
Fターム[3C007KS33]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 力 (648)
Fターム[3C007KS33]の下位に属するFターム
Fターム[3C007KS33]に分類される特許
1 - 20 / 377
ロボット制御装置、ロボット制御方法、およびプログラム
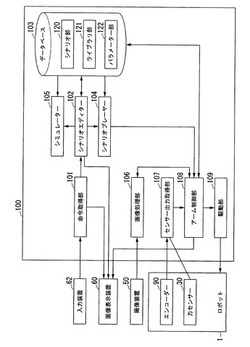
【課題】曖昧な命令をロボットに入力しても、ロボットに動作を行わせることができず汎用性のあるロボット制御装置、ロボット制御方法、およびプログラムを提供すること。
【解決手段】シナリオとサブシナリオとが対応付けられて登録されているデータベース103と、入力装置62から入力された命令を取得する命令取得部101と、命令取得部が取得した命令に対応するサブシナリオをデータベースから読み出して、サブシナリオに基づいてロボット1を制御する制御コマンドを生成する制御コマンド生成部104とを備え、制御コマンド生成部は、命令取得部が取得した命令を実行するのに必要な要素に未取得の要素がある場合、ロボットに未取得の要素を取得させる命令を抽出してロボットに送信し、ロボットが取得した要素をサブシナリオに組み込んでロボットを制御する制御コマンドを生成する。
(もっと読む)
ロボットハンド及びロボット装置

【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラム
【課題】汎用性の高いねじ締めを行えるロボット、ロボット制御装置、ロボット制御方法、ロボット制御プログラムを提供する。
【解決手段】ドライバービット51の先端の係合部52が磁化されているドライバー50を把持するアーム部20と、アーム部20を制御する制御部100とを備え、制御部100は、ドライバー50の係合部52を磁力により係合可能な頭部を有するねじ211の頭部頂面の溝に押しつけた状態で、ドライバー50の係合部52にねじ211の頭部頂面の溝が嵌合した状態で磁力により生じる吸着力よりも小さく、ドライバーの係合部52にねじ211の頭部頂面の溝が当接した状態で磁力により生じる吸着力よりも大きい慣性力がねじ211に作用する第1の所定の加速度で、ねじ211が吸着されたドライバー50を移動させる。
(もっと読む)
力センサの出力に基づいてロボットのダイレクトティーチをおこなうロボット教示装置
【課題】スイッチなどを用いることなしに、操作感を簡易に変更する。
【解決手段】ロボット教示装置(10)は、少なくとも1軸方向の力と、該1軸に直交、かつ、互いに直交する2軸方向の夫々の軸回りのモーメントを検出する力検出部3と、ロボット1を移動させるときに基準とする移動基準座標系を設定する移動基準座標系設定部21と、ロボットを移動基準座標系の原点回りに回転移動させるか、前記移動基準座標系を基準にして並進移動させるかのいずれかの移動方法を設定する移動方法設定部22と、1軸方向の力と、2軸方向の夫々の軸回りのモーメントと、所定の作用基準点の位置とに基づいて、作用基準点における仮想力を算出する仮想力算出部23と、移動基準座標系と移動方法と仮想力とに基づいて、ロボットに対する力制御作用力を算出する力制御作用力算出部24と、力制御作用力に基づいて力制御をおこなう力制御部25とを含む。
(もっと読む)
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム
【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
パワーアシスト装置
【課題】小型化および製造コストの低減が図られたパワーアシスト装置を提供する。
【解決手段】パワーアシスト装置10の制御部70は、クランプ部50による伝達部材40のクランプまたはアンクランプを切り替えることによって、ピストン25の移動を、搬送部材40を移動するためのアシスト力または搬送部材を制動するためのアシスト力に変換し、搬送経路Rに沿ってワークWを搬送させる搬送作業を円滑に行うことを可能にする。
(もっと読む)
ロボットハンド
【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
ロボット
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボット100は、アーム103L,103Rと、アーム103L,103Rに設けられ、アーム103L,103Rを駆動させるアクチュエータAc2〜Ac8と、アーム103L,103Rの内最も基端側に位置するアクチュエータAc2,Ac9の基部に設けられたセンサ固定治具121と、センサ固定治具121に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122とを有する。
(もっと読む)
ロボットシステム及びロボットの異常検出方法
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、ロボットコントローラ150とを備えており、ロボット100は、アーム103L,103Rに設けられたセンサ122を有し、ロボットコントローラ150は、アーム103L,103Rが異常のない状態で所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記録する規範データ記録部163と、稼働時においてアーム103L,103Rが所定の動作を行う間のセンサ122の出力値Vの時間履歴を出力データとして記録する出力データ記録部167と、規範データ記録部163に記録された規範データと出力データ記録部167に記録された出力データとを比較することにより、アーム103L,103Rの異常の有無を判定する比較判定部164とを有する。
(もっと読む)
ロボットシステム及びロボットの状態判定方法
【課題】ロボットの機能性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122と、センサ122の出力値Vに基づいて、ロボット100が常態であるか非常態であるかを判定する判定部164を備えたロボットコントローラ150とを有している。ロボットコントローラ150は、アーム103L,103Rが常態時に所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記憶する規範データ記録部163を有し、判定部164は、稼働時において、アーム103L,103Rが所定の動作を行う際のセンサ122の出力値Vの出力データと、規範データ記録部163に記録された規範データとを比較することにより、ロボット100が常態であるか非常態であるかを判定する。
(もっと読む)
力制御装置
【課題】力覚センサの低コスト化を実現しながら、ロボットの先端部に作用する外力を高精度に算出すること。
【解決手段】モータにより駆動されるロボット3と、前記ロボット3の先端部が指令位置に追従するように前記モータを駆動する電流指令を生成するロボット制御手段2と、前記ロボット3の先端部の6個の動作方向のうち、x軸方向、y軸方向、z軸方向の3個の動作方向の夫々にかかる外力を検出する力覚センサ31と、前記力覚センサ31の検出値、前記モータの位置、および前記電流指令に基づいて、前記ロボットの先端部のn個の動作方向のうちの少なくとも前記力覚センサ31が外力を非検出とする3つの軸の回転方向の外力算出に必要となる摩擦係数を夫々同定し、当該同定した摩擦係数に基づいて当該3つの軸の回転方向にかかるモーメントの推定値を算出する力推定オブザーバ4と、を備える。
(もっと読む)
3軸力センサを用いて力制御をおこなうロボットの制御装置
【課題】3軸力センサによっては検出できない力およびモーメントを推定する。
【解決手段】ツール(4)およびワーク(W)の一方に対して他方をロボット(1)の手先部によって相対的に移動させ、ツールとワークとの間に作用する力を制御するロボット制御装置(11)は、1軸方向の力と、該1軸に直交で且つ互いに直交する2軸方向の軸回りのモーメントとを検出する力検出部(3)と、ツール(4)とワーク(W)との間に作用する力を推定するための力推定用点を設定する力推定用点設定部(12)と、力検出部により検出した1軸方向の力および2軸方向の軸回りのモーメントと、力推定用点設定部により設定された力推定用点の位置とに基づいて、前記2軸方向の力またはさらに前記1軸回りのモーメントととを推定する力推定部(13)と、を備える。
(もっと読む)
外力判定用パラメータ決定装置及びプログラム、並びに移動体装置
【課題】ロボットに与えられている外力判定を高精度に行うための閾値を決定する。
【解決手段】近似部142が、ロボットに対して人的操作による外力及び積載による外力をそれぞれ与えたときにロボットに加わる垂直抗力を所定のサンプリング周期(Δt)で取得し、各サンプリング間隔における垂直抗力の変動量を指数関数で近似する。また、取得部144が、f0の値を変更しつつ、各外力における垂直抗力の変動量がf0を超える確率GL、GHをそれぞれ求め、それらの確率の差分を取得する。そして、パラメータ導出部146が、取得部が取得した確率の差分に基づいて選択されるf0の値を、外力の判定に用いるパラメータ(閾値fc)とする。
(もっと読む)
側面設置型力覚提示インターフェイス
【課題】
操作空間が広く、人間の指へそれぞれ3次元の力覚及び仮想物体の重量感を提示でき、さらに、圧迫感や装置の重量感を与えることがなく、安全で、小さな仮想物体を扱うことが可能な側面設置型力覚提示インターフェイスを提供する。
【解決手段】
力覚提示インターフェイスは操作者Hの手の指の運動に追従可能な複数の触覚指21〜25を有する触覚指ベース16と、触覚指ベースの空間運動を可能とするアーム機構110と、操作者Hの手の位置及び姿勢に連動させてアーム機構110を駆動制御するとともに、指の動きに連動させて触覚指を駆動制御するコントローラを有する。力覚提示インターフェイスは触覚指ベース16を操作者Hの手の甲側において甲から離間した状態で、触覚指に対して前記操作者の指に取付けするための指フォルダ26が設けられている。
(もっと読む)
組立ロボットとその制御方法
【課題】単一のワークを複数の動作で対象物に組み付ける際に、各動作における条件の変化を考慮して、各動作においてその成功又は失敗を逐次判定することができる組立ロボットとその制御方法を提供する。
【解決手段】単一のワーク1を複数の動作で対象物2に組み付ける組立ロボット10であって、外力を計測する力センサ14を有しワークを把持するロボットハンド12と、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアーム16と、各動作におけるワークの動作条件を記憶しロボットアームを制御するロボット制御装置20とを備える。ロボット制御装置20により、各動作において、ワーク1の位置と計測された外力を動作条件と照合し、各動作の成功又は失敗を判断する。
(もっと読む)
加工ロボット及びその重力補償方法
【課題】重力補償の精度を高め、かつ、計測動作時において工具とワークとの衝突を避け、さらに、計測時間を短縮することを可能とした加工ロボット及びその重力補償方法を提供する。
【解決手段】外力を計測する力センサ15を備えた工具12を用い、加工中に工具12に作用する加工反力を計測しながらワーク1を加工する加工ロボット10の重力補償方法であって、加工軌道をCAMによって生成し、ワーク1の加工前に、加工軌道と干渉しない範囲で準備した計測軌道において、工具12を加工時の姿勢で動作させ、その際の力センサ15の計測値をオフセット値として記憶し、ワーク加工時に、加工軌道上の同一の姿勢におけるオフセット値を、加工中の力センサ15の計測値から差し引いて、加工反力を算出し、加工反力を用いて、工具12の押付力を制御しながらワーク1に倣って加工する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
組立ロボットとその制御方法
【課題】画像センサを用いずに、ワークと中間部材の嵌合状態を判断することができる組立ロボットとその制御方法を提供する。
【解決手段】外力を計測する力センサを有しワークを把持するロボットハンドと(S1)、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアームと、ロボットアームを制御しワークに嵌合された中間部材を対象物に嵌合させる組立作業を実行するロボット制御装置とを備える(S2)。ロボット制御装置により、組立作業中のワークの位置と計測された外力から組立作業の成功又は失敗を判断し(S3)、組立作業が失敗であるときに、ワークを組立作業前の位置へ戻し(S4)、次いで、中間部材が嵌合不能な固定部材5に対して固定部材を仮想的に対象物とみなして組立作業を再実行し(S5)、再実行中のワークの位置と計測された外力からワークと中間部材の嵌合状態を判断する(S6)。
(もっと読む)
ロボットの校正装置および校正方法
【課題】ロボットの位置決め精度と同等の精度で作業対象とロボットとの校正を実行することができるとともに、校正作業を効率化させることができるロボットの校正装置および校正方法を得る。
【解決手段】ロボットと作業対象20との校正を実行するロボットの校正装置であって、ロボットハンド15と作業対象20との接触を判定する力覚センサ14と、ロボットハンド15と作業対象20との接触時におけるロボットの位置姿勢を取得する位置取得部と、位置取得部で取得された複数のロボットの位置姿勢に基づいて、作業対象20の姿勢をロボット座標系で算出する姿勢算出部と、姿勢算出部で算出された作業対象20の姿勢にロボットを移動させる駆動部と、駆動部により移動された複数のロボットの位置姿勢に基づいて、作業対象20の位置を算出する位置算出部とを備える。
(もっと読む)
剛性を有する複数の弾性ワイヤーを用いたパラレルメカニズム
【課題】従来のパラレルメカニズム等の多自由度機構は、一般的に構造が複雑で、柔軟性も低い。
【解決手段】本発明のパラレルメカニズムは、剛性を有する複数の弾性ワイヤーを合理的に用いて構成することにより、従来のパラレルメカニズムでは不可能であった柔軟な動きを行えるようにした多自由度機構を提供するものであり、即ち、剛性を有し、円形断面で単線の弾性ワイヤー1の複数本が、被駆動側部材2と駆動側部材3の各支点位置において同一配置となるように接続されており、また被駆動側部材と駆動側部材間には弾性ワイヤーを、横断面方向から見た配置を維持しつつ、軸方向に移動及び軸方向の回りに回転可能に支持する中間支持部材4が設けられているパラレルメカニズムである。
(もっと読む)
1 - 20 / 377
[ Back to top ]