
Fターム[3C007KS20]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | マニピュレータの状態 (1,659) | 姿勢、角度、方向 (524)
Fターム[3C007KS20]の下位に属するFターム
関節角度 (352)
Fターム[3C007KS20]に分類される特許
1 - 20 / 172
脚式ロボット、その制御方法、及び制御プログラム
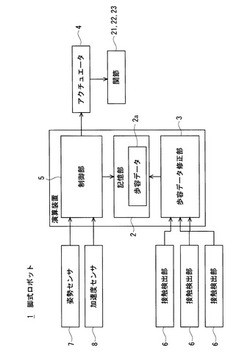
【課題】不整地路面に足部を確実に着地させること。
【解決手段】脚式ロボット1は、胴体10と、胴体10に連結された脚部20と、脚部20の下端に設けられた足部26と、歩容データ2aを記憶する記憶手段と、記憶手段に記憶された歩容データ2aに基づいて、脚部20の関節を駆動制御する制御手段と、足部26の足裏と路面との接触を検出する接触検出手段と、接触検出手段により検出された足部26の足裏と路面との接触位置を中心にして、足部26をロール軸及び/又はピッチ軸周りに回転させ、足部26の足裏の他の部分を路面に接地させるように歩容データ2aを修正する歩容データ修正手段と、を備える。
(もっと読む)
マスタ操作入力装置及びマスタスレーブマニピュレータ

【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
パワーアシスト装置
【課題】小型化および製造コストの低減が図られたパワーアシスト装置を提供する。
【解決手段】パワーアシスト装置10の制御部70は、クランプ部50による伝達部材40のクランプまたはアンクランプを切り替えることによって、ピストン25の移動を、搬送部材40を移動するためのアシスト力または搬送部材を制動するためのアシスト力に変換し、搬送経路Rに沿ってワークWを搬送させる搬送作業を円滑に行うことを可能にする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
干渉チェック方法及びロボット制御装置
【課題】ロボットアームと部品給材装置との干渉の有無を確実に発見する手段を提供する。
【解決手段】1方向に動作するロボットアーム100の移動方向と速さとを定めたベクトルデータであるロボットアーム並進速度データと、1方向に動作するワーク搬送装置の移動方向と速さとを定めるベクトルデータである部品給材装置200の並進速度データとから計算される相対速度データに基づく拡大処理から得られる拡大済み干渉ボリュームデータを生成する。拡大済み干渉ボリュームデータと、ロボットアーム100の形状データあるいは部品給材装置200の形状データとを、ロボットアームの位置姿勢データ及び部品給材装置200の位置姿勢データに従って、ロボットアーム100と部品給材装置が干渉の有無を確認する交差判定計算を行い、干渉の有無を判断する。
(もっと読む)
側面設置型力覚提示インターフェイス
【課題】
操作空間が広く、人間の指へそれぞれ3次元の力覚及び仮想物体の重量感を提示でき、さらに、圧迫感や装置の重量感を与えることがなく、安全で、小さな仮想物体を扱うことが可能な側面設置型力覚提示インターフェイスを提供する。
【解決手段】
力覚提示インターフェイスは操作者Hの手の指の運動に追従可能な複数の触覚指21〜25を有する触覚指ベース16と、触覚指ベースの空間運動を可能とするアーム機構110と、操作者Hの手の位置及び姿勢に連動させてアーム機構110を駆動制御するとともに、指の動きに連動させて触覚指を駆動制御するコントローラを有する。力覚提示インターフェイスは触覚指ベース16を操作者Hの手の甲側において甲から離間した状態で、触覚指に対して前記操作者の指に取付けするための指フォルダ26が設けられている。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
ロボット制御システム
【課題】スマートフォン等の携帯情報端末を利用して遠隔制御を行うロボットを制御するロボット制御システムを提供することを課題とする。
【解決手段】制御システム1は、ロボット2と、無線通信回線31と接続可能な携帯情報端末3と、ロボット2を制御する制御情報8を送出する遠隔制御端末7とを具備する。ロボット2は、携帯情報端末3を着脱自在に装着可能な頭部9及び胴体部10からなるロボット本体11と、ロボット本体11の下方に取設され、一対の走行車輪21a,21bを有する倒立二輪機構を採用した走行機構部5と、遠隔制御端末7から送出された制御情報8を携帯情報端末3を通じて受付け、ロボット2の動作制御及び走行制御を行うロボット制御部12とを具備して主に構成されている。
(もっと読む)
歩行支援装置
【課題】ユーザがイメージする歩行動作とうまく同期して脚装具を揺動することができる歩行支援装置を提供する。
【解決手段】歩行支援装置は、脚装具とアクチュエータとコントローラを備える。脚装具は、ユーザの大腿と下腿に夫々装着される大腿リンクと下腿リンクが回転ジョイントによって揺動可能に連結されている機構を有する。アクチュエータは、回転ジョイントの回転軸周りに下腿リンクを揺動させる。コントローラは、下腿リンクの揺動角が、遊脚膝角度の一歩分の経時的変化を記述した目標パターンに追従するようにアクチュエータを制御する。コントローラは、脚装具を装着した脚の足の腰位置に対する前後方向相対位置が、腰位置よりも第1距離閾値以上前方に移動した後に、腰位置よりも第2距離閾値以上後方に移動したことを条件として、前記目標パターンへの追従制御を開始する。
(もっと読む)
ロボットアームの制御方法及びプログラム
【課題】作業性の高いロボットアームの制御方法を提供する。
【解決手段】ロボットアームの制御方法は、外表部が柔軟部材600で覆われたロボットハンド(ハンド部120)を備えるロボットアームの制御方法であって、被挟持部材が置かれる載置面に柔軟部材600を押し付け、推定した柔軟部材600のつぶれ量を予め設定されたつぶれ量より大きくする工程と、ロボットハンドで被挟持部材を挟持する工程と、を備える。柔軟部材600を所定のつぶれ量で押し潰して被挟持部材を挟持するので、被挟持部材を確実に挟持でき、作業性を向上させることができる。
(もっと読む)
制御装置、産業用ロボット、座標系の再現方法、及びプログラム
【課題】座標系を設定した後にその座標系の設定に用いた基準位置データが消失した場合にも、容易にその座標系を再現することを可能にする。
【解決手段】制御装置10が、基準位置データを記憶するための基準値記憶部10aと、制御対象の所定の運動軸を所定の位置に変位させた状態で位置の検出を行うことにより位置データを取得しそれを保存する基準取得部(第1基準取得部12a、第2基準取得部13a)と、上記位置データと基準位置データとに基づいて座標系を設定する第1座標系設定部12と、基準位置データに対する位置データの相対データを取得しそれを保存する相対値取得部(第1座標系設定部12)と、基準位置データが消失したか否かを判断する判断部13cと、基準位置データが消失したと判断された場合に、上記検出により位置データを取得し、その位置データと上記相対データとに基づいて、座標系を再現する第2座標系設定部13と、を備える。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれの低減に寄与しない床反力成分が発生するのを極力防止するように床反力を操作する。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、存在許容領域を逸脱する場合に、実ロボット外力操作量が“0”であると仮定した場合の全床反力中心点の目標位置(目標ZMP)と制限前補償ZMPとを結ぶ線分と、存在許容領域の境界線との交点が、全床反力中心点(制限後補償ZMP)となるように、実際の床反力の目標を決定する。
(もっと読む)
視覚センサのマウント装置と方法
【課題】視覚センサの正確な位置と姿勢が不明である場合、或いはその位置又は姿勢が変化している場合でも、視覚センサをロボットのハンドに正確にマウントすることができる視覚センサのマウント装置と方法を提供する。
【解決手段】ロボット座標系ΣRにおいてハンド11を3次元移動可能なロボット2と、視覚センサ座標系ΣSにおいてハンドの位置と姿勢を非接触で検出可能な視覚センサ14とを備える。ロボット座標系において視覚センサ14の検出範囲内にハンド11を移動して(S1)、視覚センサ14により視覚センサ座標系におけるハンド11の位置と姿勢を非接触で検出し(S2)、この検出結果からハンド11と視覚センサ14の相対位置関係を算出し(S3)、測定した相対位置関係からロボット座標系ΣRにおける視覚センサ14の位置と姿勢を算出し(S4)、ロボット座標系においてハンド11を移動してハンドに視覚センサ14をマウントする(S5)。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれを低減するように実際の該ロボットに作用させる床反力を操作することが過剰に制限されるのを防止し、該床反力の操作によって該姿勢のずれを低減することの効果を高める。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、ロボット1の複数の脚体2が着床状態となる期間内において方形状と異なる形状の領域に設定した存在許容領域を逸脱する場合に、全床反力中心点が存在許容領域のうちの制限前補償ZMPに最も近い位置(制限後補償ZMP)になるように、実際の床反力の目標を決定する。
(もっと読む)
マニピュレータ及びマニピュレータの制御方法
【課題】本発明は、小型な駆動部を有するマニピュレータを、または複数の構造物が存在する狭隘部へマニピュレータを挿入にできるマニピュレータの制御方法を提供することである。
【解決手段】本発明は、上記目的を達成するために、少なくとも一つの駆動部と、前記駆動部に接続する少なくとも一つのリンクとを備えるマニピュレータの前記駆動部の姿勢角を検出し、前記姿勢角から前記マニピュレータの手先の位置および姿勢を算出するマニピュレータまたはマニピュレータの制御方法において、前記姿勢角の検出は前記リンクの駆動軸またはその延長線が前記姿勢検出器の検出軸とが一致するように設けられた前記姿勢検出器によって行なうことを第1の特徴とする。
(もっと読む)
把持ロボットおよび把持方法
【課題】少ない計算コストで、確実かつ完全に、対象物を把持する技術を提供する。
【解決手段】把持ロボットは、アーム部と前記アーム部に設けられた1対のハンド部と前記1対のハンド部のそれぞれに設けられた指部とを有し、台上の対象物を把持する把持部と、前記把持部に設けられ、前記対象物を撮像するカメラ部と、前記把持部および前記カメラ部を制御する制御部とを備え、前記制御部は、前記カメラ部によって撮像された撮像画像内における重力方向を特定し、前記撮像画像内における重力方向に基づいて前記撮像画像内において前記対象物と前記台との境界部を検出し、前記境界部の位置に基づいて前記台と前記対象物との間に前記1対のハンド部のそれぞれの指部を挿入するように前記把持部を制御する。
(もっと読む)
ロボット、位置推定方法及びプログラム
【課題】ロボット、位置推定方法及びプログラムにおいて、比較的簡単、且つ、正確に観測対象であるユーザの位置を推定することを目的とする。
【解決手段】少なくとも1軸を中心に回転可能なカメラの撮像画像から観測対象と推定される観測対象らしき画像の観測値を画像生成部により計算し、観測対象の位置の過去の推定結果と現在の前記カメラの姿勢に基づいて観測対象らしき画像の予測値を画像予測部により計算し、画像比較部により前記観測値と前記予測値を比較して前記観測値と前記予測値の一致度を尤度として計算し、前記尤度に基づいて前記観測対象の位置を位置推定部により推定するように構成する。
(もっと読む)
2足移動ロボットの制御装置及び歩容生成装置
【課題】2足移動ロボットに片脚ホッピング動作を行なわせるときに、離床・着床動作を行なう脚体の基端部の関節に大きなモーメントが作用するのを防止する。
【解決手段】片脚ホッピング動作を2足移動ロボット1に行わせるとき、離床・着床動作を行なう脚体2(支持脚側脚体2)の離床後の着床状態において、支持脚側脚体2の基端部よりも、支持脚側脚体2と異なる脚体2(遊脚側脚体2)の基端部の方が相対的に高い位置に存在するように、ロボット1の目標運動(上体24の目標姿勢)を生成する。
(もっと読む)
ロボット自己位置同定システム
【構成】ロボット自己位置同定システム100は、ネットワーク400を介して接続される追跡サーバ10およびロボット18を含む。追跡サーバ10は空間内の実体(E)を追跡し、ロボット18は状態データを出力する。追跡サーバ10は状態データおよび実体(E)の位置データをバッファに記憶する。また、追跡サーバ10はバッファに記憶された複数の位置データおよび複数の状態データに基づいて、ロボット18と実体(E)とを関連付ける。さらに、追跡サーバ10は、ロボット18に関連付けられた実体(E)を利用して、補正データをロボット18に送信する。そして、ロボット18は、追跡サーバ10が送信した補正データに基づいて自身の位置および角度を補正する。
【効果】ロボット18と追跡サーバ10で追跡される実体(E)とを関連付けることができるため、容易にロボット18を自己位置同定することができる。
(もっと読む)
ロボットの遠隔操作システム
【課題】連続的に作業指示を行うことができるロボットの遠隔操作システムを提供する。
【解決手段】本発明のロボットの遠隔操作システム1(1000)は、第1の撮像手段110(410)と、作業指示手段120(420)と、ロボット200と、を備える。作業指示手段は、第1の撮像手段の位置情報、作業対象物が含まれるように撮像された画像情報、作業対象物に対して実行させる作業指示情報をロボットに送信する。ロボットは、作業指示手段から受信した第1の撮像手段の位置情報に基づいて移動し、周辺情報取得手段250、260でロボットの周辺の情報を取得し、取得した周辺情報と作業指示手段から受信した画像情報との照合結果から作業対象物の位置情報を取得し、取得した位置情報に基づいて作業対象物に近づき、作業指示手段から受信した作業指示情報に基づく作業を作業対象物に対して実行する。
(もっと読む)
1 - 20 / 172
[ Back to top ]