
Fターム[3C007KS34]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 力 (648) | 押付け力、反力 (204)
Fターム[3C007KS34]に分類される特許
1 - 20 / 204
加工ロボットの軌道追従装置と方法
【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
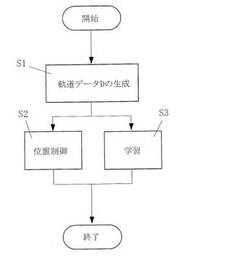
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
加工ロボットの軌道追従装置と方法

【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの追従遅れなしに、高精度の加工をすることができる加工ロボットの軌道追従装置と方法を提供する。
【解決手段】(A)ワークのCADモデルから軌道データを生成して記憶装置に記憶し、(B)加工前に、軌道データに沿って、加工速度より低速の倣い速度で、ワークを加工することなくワークを倣い、その動作位置から軌道データを修正して目標軌道を設定し、(C)次いで、目標軌道に基づき、ワークと接触させることなく加工速度で加工工具を位置制御して、軌道データを再修正する学習を繰返して加工に使用する目標軌道データとして記憶し、(D)加工時に、学習後の軌道データに基づき、加工速度で加工工具を位置制御してワークを加工する。
(もっと読む)
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされている。
(もっと読む)
把持装置
【課題】被把持物と接触する接触部を交換する必要が生じたとき、圧力センサ全体を交換することなく、その接触部のみ交換できるようにする。
【解決手段】把持装置は、両側に電極22a,22bが設けられた圧電素子21を電極22a,22bに接続された1対のフレキシブル基板23a,23bで挟み込んで形成された圧電振動型圧力センサ20を、ワークを把持する把持部6の指先部6a及び中節部6bに圧電素子21と1対のフレキシブル基板23a,23bを把持部6の把持力方向に配置して備え、さらに、把持部6に着脱可能に設けられた耐油性、耐薬性の弾性を有するゴム製の保護層24を備えている。被覆部材の劣化、傷、摩耗、ヘタリが生じても、圧電振動型圧力センサ全体を交換する必要がなく、保護層24のみを交換できる。
(もっと読む)
探索装置、自動組付け装置、探索方法、およびプログラム
【課題】部品のワークへの組付け位置を精度よく探索できる探索装置を提供する。
【解決手段】ワークは、バカ穴とバカ穴の底面に形成されたネジ穴とを有する。探索装置は、ネジと底面とを接触させた状態で、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを移動させる。探索装置は、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを各々移動させたときに反力が閾値Th1以上となる位置Pα,Pβ,Pγ,Pδを特定する。探索装置は、位置Pαと位置Pβとの間の距離が閾値Th2未満の場合には、位置Pαと位置Pβとの中間位置を起点としたv軸方向への移動と、位置Pγおよび位置Pδの特定とを実行する。探索装置は、位置Pγと位置Pδとの間の距離が閾値Th2未満の場合には、位置Pγと位置Pδとの中間位置をネジの組付け位置と判断する。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
作業の良否判定システム及び良否判定方法
【課題】ロボット1等の機械装置においてワークの保持部近傍の大型化やケーブル数の増加を抑制するとともに、センサ等の故障を防止する。
【解決手段】ロボット1等の機械装置におけるワークの保持部(例えばチャック8)と、その支持部(例えば手首部6)との間に可動部(例えばコンプライアンス装置7)を設け、作業に伴う保持部及び支持部の位置の変化からその良否を判定する。例えば、可動部の保持部側及び支持部側の部材に夫々マーカーMを設けて、カメラ11により撮影した画像中のマーカー位置を画像処理により検出し、保持部及び支持部の間隔の変化から作業の良否を判定する。
(もっと読む)
粗倣い制御を行うロボットの制御装置
【課題】形状が未知の部分や障害物等がワークに存在する場合でも、ロボット、作業ツール及びワークに対して過大な負荷をかけることなく、なるべくワークの形状に沿った迅速な倣い制御を可能とするロボット制御装置の提供。
【解決手段】ロボット制御装置14は、ツールとワークとの間に作用する力を検出する力検出手段16と、ロボット12の動作切り替えの判定及びパラメータ調整を行う動作切り替え判定・動作パラメータ調整部34と、動作切り替え判定・動作パラメータ調整部34による動作指令に基づいて、ロボット12に送る指令を演算する指令演算部36とを有する。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム
【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法、及び基板位置補正方法
【課題】基板の位置ずれを検出することが可能な基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法を提供する。また、基板位置補正方法を提供する。
【解決手段】基板搬送用ロボットシステム10は、基板Wの下面に接触する接触部PBL、PFL、PBR、PFR及び接触部PBL、PFL、PBR、PFRに接触した基板Wの重心位置を検出するための複数のセンサSBL、SFL、SBR、SFRが設けられた基板搬送用ハンド60を有する基板搬送用ロボット20と、1)基板搬送用ハンド60上の基準となる位置にて基板Wが支持された際の各センサSBL、SFL、SBR、SFRの検出値である基準値と現在の各センサSBL、SFL、SBR、SFRの検出値との差分をそれぞれ演算する差分演算部70及び2)各差分に基づいて基板Wの位置ずれ方向を判断する第1の判断部72を有する第1の制御装置30とを備える。
(もっと読む)
人の動作における意図推定装置
【課題】人の動作において、表面筋電位等の生体信号に頼らずにそれが意図したものであるか否かを識別する。
【解決手段】人の動作している位置、および角度の計測方法を用いて動作情報を取得し(S700)人の動作を人が実現可能な範囲に制限し(S701)、その動作中における人の関節角度と動作している部位の先端位置の位置情報を抽出し(S702〜S703)多変量解析手法を用い(S704〜S709)、さらに人の動作が意図するものであるか否かを識別する閾値を用いて、人の動作がその人が意図するものであるか否かを識別する(S710)ことで、表面筋電位等の生体信号に頼らずに、動作が意図したものであるか否かを識別することを可能にした。
(もっと読む)
脚式ロボット
【課題】手部の指部の把持面が4足歩行時に損傷するのを回避し、4足歩行時に圧覚センサを用いた制御によってロボット本体の姿勢の安定性の向上を図る。
【解決手段】4つの肢部をもつ脚式ロボットの上肢部に設けられた手部209,212を用いて、ナックル歩行により安定な4足歩行を行う。右手部209には、2本の指部101a,102aの指背面125a,126aに接地検出用の手部圧覚センサ107a,112aが設けられている。また、左手部212には、2本の指部101b,102bの指背面125b,126bに接地検出用の手部圧覚センサ107b,112bが設けられている。これら手部圧覚センサ107a,112a,107b,112bを用いてナックル歩行時の姿勢が制御される。
(もっと読む)
ロボットハンドの制御装置、制御方法、及び制御用プログラム
【課題】ロボットハンドの指先における物体の接触を確実に検出すると共に物体の物性を推定し、当該物性に適合した危険回避制御を実現する。
【解決手段】第1指関節に対するトルク指令によるトルク値から第1指リンクの重量及び慣性力に抗するためのトルク値を減算した第1指関節接触トルクと、第2指関節に対するトルク指令によるトルク値から第2指関節より先端側の部分の重量及び慣性力に抗するためのトルク値を減算した第2指関節接触トルクとに基づいて、前記第1指リンクの指先と物体との接触を検出する。指先が物体に接触していると判定された場合には、物体のヤング率を推定し、指先が物体と接触する際の制御剛性が物体の剛性を超えないように第1及び第2指関節に対するゲインを調整する。
(もっと読む)
ロボットアームの制御方法及びプログラム
【課題】作業性の高いロボットアームの制御方法を提供する。
【解決手段】ロボットアームの制御方法は、外表部が柔軟部材600で覆われたロボットハンド(ハンド部120)を備えるロボットアームの制御方法であって、被挟持部材が置かれる載置面に柔軟部材600を押し付け、推定した柔軟部材600のつぶれ量を予め設定されたつぶれ量より大きくする工程と、ロボットハンドで被挟持部材を挟持する工程と、を備える。柔軟部材600を所定のつぶれ量で押し潰して被挟持部材を挟持するので、被挟持部材を確実に挟持でき、作業性を向上させることができる。
(もっと読む)
マニピュレータ制御装置
【課題】物体表面に対してマニピュレータを適切に作用させる。
【解決手段】直線を含む曲線を有する物体表面上の複数点の位置測定を行う測定手段と、上記物体表面に物理的作用を施すマニピュレータと、上記測定手段による測定データを基に上記マニピュレータを制御する制御手段とからなる。物体表面上の任意の位置測定点の近傍の複数の位置測定点を用いて円弧近似を行う演算部を備え、該演算部は上記円弧近似を行う位置測定点の組合せを前記円弧近似の相関係数が最も高い組合せとして選択し、上記制御手段は演算部で演算された円弧近似によって得られる校正曲線を基にマニピュレータを制御する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれを低減するように実際の該ロボットに作用させる床反力を操作することが過剰に制限されるのを防止し、該床反力の操作によって該姿勢のずれを低減することの効果を高める。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、ロボット1の複数の脚体2が着床状態となる期間内において方形状と異なる形状の領域に設定した存在許容領域を逸脱する場合に、全床反力中心点が存在許容領域のうちの制限前補償ZMPに最も近い位置(制限後補償ZMP)になるように、実際の床反力の目標を決定する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれの低減に寄与しない床反力成分が発生するのを極力防止するように床反力を操作する。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、存在許容領域を逸脱する場合に、実ロボット外力操作量が“0”であると仮定した場合の全床反力中心点の目標位置(目標ZMP)と制限前補償ZMPとを結ぶ線分と、存在許容領域の境界線との交点が、全床反力中心点(制限後補償ZMP)となるように、実際の床反力の目標を決定する。
(もっと読む)
ロボット装置およびロボット装置による把持方法
【課題】対象物の位置情報に誤差が含まれる場合にも、確実に対象物を把持することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられ、力制御を行うための力センサ21a、22aおよび23aを有する多指ハンド部20と、視覚センサ30による検出により、把持対象物110の少なくとも位置情報を取得する画像処理部43と、画像処理部43により取得した把持対象物110の少なくとも位置情報に基づいてロボットアーム10を移動させて把持対象物110に多指ハンド部20を近づけていき、多指ハンド部20の力センサ21a、22aおよび23aの出力に基づいて把持対象物110に対する実際の接触位置を検出し、検出した接触位置の情報に基づいて把持対象物110の位置情報を修正する制御装置40とを備える。
(もっと読む)
ロボット装置
【課題】把持対象物の把持状態を維持することが可能な把持形態を選択することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられた多指ハンド部20と、視覚センサ30による検出により、把持対象物110の位置情報および形状情報を取得する画像処理部43と、把持対象物110の位置情報および形状情報に基づいて多指ハンド部20による把持形態の候補を複数抽出するとともに、抽出された複数の把持形態の候補についての多指ハンド部20の関節トルクに基づいて、抽出された複数の把持形態の候補の中から1つの把持形態を選択する制御装置40とを備える。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの運動中に、複数の必要条件を満足させることが可能となる各脚体の先端部の運動軌道を効率よく決定しつつ、前記複数の必要条件を満足させる目標歩容を生成する。
【解決手段】脚式移動ロボット1の脚体2のうちの遊脚の先端部(足平22)の目標着地位置の第1着地許容領域と第2着地許容領域とを決定し、これらの着地許容領域が重なり合う領域に目標着地位置を決定し、ロボットの目標歩容を生成する。第1着地許容領域は、幾何学的脚体運動必要条件を満足するように決定される。第2着地許容領域は、床反力の構成要素である所定の床反力要素に係わる運動系属性必要条件と床反力要素許容範囲条件とを満足させ得るように決定される。
(もっと読む)
1 - 20 / 204
[ Back to top ]