
Fターム[3C007KS10]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業環境(例;雰囲気温度) (665)
Fターム[3C007KS10]の下位に属するFターム
作業者の位置、状態 (250)
障害物の位置、状態 (207)
他のロボット、機械の位置、状態 (76)
Fターム[3C007KS10]に分類される特許
81 - 100 / 132
移動型ロボット
【課題】体幹に備えられているカメラとは別のカメラを関節を介して体幹に接続された接続部位に設けることで、ロボットの作動時に接続部位などの体の一部が視界に入ることで生じる未知環境をなくし、常時周囲の環境全域を認識できる技術を提供する。
【解決手段】本発明におけるロボットは、頭部および胴体からなる体幹103と、駆動する肩関節203を介して体幹103に接続された少なくとも一本の接続部位104と、体幹に少なくとも1つ設けられている体幹側カメラ105と、接続部位に少なくとも1つ設けられている接続部位側カメラ106を有している。さらに、体幹側カメラ105により撮像した体幹側画像と接続部位側カメラ106により撮像した接続部位側画像とを合成して合成画像を作成する合成画像作成手段と、合成画像より周囲物体の位置を認識する認識手段を備えている。
(もっと読む)
ロボットの移動制御方法、および移動ロボット

【課題】周囲の環境条件に応じて柔軟に移動を制御し、障害物との衝突を回避するロボットの移動制御方法、および移動ロボットを提供することを目的とする。
【解決手段】障害物との距離、および周囲の環境条件を測定し、測定結果にしたがってロボットの移動速度を制御する方法であって、それぞれ固有の測定レンジ、および対応する設定速度を有する複数の距離測定手段を用いて測定し、測定結果を、最も測定レンジの長い距離測定手段から順に評価して、周囲の環境条件が所定の条件を満たす距離測定手段の測定距離を採用し、ロボットの移動速度を、採用した距離測定手段に対応付けられた設定速度に制御することを特徴とする。
(もっと読む)
ロボット制御システム
【課題】遠隔操作の効率性や安全性を向上できるロボット制御システムを提供する。
【解決手段】ロボット制御システムは、たとえば自律制御可能なコミュニケーションロボットを遠隔操作するための操作用コンピュータおよび当該ロボットの存在する環境に設置されたセンサを含む。操作用コンピュータにはセンサ情報画面が表示される。センサ情報画面には、環境センサによって検出された情報、つまり、カメラ画像、騒音レベル、距離センサ情報等が表示される。さらに、ロボットの存在する環境の地図が表示され、当該地図上には、たとえば、環境の無線タグリーダの検出情報から算出されるロボットの現在位置とともに、環境カメラの差分画像に基づいて算出される混雑領域や、騒音計の測定情報から算出される煩い領域等、当該環境における注意情報が表示される。
(もっと読む)
ディスプレイを備えたロボット
【課題】ロボットの動作状態を人に違和感なく感覚的に伝えることができるようにする。
【解決手段】ロボットに取り付けた温度センサ2で検出した温度により、ロボットの動作速度や加速度の動作パターンを自動的に変化させ、動作パターンの補正量の大きさに応じてディスプレイ6の背景色を段階的に変化させる。また、動作コマンドなど人に直接的に伝える必要があるものは、背景色の前面に表示させる。
(もっと読む)
脚車輪型ロボット
【課題】脚車輪型ロボットの姿勢にかかわらず測定を行うのに好適な脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボットは、基体と、基体に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪と、脚部12を駆動するための動力を付与する関節モータと、脚先センサ22と、脚先センサ22の地軸に対する傾斜を検出する姿勢センサ84と、脚先センサ22の傾斜を調整するための動力を付与するモータ82と、姿勢センサ84の検出結果に基づいて脚先センサ22の地軸に対する傾斜が一定となるようにモータ82を制御する制御部86とを備える。
(もっと読む)
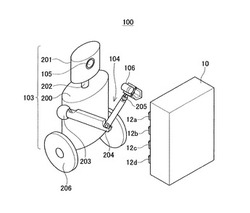
脚車輪型ロボット
【課題】未知の段差に対して高い適応性を実現することができる脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、脚部12を駆動するための動力を付与するモータと、レーザ26〜30およびカメラ32からなる画像センサと、脚先センサ22、24とを備え、カメラ32で撮影した画像および脚先センサ22、24で測定した距離に基づいて階段を認識し、その認識結果に基づいてモータを制御する。
(もっと読む)
光源位置検出装置、これを用いた顔認識装置及び自走式ロボット
【課題】光源の位置を容易に検出することができる光源位置検出装置、これを用いた顔認識装置及び自走式ロボットを提供する。
【解決手段】顔認識機能を有する自走式ロボットを、顔認識対象者を撮影する前方カメラ13(顔画像撮影装置)と、前方カメラ13の撮影画像に基づいて顔認識を行うユーザー認識部(顔認識処理部)と、制御装置51(光源位置検出装置)と、前方カメラ13による撮影条件の情報を顔認識対象者に通知する撮影条件通知部66と、周囲の複数点を撮影する全方位カメラ11(周辺状況撮影装置)と、全方位カメラ11の撮影画像に基づいて光源位置を判定する光源位置判定部65とを有する構成とする。光源位置判定部65を、全方位カメラ11の撮影画像の中での明度の高い領域を検出し、全方位カメラ11の撮影範囲のうち明度の高い領域に対応する領域を光源位置と判断する構成とする。
(もっと読む)
自己診断機能付きロボット
【課題】低コストで自己診断を行うことができる自己診断機能付きロボットを提供することを目的とする。
【解決手段】自己診断機能付きロボットを、ロボット本体1と、ロボット本体に設けられる超音波距離センサ16,22と、ロボット本体1に設けられる右腕部4a、左腕部4bと、これら右腕部4a、左腕部4bの動作を制御する駆動制御部56と、超音波距離センサ16,22、右腕部4a、左腕部4b、及び駆動制御部56の診断を行う診断部73とを有する構成とする。診断部73を、駆動制御部56に、右腕部4a、左腕部4bを超音波距離センサ16,22の検出領域内と検出領域外との間で移動させる動作指令を送ったのちに、超音波距離センサ16,22の出力信号に変動が生じなかった場合に、故障が生じていると判定する構成とする。
(もっと読む)
カメラ及び標識を用いた移動ロボットの測位システム及び方法
【課題】室内空間においてn個の標識とカメラとを用いて、照明変化に拘わらず移動ロボットの自己位置及び方位情報を実時間で測定できるシステム及び方法を提供する。
【解決手段】カメラ及び人工標識を用いて移動ロボットの自己位置を測定する測位システムは無線機能を用いた非可視光線領域のLED点滅機能を有する人工標識、カメラ、天板に装着した標識を点滅させた後、フィルタを装着したカメラの映像により標識の位置及びIDを確認するモジュールと、映像の二つの標識を用いてロボットの位置及び方位を計算するモジュールと、標識を装着する天板の高さが異なる場合にロボットの位置を計算するモジュールと、作業空間に新たな標識を装着する場合に絶対座標上の標識の位置を計算するモジュールとを含む。二つの標識のみで位置を計算し、ロボットと標識との距離を必要としないため、標識の数の増加により新たな空間でもロボットの位置/方向を測定できる。
(もっと読む)
ネットワーク基盤知能型サービスロボットのビジョン処理装置及びその処理方法並びにこれを用いたシステム
本発明は、ネットワーク基盤の知能型サービスロボットシステムのビジョン処理装置とその処理方法並びにこれを用いたシステムに関する。ステレオカメラと低価の映像処理の専用チップ及びエンベディッドプロセッサーを用いて外部対象体らの三次元の距離情報を抽出/処理し、ネットワークを通じて連結されたロボットサーバに助けられず、障害物を回避しながら探していく対象物体まで移動することができるようにすることで、その他のセンサなしでステレオカメラの映像処理だけで知能型ロボットの移動と走行を行うことができ、また使用者が低コストで多様な機能のサービスの提供を受けるようにする。  (もっと読む)
(もっと読む)
脚車輪型移動ロボットとその階段歩行方法
【課題】 歩行中の足底のすべり、歩幅の誤差、階段そのものの幾何学的な誤差の影響を受けずに、一定の歩幅を維持して、多数の階段を安定に歩行することができる脚車輪型移動ロボットとその階段歩行方法を提供する。
【解決手段】 伸縮又は折曲げ可能な複数の支持脚14、16を立脚および遊脚として交互に振り出して歩行し、かつ支持脚の下端に設けられた足首・車輪駆動部18の車輪21で平坦地を走行する脚車輪型移動ロボット10の階段歩行方法。階段を上下する一歩毎又は数歩毎に、次の歩行に適した所定の位置まで、足首・車輪駆動部18で並進移動する補正期を有する。
(もっと読む)
自律制御型ロボットおよびその制御装置
【課題】緊急対応制御が可能な自律制御型ロボットを提供する。
【解決手段】自律制御型ロボットにおいて、自律制御系とは別の独立系統によって該ロボットの動作の安全性を監視して緊急対応制御ができるようにした。
(もっと読む)
自律移動装置
【課題】 特定の人のそばについて自律的に移動する自律移動装置において、その人の安全を確保することが可能な自律移動装置を提供する。
【解決手段】 自律移動装置1は、カメラ10および通信機12によって取得される情報から、主人およびその周囲環境を認識するとともに、認識された周囲環境に基づいて主人の危険度を判断する。そして、主人が危険であると判断された場合には、例えばスピーカ30から警告音を発したり、バックライト32を点灯させたり、または車輪36を駆動して自律移動装置1を移動させることによって主人の危険度を低減する。一方、主人の危険度が低いと判断された場合には、自律移動装置1は、主人に追従するように、または主人を誘導するように自律的に移動する。
(もっと読む)
画像マッピング及び視覚的アテンションのためのシステム及び方法
【課題】知能機械、特に適応自律ロボットの技術を提供する。
【解決手段】高密度感覚データを感覚自己中心球体(SES)にマップする。SES上に完全な視覚シーンを形成する画像内に関連の区域を見つけてランク付けする。画像データのアテンション処理は、個々のフルサイズ画像に対して行い、各アテンション位置を最も近いノードにマップし、各ノードで全てのアテンション位置を合計することによって最良に行われる。アテンション処理は、シーケンス内の各画像に対して繰返され、多くの情報が入手可能である。いくつかの隣接画像内で持続したアテンションポイントは、高い活性値を有することになり、1つの画像のみに見つかったアテンションポイントよりも顕著であると見なされる。従って、顕著であると見なされた位置が特徴である信頼性は、アテンション処理が上に配置された中心窩窓から復元された画像に対して1回のみ行われる代替処理方法によるものよりも高い。
(もっと読む)
ストーリー出力システム、ロボット装置およびストーリー出力方法
【課題】 ユーザが容易にストーリーのバリエーションを楽しめるようにする。
【解決手段】 ストーリー出力システム100は、空間中または2次元平面上に配置されるとともに、それぞれストーリーに登場し得る登場物に対応付けられた複数の物体の配置関係を取得する取得部106と、複数の物体の配置関係を、複数の物体にそれぞれ対応づけられた登場物同士の関係に反映させたストーリーを出力する出力処理部124とを含む。
(もっと読む)
飛翔ロボット操縦装置および飛翔ロボット操縦方法
【課題】本発明が解決しようとする課題は、人間が直接見て操縦することができない場所で用いる飛翔ロボットが周囲の物体に衝突したり、接触したりするのを防ぎ、操縦者が飛翔ロボットの向いている方向を確認しながら操縦できるようにすることである。
【解決手段】
物体近接検知センサおよび/または方位検出センサを飛翔ロボットに取り付け、該物体近接検知センサおよび/または方位検出センサの検出する情報を、該飛翔ロボットの周囲を観察するカメラの画像情報に加えて操縦者側に送り、モニタ画面内に表示する。
(もっと読む)
遠隔操作ロボットシステム
【課題】 複数ロボットを、少ないオペレータで、容易に、かつ安全確実に、遠隔操作可能としたロボットシステムを提供する。
【解決手段】 コマンド入力装置100から、共通のミッションを、複数のロボット200a,200bに送信し、他の複数のロボット200c〜200eへは、ロボット200bに設けたコマンド発生装置で中継し、転送する。これにより、コマンド入力装置100からオペレータ10のコマンドを、全てのロボットへ伝達し、共通のミッションを共同して達成させる。また、コマンドに、監視等のミッションに加え、ロボットの移動等の動作に関するコマンドを含めた場合には、移動しながら不審人物を探索するような場合に、前進させて前方を探索させるなどの命令を実行させることができる。
(もっと読む)
方向付け/位置決めシステム制御方法
【課題】高精度のシステム自動較正が可能な方向付けシステムを制御する方法の提供。
【解決手段】該方法はセンサ手段の入力空間におけるパターン位置を検出するためセンサ手段の行動前出力情報を評価するステップS1、センサ手段の入力空間における前記パターンの目標とされた行動後位置を決定するS2、センサ手段の入力空間座標における行動前位置と目標行動後位置との偏差を所定のマッピング機能を使用してアクチュエータ制御座標にマップすることによってアクチュエータ手段に関するコマンドを定義するS3、方向付け/位置決め行動を実行するため、定義されたコマンドに従ってアクチュエータ手段によってセンサ手段の方向付け/位置決めを行うS4、センサ手段の入力空間におけるパターンの実際の行動後位置を検出するステップS5、パターンの外部運動を検出するS6および前記S3において使用されたマッピング機能を適応するS7を含む。
(もっと読む)
移動ロボット
【課題】構造が簡単で低価格化でき、傾斜床でも姿勢維持が容易で長期間使用しても外面が汚れたり傷つくことがない家庭用途に最適な移動ロボットを提供する。
【解決手段】独立して回転駆動可能な3つの車輪ユニット4a,4b,4cを本体ユニット2からその外形を突出して搭載し、その車輪ユニットの回転軸3a,3b,3cを、その回転軸の被移動面8への投影線が互いに略等角度をなすように構成した。また、本体ユニット内に、出力装置15と、外部センサ14と、この外部センサ14の検出情報に対応して所定の処理を実行させるプログラムを格納したメモリ部13aと、この検出情報とこのプログラムとに基づき出力内容と車輪ユニットの回転駆動内容を決定し、出力装置と回転駆動装置10a,10b,10cとに実行を指示する制御部13とを搭載した。
(もっと読む)
移動体制御方法および移動体
【課題】 移動体が利用可能な移動動作が変化した場合でも、適切な移動動作を選択してパス上を移動できる移動体制御方法を提供する。
【解決手段】 パス決定部36が、CPU15が機能として利用可能な処理部35_1〜35_6等を特定し、その利用な処理部を基に、目標位置までの複数のパスを動的に特定する。そして、パス決定部36が、処理部35_1〜35_6を順次選択的に指示してロボット1に走行動作を行わせる。
(もっと読む)
81 - 100 / 132
[ Back to top ]