
Fターム[3C007KS10]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業環境(例;雰囲気温度) (665)
Fターム[3C007KS10]の下位に属するFターム
作業者の位置、状態 (250)
障害物の位置、状態 (207)
他のロボット、機械の位置、状態 (76)
Fターム[3C007KS10]に分類される特許
61 - 80 / 132
環境地図の生成方法及び移動ロボット
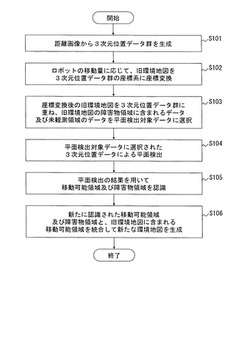
【課題】移動ロボットにおける環境地図の生成に要する演算時間を短縮する。
【解決手段】移動ロボット100は、レンジセンサ10により得られた計測情報を用いて外部環境の3次元位置データ群を生成する。次に、過去に生成された旧環境地図及びロボット100の移動量に基づいて、3次元位置データ群に含まれる3次元位置データのうち、少なくとも、旧環境地図において障害物領域とされた領域に属する3次元位置データ、及び、旧環境地図に含まれていない未観測領域に属する3次元位置データを平面検出対象データに選択する。次に、平面検出対象データを用いて平面検出を実行する。次に、平面検出の結果を用いて、平面検出対象データに含まれる移動可能領域及び障害物領域を認識する。最後に、平面検出の結果を用いて認識された移動可能領域及び障害物領域と、旧環境地図において移動可能領域とされた領域を統合して新たな環境地図を生成する。
(もっと読む)
表面に情報表示および相互作用機能を備える可動装置

【課題】表面に情報表示および相互作用機能を備える可動装置を提供する。
【解決手段】表皮ユニット11が可動本体10表面に貼設されることによってケーシングに情報を表示することができ、ソフトウェアの制御によって外皮の色、図案または文字情報を随時変化させることができる。可撓性ディスプレイ110には更にタッチセンサユニット112を設置することができ、入力される相互作用信号を感知できる。可動本体10には環境センサまたは情報識別装置を整合でき、有線または無線の技術によって環境情報、文字情報または画像音声情報の判断を入力信号とし、複数の入力信号と出力表現信号とを整合して可動本体10の相互作用性を高めることができる。
(もっと読む)
案内ロボットの制御方法、システム、制御装置、案内ロボット、および案内ロボット制御プログラム
【課題】時々刻々変化する売り場の混雑状況に合わせて動的にロボットを配置し、買い物客を混雑した場所からすいている場所に誘導することを目的とする。
【解決手段】施設内監視装置により該施設内の状況を監視して案内ロボット制御装置に送り、案内ロボット制御装置は、予め該施設内の各場所における告知項目を保持し、該施設内監視装置から受け取った該施設内の状況を解析し、該施設内の、人の混雑している場所とすいている場所を検出し、該すいている場所の入り口を案内ロボットの配置先として設定すると共に、該保持する告知項目から該すいている場所における告知項目を選択して告知内容として設定し、該設定内容を案内ロボットに通知し、該設定内容を通知された案内ロボットは、該通知された案内ロボットの配置先に移動すると共に、該通知された内容を告知して案内することを特徴とする。
(もっと読む)
防犯ロボットシステム及び防犯ロボットによる監視方法、警告方法
【課題】
解決しようとする課題は書店、スーパマーケットなどの店舗での万引き等の被害発生の可能性のある不審者を特定し、顧客と区別しながら、不審者を監視して警告を行なう防犯システムが無いことである。
【解決手段】
固定及びロボットに装着した監視カメラによる撮影映像から特定し、登録した不審者を自律移動ロボットによる巡回、及び特定位置で監視を行うと共に、撮影した不審者の映像を過去の映像と併せての表示、あるいは音声での警告などを行ない、店舗内での防犯を行なう。
(もっと読む)
移動ロボット
【課題】 検出部の検出精度低下を防止し、また、騒音を低減して明瞭な音声を取得できる移動ロボットの提供。
【解決手段】 移動手段により屋外の監視区域の路面上を移動し、監視区域における音声を収集する移動ロボットであって、移動ロボット周辺の音声を収集する集音部と、検出窓を通して、移動ロボットの周囲または移動方向における環境情報を検出する検出部と、 検出部の検出窓に空気を吹き付けて検出窓に付着した水滴を除去する水滴除去部と、水滴除去部に対し起動または停止を制御する制御部を有し、制御部は、集音部にて収集した音声信号を外部出力または記録の開始が実行されるとき水滴除去部の動作を停止する。
(もっと読む)
移動制御方法、移動ロボットおよび移動制御プログラム
【課題】適切な移動経路を自動的に生成することができることのできる移動制御方法、移動ロボットおよび移動制御プログラムを提供する。
【解決手段】移動ロボットにおける移動制御方法であって、追従すべき任意の追従人物を検出する人物検出ステップと、追従人物に追従して移動する追従ステップと、追従ステップにおける移動中に、当該移動ロボットの周辺環境を検出する周辺環境検出ステップと、周辺環境検出ステップにおいて、予め定められた目的地条件に合致する周辺環境を検出した場合に、当該位置を目的地として特定する目的地特定ステップと、移動可能経路保持手段が保持する移動可能経路と、目的地特定ステップにおいて特定した目的地とに基づいて、移動ロボットが移動する経路であって、かつ目的地を含む移動経路を作成する移動経路作成ステップとを有する。
(もっと読む)
点検ロボット
【課題】建造物の床下や天井裏等の閉空間において、短時間で点検漏れのない効率の良い点検を実現可能な点検ロボットを提供する。
【解決手段】任意の閉空間を点検するための点検ロボットであって、閉空間内の走行面上を移動するための移動機構120と、撮像時におけるズーム倍率が可変であり、閉空間内の被写体を撮像する回動可能な撮像ユニット13と、撮像ユニットを用いて、被写体を低倍率ズームで自動撮像する第1点検制御部102と、低倍率ズームで自動撮像された被写体の一部又は全部の範囲を、撮像ユニット13を用いて、高倍率ズームで自動撮像する第2点検制御部103とを備え、第1及び第2点検制御部102,103は、移動機構120又は撮像ユニット13の少なくとも一方を制御することで、被写体における撮像位置を順次シフトする。
(もっと読む)
水中ロボットの動作制御方法、装置、プログラム及びその記録媒体
【課題】事前に障害物の位置についての情報を得る必要がない劣駆動型自律ロボットの制御方法を提供する。
【解決手段】原点を目標到達位置とし障害物の位置を考慮せずに、価値関数を生成する。新たな障害物を検出するごとにその障害物の位置を求める。障害物にぶつからずに目標到達位置に到達するまでの、各時刻ステップにおける目標軌道位置を生成する。水中ロボットが各行動を取ったときに、上記目標軌道位置にどの程度近づくことができるのかを数値で評価し、その評価値により各行動に優先順位を付ける。水中ロボットが各行動を取ったときの障害物へのぶつかりやすさを計算する。優先順位の高い行動の順番で、その行動を取ったときの障害物へのぶつかりやすさが一定の閾値よりも小さいかどうかを判定し、小さいと判定された場合にはその行動を選択する処理を、行動が選択されるまで繰り返す。上記選択された行動に従うように、水中ロボットを制御する。
(もっと読む)
アームを誘導可能な移動体およびアームを誘導する方法
【課題】 移動する本体とその本体に移動可能となっているアームの両者を目標物へ誘導する際に、必要以上に大きなデータを扱う必要がなく、アームを適切な経路で目標物へ誘導することが可能な技術を提供する。
【解決手段】 本発明の移動体は、移動可能な本体と、本体に移動可能に連結されたアームを備えており、そのアームを目標物へ誘導することができる。その移動体においては、本体の移動経路はグローバルマップに基づいて生成され、アームの移動経路はローカルマップに基づいて生成される。ローカルマップは、周囲の環境の形状とアームの位置に基づいて更新される。周囲の環境の形状は、移動体の本体から周囲の環境までの距離を計測することによって認識される。
(もっと読む)
アンドロイド制御システム
【課題】自然な動作を実行する擬似人間ロボットを提供すること。
【解決手段】アンドロイド制御システム10はアンドロイド12を含み、アンドロイド12は人間の代役として或る場所に配置される。通常、アンドロイド12は、制御装置14の制御に従って、人間との間で対話するなどのコミュニケーションを図る。ただし、アンドロイド12自身が対応できない場合には、その旨を遠隔オペレータに通知する。かかる場合には、遠隔オペレータの指示に従って、アンドロイド12は動作される。また、アンドロイド12は、たとえば、その近傍や周囲に人間が存在しない場合や遠隔オペレータからの指示がない場合には、制御装置14の制御に従って無意識動作を実行する。つまり、瞬きや呼吸のような生理的な動作をしたり、髪を触るなどの癖による動作をしたりする。
【効果】 無意識動作のようなアンドロイド特有の動作を実現できる。
(もっと読む)
自律移動ロボット、自律移動方法および自律移動情報処理プログラム
【課題】従来の自律移動ロボットでは、自律移動中の障害物の回避が不能等の突発的事態に対処するための人的介入や、自律移動中に一時的な経路変更をするなどの人的介入を行う場合に、当初の自律移動を強制終了して新たな移動条件を与えて新たな自律移動を開始することが必要で、自律移動中の人的介入を柔軟に行うことができない、という課題があった。
【解決手段】自律移動ロボットを駆動する走行制御系と、該自律移動ロボットの周囲の存在物の相対位置を観測する観測手段と、外部からの人的介入情報を入力する人的介入情報入力手段と、前記観測された存在物位置情報を所与として、かつ前記人的介入情報を所与とするアルゴリズムで移動経路を作成する半自律移動経路計画エンジンと、前記移動経路に基づいて該自律移動ロボットを移動させる走行コマンドを生成する走行コマンド生成部と、を有する自律移動ロボットによって上記課題が解決される。
(もっと読む)
人物識別システム
【課題】特定人物の識別精度の向上が図れる人物識別システムを提供すること。
【解決手段】特定人物Mの識別に用いる識別情報において特定人物Mを識別するのに不足している条件を判断し、特定人物Mを追尾して移動するモビルロボットRにより上記条件となったときに特定人物Mの識別に用いる特徴情報を取得し、その特徴情報を特定人物Mの識別に用いる識別情報として設定して識別情報の更新を行う。特定人物Mを追尾するモビルロボットRにより識別に必要な特徴情報を取得するため、タイミングを逃すことなく確実にその特徴情報を取得することができる。
(もっと読む)
自律移動装置
【課題】特定の人のそばについて自律的に移動する自律移動装置において、特定の人から見て死角となる領域に関する情報を報知することが可能な自律移動装置を提供する。
【解決手段】自律移動装置C1は、主人B1のそばについて自律的に移動しつつ、カメラ10および通信機12により主人B1の視野が総合的に認識されて視覚情報が取得される。そして、この視覚情報に基づいて死角領域VF1が死角領域検出部22により検出される。そして、検出された死角領域VF1に関する死角情報が、プロジェクタ42などにより歩道SW1上の地面に対して投影されて主人B1に報知される。この結果、主人B1から見て死角となる領域VF1に関する情報を、この主人B1に対して報知することが可能となる。
(もっと読む)
自律移動体および情報構築システム
【課題】 観光地などで特定人物を撮影する際、特定人物を撮影した画像の情報を観光地の情報として有効活用することができる自律移動体を提供する。
【解決手段】 モビルロボットRは、特定人物Mを含む画像情報、画像を撮影した際の撮影方向、および自己の位置を送信部18から基地局Bに送信する。基地局Bでは、受信部21で受信したこれらの情報に基づいて、モビルロボットRが撮影した撮影対象を特定し、この撮影対象を観光対象として保存蓄積して観光情報を構築する。
(もっと読む)
制御システム、記録システム、情報処理装置および方法、プログラム、並びに記録媒体
【課題】制御における通信や処理の遅延や環境の変化に対する耐性を向上させ、制御の負荷や破綻を抑制することができるシステムを提供すること。
【解決手段】ユーザは、スレーブ13と幾何形状が同一のロボットのマスタ12を操作し、制御装置11を介してスレーブ13を制御する。制御装置11は、マスタ12の操作により生成されるスレーブ13に対する制御コマンドを、その制御コマンドの生成タイミングにおいてスレーブ13より供給されるセンサ情報とともに、システム内に生じる制御遅延を含む形で記録する。制御装置11は、その制御コマンドとセンサ情報とに基づいて、制御遅延を考慮した時系列的に先の制御コマンドを予測し、その制御コマンドによりスレーブ13を制御する。本発明は、情報処理システムに適用することができる。
(もっと読む)
自律移動装置
【課題】使用者の所持物を考慮した動作を行う自律移動装置を提供する。
【解決手段】特定の人のそばについて自律的に移動する自律移動装置10において、周囲環境に影響を与える所定の物体が登録された記憶手段26と、記憶手段に登録された物体が特定の人により所持されているか否かを判定する判定手段22と、判定手段により物体が所持されていることが判定された場合に、物体が周囲環境に与える影響を低減するように自律移動装置を動作させる動作制御手段24と、を備える。
(もっと読む)
自律移動型ロボット
【課題】悪意のある人物から主人が被害を被るおそれを低減することが可能な自律移動型ロボットを提供する。
【解決手段】周辺環境を観測しつつその観測情報に基づいて自律して移動可能な自律移動型ロボットRであって、主人Mと相手との会話を記録する会話記録手段8,5F,5Gと、話し手の意図と関連した言語情報を記憶する言語情報記憶手段5Iと、相手との会話と言語情報とを対比して、相手の意図を推定する推定手段5Hと、相手に悪意があると推定された場合に、主人Mに知らせる報知手段5J,5K、7と、を備える。
(もっと読む)
溶接ロボットシステム
【課題】溶接機の接続状態の設定において、手入力による設定ミスを削減し、設定ファイルを選び易くする溶接ロボット制御装置を提供する。
【解決手段】溶接ロボット制御装置から接続している各溶接機に順に駆動命令を送信し、ワイヤ送給装置から受信する信号の変化により、当該溶接機に対応しているマニピュレータを特定し、溶接ワイヤの材質及びワイヤ径の情報を入手し、当該溶接機が返信する情報により、当該溶接機の機種及び当該溶接機に接続されているワイヤ送給装置の種別を入手することで手入力を減らして設定ミスを削減し、収集した情報から条件に合う設定ファイルを選択して表示することで選び易くする。
(もっと読む)
移動ロボットおよび移動ロボットにおける画像補正方法
【課題】煩雑な操作を行うことなく高精度のキャリブレーションを行うことのできる移動ロボットを提供する。
【解決手段】移動可能な移動ロボット10であって、観察対象となる対象物を撮影する際の撮影状況と、当該撮影状況において撮影された撮影画像を補正するための画像補正情報とを対応付けて保持する補正情報保持手段140と、所定の位置において対象物を撮影する撮影手段100と、撮影時の状況であって、対象物の画像に影響を与える撮影状況を特定する撮影状況特定手段114と、補正情報保持手段140において撮影状況特定手段114が特定した撮影状況に対応付けられている補正情報を抽出する補正情報抽出手段115と、補正情報に基づいて、撮影画像を補正する画像補正手段118とを備えた。
(もっと読む)
群ロボットシステム
【課題】対象物の探索を効率的に行なうことが可能となる群ロボットシステム等を提供する。
【解決手段】ベースステーション101から遠い側に位置するセンシングロボット102,103,104が探索の対象物を検出した場合に、ベースステーション101に近い側に位置するセンシングロット102,103,104が探索の対象物を検出できるように、ベースステーション101が探索の対象物に向かって移動するとともに、それに伴って複数のセンシングロボット102,103,104が全体として移動する。
(もっと読む)
61 - 80 / 132
[ Back to top ]