
Fターム[3C007KS13]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業環境(例;雰囲気温度) (665) | 他のロボット、機械の位置、状態 (76)
Fターム[3C007KS13]に分類される特許
1 - 20 / 76
ロボットシステムおよびそれに用いる空間陣形認識装置
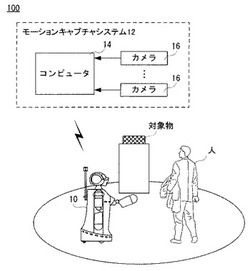
【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
清掃ロボットシステム及びその制御方法

【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
干渉チェック方法及びロボット制御装置
【課題】ロボットアームと部品給材装置との干渉の有無を確実に発見する手段を提供する。
【解決手段】1方向に動作するロボットアーム100の移動方向と速さとを定めたベクトルデータであるロボットアーム並進速度データと、1方向に動作するワーク搬送装置の移動方向と速さとを定めるベクトルデータである部品給材装置200の並進速度データとから計算される相対速度データに基づく拡大処理から得られる拡大済み干渉ボリュームデータを生成する。拡大済み干渉ボリュームデータと、ロボットアーム100の形状データあるいは部品給材装置200の形状データとを、ロボットアームの位置姿勢データ及び部品給材装置200の位置姿勢データに従って、ロボットアーム100と部品給材装置が干渉の有無を確認する交差判定計算を行い、干渉の有無を判断する。
(もっと読む)
真空ピンセットおよび真空吸着方法
【課題】手作業による操作ミスがあったとしても被処理体の吸着ミスを防止し、確実に吸着・脱着動作を行うことが可能な真空ピンセットを提供する。
【解決手段】本発明の真空ピンセットは、長尺状の本体2と、前記本体の一端部に設けられ、平板状の被処理体を吸着し保持する第一機能部10、および、前記被処理体とは異なる対象物の有無を識別する第二機能部20と、を少なくとも備えた真空ピンセット1A(1)であって、前記第二機能部における前記対象物の有無の識別結果に基づき、前記第一機能部における前記被処理体の吸着条件を切り替える制御手段30を有すること、を特徴とする。
(もっと読む)
ロボットシステム
【課題】自走式のロボットを適用して、被検者である人間に対して所定の処置を確実にかつ低コストで行うことができるロボットシステムを提供する。
【解決手段】移動可能なロボット100と、シート状に形成され、上面における被検者200の位置および姿勢を検出するシートセンサ10と、シートセンサ10に設けられ、シートセンサ10により検出された被検者200の位置および姿勢に関する情報、ならびに、シートセンサ10の位置および向きに関する情報を送信する第一,第二送信部23,32と、ロボット100に設けられ、第一,第二送信部23,32により送信される情報を受信する受信部111と、ロボット100に設けられ、受信部111により受信した情報に基づいて、ロボット100が被検者200に対する所定の処置を行うようにロボット100を制御するロボット制御部112を備える。
(もっと読む)
ロボット及びその制御方法
【課題】簡易な構成により作業時の安定性を確保できるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、ロボット本体11、アーム12、台車13、センサ14を備える。アーム12は、ロボット本体11に連結され、関節機構及び伸縮機構のうち少なくともいずれか一方を有する。センサ14は、ロボット本体11の周囲に存在する物体を検知する。ロボット1は、アーム12が稼働する場合、台車13によりセンサ14が検知した物体に接近し、ロボット本体11の一部を当該物体に当接させる。
(もっと読む)
グローブボックス、密閉空間作業システム、制御プログラム、グローブ装着検知装置、及び作業機器
【課題】作業機器を設けた作業空間で作業者がグローブを用いて作業を行う場合に、煩雑さを低減させることが可能なグローブボックスを提供する。
【解決手段】グローブボックスの一例であるアイソレータ1は、少なくとも壁面により密閉された作業空間Sを形成するケース3と、ケース3壁面から作業空間Sに向かって延びる形で設けられたグローブ5と、グローブ5への作業者の手の装着状態を検知するグローブ装着状態検知部7と、グローブ装着状態検知部7からの装着情報を、この装着情報に基づき作業空間Sに設けられた作業空間Sで作業を行うために使用される搬送ロボット20を制御する主制御部40に繋がる装着信号受信部40Rへ送信する装着信号送信部7Sと、を備える。これにより、グローブ5の装着情報に基づいて搬送ロボット20が制御され、搬送ロボット20の動作に対する入力操作の煩わしさや操作ミスが低減される。
(もっと読む)
操作入力装置およびマニピュレータシステム
【課題】操作者が操作部を正常に操作できない状態となったときにそれを迅速に検知し、表示物の意図しない動きを防ぐ。
【解決手段】ディスプレイ4と、操作者Bの頭部Cに装着される頭部装着部5と、操作者Bの操作によりディスプレイ4上に表示された表示物2に対する操作信号が入力される操作部6と、頭部装着部5と操作部6との相対位置を検出する相対位置検出手段8,12と、該相対位置検出手段8,12によって検出された相対位置に基づいて、操作部6に入力された操作信号に従って表示物2の動作を制御する第1の制御モードと、操作部6に入力された操作信号に対して制限をかけて表示物2の動作を制御する第2の制御モードとを切り替えて表示物2を制御する制御部7とを備える操作入力装置1を提供する。
(もっと読む)
ユーザ支援システム
【課題】ユーザによる機器の操作を適切に支援すること。
【解決手段】ユーザ支援システムは、ユーザが操作する機器と、上記ユーザによる上記機器の操作を支援する処理を実行する支援装置と、上記ユーザの位置と姿勢を表すユーザ情報を取得するユーザ情報取得手段と、上記機器の位置と姿勢を表す機器情報を取得する機器情報取得手段と、上記機器の作動状態を表す作動状態情報を取得する作動状態情報取得手段と、を備え、上記支援装置は、支援装置自体の位置と姿勢のうち少なくとも一方が変化するよう可動する可動部を有している。さらに、上記ユーザ支援システムは、上記作動状態情報の履歴の変化に応じて、上記ユーザ情報と上記機器情報に基づいて上記支援装置による上記ユーザに対する支援処理が実行可能となるよう上記可動部の動作を制御すると共に、上記支援装置による支援処理を実行するよう制御する支援装置制御手段を備えた。
(もっと読む)
センサ位置姿勢計測方法
【課題】主センサ手段と補助センサ手段を用いて作業対象物に対する正確な計測を行う。
【解決手段】マニピュレータ2によりオンハンドカメラ3を移動し、オンハンドカメラ3より得られた画像情報を用いてグローバルカメラ6の三次元位置及び姿勢を計測するように構成し、作業対象物Wに対する作業を行うのに先立ち、オンハンドカメラ3によりグローバルカメラ6の位置及び姿勢を計測する。
(もっと読む)
ロボット制御装置、ロボット制御システム及びロボット制御方法
【課題】複数のロボットの協調動作における各ロボット制御装置間の同期を精度良く確立する。
【解決手段】複数のロボット4−1〜4−3と、各ロボットを制御する複数のロボット制御装置2、3−1、2とを用い、ロボット制御装置毎に設定される制御周期に同期させて各ロボットを協調動作させるシステムのロボット制御装置であって、マスタ側のロボット制御装置2の制御周期における所定のタイミングで生成された同期信号の入力タイミングと、スレーブ側のロボット制御装置3−1、2の制御周期における所定のタイミングで生成された保持信号の入力タイミングとを検出するタイミング検出部32と、保持信号の出力から所定期間経過後に同期信号と保持信号の各入力タイミングのタイミング差を読み込み、それ基づいてスレーブ側のロボット制御装置3−1、2の制御周期を変化させる制御部31とを備えている。
(もっと読む)
移動体及び移動体の教示方法
【課題】教示作業を効率化するとともに、移動体の走行位置精度を向上することができるようにした、移動体及び移動体の教示方法を提供する。
【解決手段】車体1を走行させる走行装置4と、走行装置4を制御する制御装置3と、車体1の前方向を撮像する第1カメラ6と、車体1の後方向を撮像する第2カメラ7と、を有して構成し、制御装置3は、予め設定された車体の走行経路上の複数の教示地点のそれぞれにおいて、第1カメラ6及び第2カメラ7によって画像を取得し、それぞれ取得した画像を教示画像として記憶する教示画像取得部21と、第1カメラ6によりリアルタイムに撮像された撮像画像と、教示画像取得部21により予め取得された教示画像との比較結果に基づいて走行装置3を制御する走行制御部22とを有する。
(もっと読む)
組立装置
【課題】移動操作精度を向上させず、凸部の凹部への挿入を短時間で完了でき、ロボットアームの可搬重量や可動範囲が制限されない組立装置を提供する。
【解決手段】凹部を有する部品101を把持して凹部103に凸部を有する部品102の凸部を挿入させるロボットアーム1と、凸部を有する部品102を保持する保持台4と、保持台4に設けられロボットアーム1が凹部103に凸部を有する部品102を挿入させるとき凹部を有する部品101又は凸部を有する部品102が受けるモーメントを検出する力覚センサ2と、保持台4を移動操作するアクチュエータ5aと、保持台4を挿入方向に直交する方向に移動可能に支持する受動機構5bとを備え、凹部103に凸部を有する部品102を挿入させるとき、保持台4に固定された部品が受ける挿入方向の並進力により受動機構5bが変位し、検出されたモーメントに基づきアクチュエータ5aにより保持台4を移動操作する。
(もっと読む)
組立装置
【課題】部材の移動操作の精度を特段に向上させる必要を生ずることなく、凸部を有する部材の凹部への挿入を短時間で完了することができ、さらに、ロボットアームの可搬重量や可動範囲が制限されることのない組立装置を提供する。
【解決手段】凹部を有する部品101または凸部を有する部品102を把持して移動操作し凹部103に凸部を有する部品102の凸部を挿入させるロボットアーム1と、凸部を有する部品102または凹部を有する部品101を保持する保持台4と、保持台4を挿入方向に直交する方向及び/又は挿入方向に直交する軸周りの回転方向に移動可能に支持する受動機構5とを備え、ロボットアーム1が凹部103に凸部を挿入させようとしたときに、保持台4に固定された部材が受ける挿入方向の並進力及び/又はこれに直交する軸周りのモーメントにより受動機構5が変位され、凸部を有する部品102の凸部が凹部103に挿入される。
(もっと読む)
工作機械と組み合わせて使用するロボットの制御装置
【課題】熟練度を必要とすることなしに且つ立上げの工数を増やすことなしに、工作機械およびロボットの立上げ作業を簡易かつ容易に行う。
【解決手段】工作機械(5、6)と組み合わせて使用するロボット(1)を制御するロボット制御装置(7)は、ロボット制御装置を工作機械に接続する通信部(9)と、通信部を介して工作機械の種類および数を検出する検出部(52)と、検出部により検出された工作機械の種類および数に基づいてロボット制御装を設定する設定部(55)と、を含む。設定部は、検出部により検出された工作機械の種類および数に基づいて、ロボット制御装置に格納されたロボット制御装置のための複数の設定ファイルから一つの設定ファイルを選択するようにした。
(もっと読む)
ロボット、ロボットの駆動制御方法
【課題】ロボット間の干渉や衝突を防止する。
【解決手段】駆動プログラムに従って駆動させるロボットの駆動制御方法であって、前記駆動プログラムに従って前記ロボットを駆動させ、前記ロボットの駆動状況を検出するとともに、検出した駆動状況を駆動状況データーとして記録し、前記駆動状況データーに基づいて、前記駆動プログラムを更新し、前記更新された駆動プログラムに従って前記ロボットを駆動させる。
(もっと読む)
ロボット連携システム、ロボット連携方法及びプログラム
【課題】サービス提供エリアの混雑状況及びユーザごとの重要度を考慮してロボット間でサービスの引継ぎを行えるようにする。
【解決手段】引継方式決定制御プログラム132に従い、位置情報データベース143に記憶された各ユーザの最新の位置座標データをもとにサービスを受けていないユーザ数をカウントし、このユーザ数とサービス提供中のユーザU1の重要度mとをもとに、サービス種別SS1〜SS3に対応して予め用意された境界関数の計算式に従い境界関数を計算する。そして上記計算された境界関数の値がf>0であるか、f≦0であるかを判定し、f>0の場合に「指示方式」を、f≦0の場合には「アテンド方式」を選択する。また、引継ポイント決定制御プログラム133に従い、「指示方式」が選択された場合と、「アテンド方式」が選択された場合とで、異なるアルゴリズムで引継ポイントを決定する。
(もっと読む)
移動装置
【課題】物体による移動の妨げを効率的に回避する観点から適当に移動または行動しうる移動装置を提供する。
【解決手段】第1移動条件が満たされていないものの、第2移動条件が満たされており、かつ、物体2が第1分類に属すると判定された場合、物体2に第1態様または任意態様にしたがった移動を促すようにロボット1の動作が制御される。「第2移動条件」は、物体2が第1態様にしたがって変位することにより、ロボット1が現状の目標位置軌道P0にしたがってこの物体2に妨げられずに移動することができるという条件である。「第1分類」はロボット1の行動態様を認識することができ、かつ、自律的に移動することができる人間、他のロボット等の物体の分類を意味する。このようにロボット1の促し動作に応じて物体を自律的2に変位させることにより、ロボット1が現状の目標位置軌道P0にしたがってこの物体2に妨げられずに移動することができることが事前確認される。
(もっと読む)
自動運転装置
【課題】運転対象の設備に対して短期間で連携して動作させることが可能な自動運転装置を提供する。
【解決手段】自動運転装置(1)は、設備(2)に対して相対的に移動可能であり、設備(2)に所定の動作をさせる少なくとも一つの操作スイッチ(22)を操作可能なマニピュレータ(12)と、各動作段階のうち何れの動作段階にあるかを示す表示部(21)を撮影した画像を一定時間間隔で取得する撮像部(11)と、画像から表示部(21)の表示内容を認識することにより、設備(2)の動作段階を識別する動作段階識別部(31)と、動作段階識別部(31)によって識別された設備(2)の動作段階に応じた動作を設備(2)に実行させるように、マニピュレータを動作させて少なくとも一つの操作スイッチ(22)を操作する制御部(33)とを有する。
(もっと読む)
救援ロボットシステム、救援方法及び救援ロボット
【課題】
自律移動ロボットが自己位置の推定に失敗した場合、管理者による操作・介入によるリカバリでは管理者の場所への移動、救援リカバリのタイミングに問題がある。また、リカバリを高性能制御装置、ロボットのCPUの処理量及びメモリ使用量を少なくして救援リカバリを行う必要がある。
【解決手段】
管理サーバが自律移動ロボットのロボット情報を保持し、定期的に自律移動ロボットから位置情報を取得し、自律移動ロボットから救援の通知を受けた場合に配下のロボットに救援を指示し、救援指示を受けた救援ロボットは該当ロボットの探索を行い、被救援ロボットとの相対位置より被救援ロボットの絶対位置と方位を算出して被救援ロボットのリカバリを行う。
(もっと読む)
1 - 20 / 76
[ Back to top ]