
Fターム[3C007KS10]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業環境(例;雰囲気温度) (665)
Fターム[3C007KS10]の下位に属するFターム
作業者の位置、状態 (250)
障害物の位置、状態 (207)
他のロボット、機械の位置、状態 (76)
Fターム[3C007KS10]に分類される特許
101 - 120 / 132
自走式ロボット
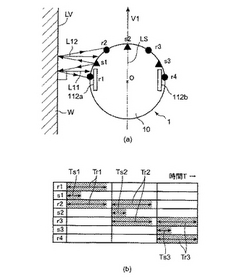
【課題】 自走式ロボットの周囲の障害物を正確に検出する。
【解決手段】 進行方向V1に対して、超音波発信器s2を中心として、等間隔に、3台の超音波発信器と4台の超音波受信器とが交互に配設されている。ここでは、進行方向V1に向かって左側から、超音波受信器r1、超音波発信器s1、超音波受信器r2、超音波発信器s2、超音波受信器r3、超音波発信器s3、超音波受信器r4の順に配設されている。また、本体部10の中心点Oを通り、進行方向V1に平行な直線である中心線LSについて、3台の超音波発信器と4台の超音波受信器とが線対称な位置に配設されている。
(もっと読む)
自律移動ロボット及びその移動状況記録システム

【課題】 自律移動ロボットの客観的な移動状況を記録することができる自律移動ロボットの移動状況記録方法を提供する。
【解決手段】 自律移動ロボット1の周囲に存在する障害物の有無を検出可能なセンシング手段2と、自律移動ロボット1の移動する範囲内の地図を記憶する記憶手段3と、自律移動ロボット1が移動するための移動機構4と、移動機構4を制御する制御部5と、制御部5が正常に動作しているか否かを監視する動作監視部6と、動作監視部6によって制御部5の動作が異常であると判断した場合に移動機構4への電源供給を遮断する電源供給遮断手段7と、自律移動ロボット1の周囲の状況を撮像する撮像手段8と、撮像手段8で撮像された画像を記録する画像記録手段9とを自律移動ロボット1に備える。撮像手段8により撮像された画像を画像記録手段9に連続的に記録する。
(もっと読む)
ロボットおよびロボットの異常検出方法
【課題】
ロボットの異常検出方法において、ロボットの異常をその初期段階で高精度に検出することができるようにする。
【解決手段】
ロボット本体8の関節部について、ロボットアーム1の固有振動数を測定しておき、駆動モータ3および減速機2で発生する振動によって最もロボットアーム1が共振する動作速度での定速動作をロボット本体8の異常検出の動作条件とし、駆動モータあるいは減速機に設置した温度センサを用いて温度補正を行ったモータトルク値から算出したトルク変動値が、あらかじめ設定した閾値を超えた場合に、ロボット本体8に異常が発生したと判断する。
(もっと読む)
走行式作業用ロボット
【課題】常に部屋の大きさに応じた作業時間を設定して自律走行作業を実行し、大きさの異なる各種部屋に対して柔軟に対処する。
【解決手段】手動掃除時には手動操作用吸引機構が取り付けられ、自動掃除時には自動用吸引機構が取り付けられ、車輪で走行するロボット本体を使用し、ある部屋においてロボット本体を手動操作して掃除を行い、そのときの手動掃除時間を計測して記憶し、その後、その部屋を自動掃除する時には記憶してある手動掃除時間に基づいて自動掃除時間を求める。そして、ロボット本体は設定された自律掃除時間に基づいて部屋内を自律走行しつつ掃除を実行する。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット10は赤外線照射装置100および赤外反射光計測用カメラ102を用いて、コミュニケーション相手である人間の視線を検出する。ロボット10は検出結果により人間の視線がロボット10の方を向いていないと判断すれば、人間の視線をロボット10の方に向けさせる行動を取る。
【効果】 ロボット10は人間の視線に応じた自然な働きかけを人間にすることができる。
(もっと読む)
ロボット装置、ロボット装置の旋回方法、及び、プログラム
【課題】ロボット装置の移動機構と床面との摩擦やすべりなどの外的な影響を補正しつつ、正確に指令値分だけ回転駆動することのできるロボット装置の提供。
【解決手段】
ロボット装置は、床101上を移動可能で、回転可能な移動部4と、床と並行に移動部4に対し回転可能なカメラ13を持った本体2とを備える。
ロボット装置は、その場である角度分旋回する要求を受けると、カメラ13で撮影し撮影内容を基本画像として記憶する。移動部4は要求された旋回方向へ、本体部は要求された方向とは逆の方向へ、等速で回転を開始する。回転を開始するとカメラ13で撮影を行って、順次記憶した基本画像と比較し、左右のずれを確認する。そのずれを補正する方向へ移動部4または本体2へ回転速度を加えることにより、ずれを無くすようにする。そして、移動部4に対する本体2の回転角度が前記ある角度になったとき、回転動作を終了する。
(もっと読む)
コミュニケーションロボット
【構成】 サーバ100はコミュニケーションロボット12の位置を赤外線カメラシステム112から入力される座標データから検出し、その位置を中心とした一定範囲内にある騒音計114で騒音レベルを測定する。そして、ロボット12はその騒音レベルから周囲の混雑度を把握して、ロボット12の移動方向や移動距離などを求め、ロボット12は移動する。
【効果】 ロボット12に個性を持たせる、あるいは周囲の混雑度に応じた行動を人間に対して実行させることができる。
(もっと読む)
歩行ロボット装置
【課題】 路面状態が変化する場所での歩行であっても、バランスを崩したり、転倒したりする危険性が低く、より安全な歩行を行うことができるロボット装置を提供する。
【解決手段】 歩容信号に基づいて駆動機構18を駆動することにより歩容信号に対応した歩行動作を行わせる歩行ロボット装置10であって、歩行しようとする路面に関する情報を事前に検出する事前路面検出部31と、事前路面検出部31により検出された路面に関する情報に基づいて歩行しようとする路面の状況を把握する路面状況判別部32と、ロボット装置の姿勢情報を検出する姿勢検出部33と、姿勢検出部33により検出された姿勢情報に基づいて現在のロボット装置の姿勢を把握する姿勢判別部34とを備え、歩容生成部35は、歩行しようとする路面の状況と現在の姿勢とに基づいて、歩容信号を生成する。
(もっと読む)
清掃ロボット
【課題】床面や周囲環境の状況に応じて清掃部を制御し、きめ細かな清掃を行うことができる清掃ロボットを提供することにある。
【解決手段】制御部20はレーザーレーダー12,超音波センサ13、距離画像カメラ14で取得する環境情報及び清掃対象域の地図情報に基づいて清掃部のサイドブラシ4やメインブラシ5の回転や高さ位置を制御したり、フラップー7の開閉時間間隔や開閉量を制御するとともに、駆動輪2及び偏心キャスタ3による走行を制御する。
(もっと読む)
自律移動ロボットの移動経路生成装置
【課題】指定された目的地へ移動する際の情報処理を簡略化し得る自律移動ロボットの移動経路生成装置を提供する。
【解決手段】ロボットの移動領域内における経由候補点としてのノードの位置及び障害物の位置に関わる情報を記述した地図データ7と、ノード同士を所定の基準に基づいて互いに結ぶロボットが通行するべき直線としてのエッジを設定するエッジ設定処理部11aと、地図上でのロボットの現在位置を出力する現在位置検出部15と、ロボットの目的地を地図上にオペレータが入力するユーザ端末13と、設定されたエッジ同士を接続して現在位置から目的地に至る経路を算出するための経路演算処理部11bとを有する自律移動ロボットの移動経路生成装置において、各ノードから所定の距離内にあり且つ途中に障害物がないノードに対してのみエッジが設定されるものとする。
(もっと読む)
人間型ロボットの冷却構造
【課題】 電力消費の削減や冷却性能の向上、騒音の低減等を図った人間型ロボットの冷却構造を提供する。
【解決手段】 電装品ボックス6には、左側面に第1電装品ボックス側排気口45と第2電装品ボックス側排気口46とが前後にならんで形成され、右側面に第1電装品ボックス側吸気口47と第2電装品ボックス側吸気口48とが前後にならんで形成されている。両排気口45,46と両吸気口47,48は、ともに斜め後方に開口する5条のスリットからなっている。両排気口45,46は、その内側にプロペラ式の電装品ボックス側排気ファン49を備えている。
(もっと読む)
移動ロボット、移動ロボット制御方法および移動ロボット制御プログラム
【課題】移動の目印として適切なランドマークを利用することにより、精度よくかつ効率的に自己位置を特定することのできる移動ロボットを提供する。
【解決手段】ランドマークに基づいて移動する移動ロボット1であって、移動した先のロボット位置において、ランドマーク候補を検出するランドマーク候補検出手段112と、ランドマーク候補に対する至ランドマーク距離を特定する至ランドマーク距離特定手段114と、至ランドマーク距離に基づいて、ランドマーク候補に対する適切性評価値を算出する適切性評価値算出手段114と、ランドマーク候補の適切性評価値と、ランドマーク格納手段103において登録ランドマーク対応付けて格納されている適切性評価値とに基づいてロボット位置を特定するロボット位置特定手段118とを備えた。
(もっと読む)
ロボットの過電流防止装置
【課題】電流が検出されたとき、電装システムを保護しつつ、状況の如何に関わらず、ロボットの機能停止あるいはその姿勢が不安定となるのを回避するようにしたロボットの過電流防止装置を提供する。
【解決手段】電源回路7aに介挿され、オフするとき、電源回路7aを遮断して駆動回路72への通電を停止するFET80aと、電動モータに通電される電流に応じた出力を生じる電流センサ80bと、電流センサの出力V1をしきい値Vaと比較し、電流センサの出力がしきい値を超えるとき、第1の所定時間(T2)、スイッチング素子をオン/オフさせるスイッチング動作を実行して電源回路を断続的に遮断する過電流抑制手段(コンパレータ80c、第1、第2の遅延回路80d,80e、EX−OR回路80f、AND回路80g、発振器80h、バッファ80i,AND回路80j、絶縁ゲートドライバ80k、ラッチ回路80l,ECU70)を備える。
(もっと読む)
移動ロボットの動き追跡装置及びその動き追跡方法
【課題】 特定物体の動きを追跡するために画素を比較する演算量を画期的に減少させることができると共に、前記特定物体の四方に対する動きを効率的に感知し得る移動ロボットの動き追跡装置及びその方法を提供することにある。
【解決手段】 移動ロボットの動き追跡装置は、 特定物体を撮影するカメラと、前記カメラによって撮影された特定物体の現在映像に基準領域を設定し、且つ前記基準領域が設定された現在映像を生成する動き追跡映像生成部と、前記現在映像の基準領域の枠の画素と以前映像の基準領域の枠の画素の差映像を抽出する差映像抽出部と、前記抽出された差映像に基づいて、前記特定物体の動きを追跡するマイクロコンピュータと、から構成される。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボットは、全身に分散配置された複数の触覚センサを含み、そのCPUは、ステップS3で、人間の触行動に伴う触覚センサの出力ベクトルをクラスタリングしてクラスタ核を抽出し、ステップS7で、そのクラスタ核を代表的なそれぞれの触り方に対応付けて、クラスタ核の遷移データを作成し、ステップS9でDPマッチングによって遷移データどうしの距離を求め、ステップS11で、その距離に従って階層的クラスタリングを行ない、樹状図を作成する。
【効果】 樹状図の上位クラスタが部位を、下位クラスタが触られ方を示すので、樹状図を参照すれば、どこをどのように触られているか、つまり人間による「触り方」が判別できる。
(もっと読む)
コミュニケーションロボット用開発支援装置および開発支援プログラム
【構成】コミュニケーションロボット用開発支援装置では、自律行動するコミュニケーションロボットと人間とのインタラクション時の各種センサ出力、実行した行動と結果、音声認識結果などを記録したインタラクションデータから、検索条件を満足する対話場面を抽出する。その対話場面における各種センサ出力に基づいて把握される状況や、実行した行動の履歴や結果、音声認識結果などを視覚化して、そのインタラクションを事後にシーン表示画面114上で再現する。また、シーン表示画面114における表示を、使用者による時刻指定に従って切り替える。
【効果】ロボットの自律行動に含まれる問題点を簡単に見出すことができる。
(もっと読む)
レーザを利用したプラント内の点検・補修方法およびそれを行うロボット
【課題】 機器や配管から漏洩するガスが微少であってもそのガスが漏洩する箇所を特定することができ、さらに、ガスの漏洩箇所の補修を行うことができるレーザを利用したプラント内の点検・補修を行うロボットを提供することにある。
【解決手段】 前進及び後進並びに旋回を行う車輪6を複数備えた台車7と、台車7に搭載され、レーザを照射することにより機器や配管からもガスの漏れを検知するレーザ装置8と、台車7内に搭載され、レーザ装置8により検知されたガスの漏れの濃度分布を計測する濃度分布計測装置と、台車7内に搭載され、前記濃度分布計測装置によりガスの濃度が最も高い箇所を損傷箇所と特定する損傷箇所特定装置とを有し、レーザ装置8には、前記損傷箇所特定装置により特定された損傷箇所に上記レーザと異なるレーザを照射して補修する機能をさらに備えたことで、機器や配管から微少のガスが漏洩してもそのガスの漏洩箇所を特定することができ、さらに、ガスの漏洩箇所の補修を行うことができるようにした。
(もっと読む)
無人搬送設備
【課題】 本発明は、実際に物品の搬送を行うとともに、稼動時間以外では巡回、監視する無人搬送車を備えた無人搬送設備を提供することを目的とする。
【解決手段】 工場や物流設備等の施設において、ステーション1間の物品の搬送に使用される無人搬送車3に、監視カメラ24と誘導路4の周囲の異常を検出する炎検知センサ18および人感センサ19a〜19dとを設けることにより誘導路4の周囲の監視を行う機能を付加し、巡回・監視中に、異常が検出されると、外部の携帯電話42に接続して、統括コントローラ35により検出されている無人搬送車3の位置座標と監視カメラ24により撮像されている画像データを送信し、携帯電話42に表示させる構成とする。この構成によれば、無人搬送車3を巡回・監視用ロボットとして兼用でき、異常発生時に、携帯電話42を呼び出して、異常が発生している周囲の状況、発生位置を報知することができる。
(もっと読む)
巡回ロボットおよび巡回方法
【課題】空間を構成するサブ空間のセキュリティ評価を行い、最適化した巡回経路で巡回する巡回ロボットおよび巡回方法を得る。
【解決手段】巡回動作中に、サブ空間停留時間率評価部5に対して、侵入リスクを動的パラメータと固定パラメータによって入力し、動的パラメータの変化を検出して、サブ空間での停留時間率の再計算を行う。再計算された停留時間率に基づき、経路プランを再プランニングし、実行する。
(もっと読む)
医療用遠隔操作ロボット・システム
遠隔制御ロボットを備えるロボット・システム。ロボットは、カメラ、モニタ、ホロノーム・プラットフォームを備え、すべてハウジングに取り付けられている。ロボットを、カメラとモニタを備える遠隔制御ステーションにより制御することができる。遠隔制御ステーションはロボットに無線で結合されているベース・ステーションにリンクしている。遠隔地にいる介護者は、ロボットを通じてカメラとモニタにより患者を監視し、世話をすることができる。ホロノーム・プラットフォームを使用することにより、ロボットは家庭または施設内を動き回り、患者を特定し、かつ/または患者に追随することができる。 (もっと読む)
101 - 120 / 132
[ Back to top ]