
Fターム[3C007KS10]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業環境(例;雰囲気温度) (665)
Fターム[3C007KS10]の下位に属するFターム
作業者の位置、状態 (250)
障害物の位置、状態 (207)
他のロボット、機械の位置、状態 (76)
Fターム[3C007KS10]に分類される特許
121 - 132 / 132
ガラス搬送装置およびその使用方法
ガラス搬送装置および方法であって、ガラスシートがガラス製造設備内のある地点から別の地点へと移動される際に、ガラスシートの振動を最小限に抑えるようにガラスシートと係合しそれを保持するための強化ロボットが使用される、ガラス搬送装置および方法が本明細書に記載されている。強化ロボットは、1つ以上の吸着カップおよび1つ以上の空気力学式装置を使用することによって、ガラスシートと係合しそれを保持する。吸着カップは、ガラスシートが移動される際に、ガラスシートの外側縁部または非品質領域と接触してそれを支持する。また、空気力学式装置は、ガラスシートが移動される際に、ガラスシートと接触せずに空気力学式装置がガラスシートの品質領域を支持および保持できるように、ガラスシートの中央部分または品質領域に向かってガスを放出する。該装置はまた、空気力学式装置から放出されるガスの温度がガラスシートの温度と実質的に一致するように、空気力学式装置からガラスシートに向かって放出されるガスの温度を調節するための温度制御装置を使用してもよい。 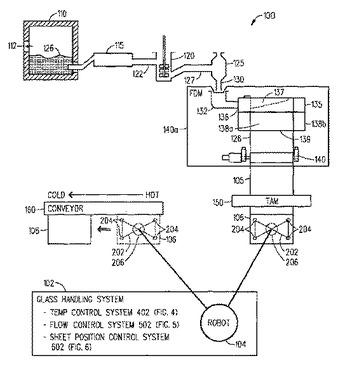 (もっと読む)
(もっと読む)
移動ロボット

【課題】ロボット本体ユニットに複数の車輪ユニットを取り付けて走行面上を移動及び/又は旋回する移動ロボットにおいて、簡単な構造で人体を検出する。
【解決手段】ロボット本体ユニット20に複数の車輪ユニット51〜53を取り付けて走行面2上を移動及び/又は旋回する移動ロボット1において、ロボット本体ユニット20の全周囲に亘って人体の有無を検出する第1のセンサ(焦電型赤外線センサ)27と、人体を検出した時に人体の方向を特定する第2のセンサ(サーモパイル)28と、人体までの距離を測定する第3のセンサ(距離センサ)22とをロボット筐体21に取り付けたことを特徴とする移動ロボット1を提供する。
(もっと読む)
移動ロボットの制御装置

【課題】不特定多数の人間が移動する環境下でも、移動する人間と衝突せずに円滑に移動することのできる移動ロボットの制御装置を提供する。
【解決手段】環境情報取得手段(ビデオカメラ3やマイクロフォン4)と、現在位置検出手段(15)と、移動領域内の通路や固定物の配置に関わる情報を記述した地図管理手段(7)とを備え、移動領域内の環境情報を参照しつつ自律的に移動するロボット(1)の制御装置において、環境情報取得手段が認識した対向者と自身との位置関係に基づいてそのままの進路をとると対向者との衝突可能性大と判断された場合は、合図(方向指示灯16)を発して進路を右側へ変更し、且つその衝突回避行動が対向者に伝わったことを確認するものとする。
(もっと読む)
自律走行ロボット
【課題】 作業環境中に配置した標識を利用して、走行する経路によらず自己位置推定の誤差を補正できる自律走行ロボットを提供すること。
【解決手段】 本体を走行させる走行手段8a,8b,9a,9bと、作業環境中の本体位置を推定する自己位置推定手段22と、作業環境中の標識位置を記憶する地図記憶手段23と、作業領域中の標識を認識する標識認識手段3bと、壁に沿ってならい走行中に壁際に配置された標識を標識認識手段で認識した際に、前記地図中の本体位置に前記地図記憶手段に記憶されている標識位置を代入することにより自己位置推定の誤差を補正する誤差補正手段S4とを具備したことを特徴とする。
(もっと読む)
ロボット
【課題】 従来、ロボット本体に分離可能に接続される分体部を備えたロボットでは、分体部がロボット本体の制御装置としての機能を有しているにすぎず、ユーザとコミュニケーションを行ったり、心理的なつながり感を得ることができなかった。
【解決手段】 分体部50は、ロボット本体10から分離した状態にあるときにロボット本体10のイメージ画像PをLCDパネル51に表示させる。また、分体部50は、マイク52、カメラ53、操作ボタン55〜57等で入力された情報に基づいてメモリ66が記憶した性格・経験等の状態データを改変すると共に、入力情報及び状態データに応じた音声をマイク54から出力する。
(もっと読む)
ロボットシステムおよび自律走行ロボット
本発明は、自律走行ロボットを含むロボットシステムおよび自律走行ロボットに関し、自律走行ロボットを所定の経路に沿って移動させて監視するシステムにおいて、画像等の送信を要求してから入手するまでの時間を短縮する。自律走行ロボットが所定のタイミングに達するたびに所定の経路に沿って移動し、その所定の経路に沿って移動している途中、所定位置に達するたびにカメラに撮影を行なわさせ、カメラでの撮影により得られた画像を記憶しておき、携帯電話等からの送信依頼を受けて、記憶された画像を送信依頼元の携帯電話等に送信する。  (もっと読む)
(もっと読む)
アーク溶接ロボット
【課題】溶接した部材の目視検査により溶接品質管理には限界があり、また汎用計測器を使用した溶接品質管理でも十分なデータ収集ができず、またコスト増加となる。
【解決手段】本発明のアーク溶接ロボットは、予め教示された動作プログラムによって所定の動作パターンで動作し、前記動作パターンに応じて所定の溶接条件で被溶接物を溶接するアーク溶接ロボットであって、前記動作プログラム実行時のプログラム名、溶接箇所、計測データのうち少なくとも1つを履歴情報として保存する保存手段を備えることにより、特別な計測器を付加することなく溶接品質管理に必要な溶接に関するデータを安価にかつ高精度に収集することができる。
(もっと読む)
自走ロボット
【課題】 安価な構成で人体を追尾し撮像する。
【解決手段】 自走ロボット110は、第1センサ112〜第4センサ118と、カメラ130と、第1センサ112〜第4センサ118およびカメラ130を同時に移動させる駆動装置162と、第1センサ112〜第4センサ118およびカメラ130が停止したことを検出するロータリエンコーダ164と、熱源があることを第1センサ112〜第4センサ118のいずれか1つが検出すると、熱源を検出したセンサがあった方向にカメラ130が向くように、駆動装置162を制御し、停止後ものを撮像するように、カメラ130を制御し、停止後3秒が経過するまで、熱源を検出するか否かに関わらず、第1センサ112〜第4センサ118を固定するように駆動装置162を制御する制御部126とを含む。
(もっと読む)
監視ロボット
【課題】車などの移動体に同乗可能なロボットであって、ロボット自らが運転者の指示を認識して監視動作を行うようにした監視ロボットを提供する。
【解決手段】音声認識および画像認識の処理結果に基づいて運転者の指示を認識し(S10からS14)、認識された指示に応じてCCDカメラの撮影方向を指示し(S16)、画像認識処理結果に基づいて監視結果を判断し(S18)、認識された指示および判断された監視結果の少なくともいずれかに基づいてディスプレイによる報知、スピーカを通じての音声による報知、ロボット構成部位の駆動からなる、所定の報知動作群の中のいずれかを選択し(S20)、選択された報知動作に従って監視結果を運転者に報知する(S22)。
(もっと読む)
自律走行ロボット
【課題】作業領域別に異なる作業内容が指示でき、1つの作業領域に複数の作業内容が指示でき、しかも、作業内容を指定して所定の作業位置へ自律走行ができる。
【解決手段】赤外線信号を赤外線受信器4が受信すると、受信信号を解析し、走行コマンドであることを認識すると、走行コマンドに応じた走行制御を行う。そして、自己位置計測手段が逐次自己位置を計測する。登録コマンドが作業位置の登録コマンドであることを判断すると、自己位置計測手段が取得した現在の自己位置を作業位置情報として位置情報記憶手段により記憶部へ記憶する。また、作業内容の登録コマンドを受信したことを認識すると、登録コマンドに該当する作業内容を作業内容記憶手段により記憶部に記憶する。記憶部に登録した作業内容を選択すると、この選択した作業内容に対応した作業位置情報に基づいて所定の位置に案内し、この位置にて登録した作業内容を実行する。
(もっと読む)
監視システム、その方法、監視ロボットおよびプログラム
【課題】 監視ポイントにおけるセンサによる測定情報の時系列変移を管理することができる監視システム、その方法、監視ロボットおよびプログラムを提供する。
【解決手段】 測定ロボット10は、任意の方向へ可動なセンサによって測定した数値をまとめた変移情報をネットワーク50を介して顧客端末20に対して送信し、顧客端末20はその変移情報を画面に表示する。
(もっと読む)
視覚情報処理装置および適用システム
【課題】
アズビルト3D−CADデータをリアルタイムで自動生成して利用することができる視覚情報処理装置及びその応用システムを提供する。
【解決手段】
移動可能な撮像装置の画像情報を入力とし、入力画像を処理して移動空間に存在する物体のCADデータを自動的に生成する機能と自動的に更新する機能を持たせる。また、CADデータの探索指令信号を入力とし、その指令信号に基づきCADデータを探索する機能と、探索したCADデータの情報を出力する機能を持たせる。更に、その視覚情報処理装置をロボット制御装置などと組み合わせて自律制御型の各種自動機械を構成する。
(もっと読む)
121 - 132 / 132
[ Back to top ]