撮像可能に設けられ、中心位置Cから周囲に向かって濃度パターンが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12とを備える。尚、保持基台1に代えて採取対象物品2そのものに認識基準面11及び認識表示体12を設けてもよい。更に、これらを用いた採取情報認識装置、採取処理装置をも対象とする。
(もっと読む)
1 - 20 / 113
[ Back to top ]