
Fターム[3C007KT11]の内容
マニピュレータ、ロボット (46,145) | 視覚装置、画像化装置 (2,194) | 画像認識方法、画像認識手段 (258)
Fターム[3C007KT11]の下位に属するFターム
光切断法 (44)
Fターム[3C007KT11]に分類される特許
1 - 20 / 214
立体視ロボットピッキング装置
【課題】カメラとワークの間隔が長くなるのを抑制し、ステレオ方式でワークの3次元位置を算出しロボットの吸引部の配置位置を決める立体視ロボットピッキング装置を提供する。
【解決手段】コンテナ11内のワーク12を順次ロボット13によって別位置に移動する立体視ロボットピッキング装置10において、ワーク取出し位置18までコンテナ11を送る移動手段14と、ワーク取出し位置18にあるコンテナ11全体を撮像するカメラ15と、ワーク取出し位置18にあるコンテナ11を部分的に撮像するカメラ16と、カメラ15、16が撮像した各画像中のワーク12をパターンマッチングによって検出して、各画像中でのワーク12の2次元位置を算出する画像処理手段23とを有し、カメラ15、16は、コンテナ11の移動方向に沿って配置され、画像処理手段23は、カメラ15、16の各画像中のワーク12の2次元位置からワーク12の3次元位置を算出する。
(もっと読む)
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法

【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
カメラシステムおよびその制御方法
【課題】高操作性を確保しつつ、ミスコミュニケーションの発生を軽減することができないという問題を解決することが可能なカメラシステムを提供する。
【解決手段】画像処理部16は、カメラ11で撮像された撮像画像に対して、その撮像画像内の所定領域を加工する画像処理を行って、加工画像を生成する。表示部は、加工画像を表示する。操作部は、カメラの向きを示す操作コマンドを受け付ける。モータ制御部18は、操作コマンドに応じてカメラ11の向きを調整する。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】ターゲットのサブピクセルレベルでの位置検出を高精度に行う。
【解決手段】ロボット装置1は、ターゲットを搬送可能に保持する多関節ロボット10と、ゴール位置とターゲットとを撮像する撮像装置20と、画像上のゴール位置にピクセルレベルで位置合わせされたターゲットをサブピクセルレベルの変位量で変位させたときの画素値の変化量により表される感度に応じて、ターゲットが配置された状態のゴール画像データを記憶するゴール画像記憶部と、撮像装置20から得られるターゲットを含む画像データとゴール画像記憶部に記憶されたゴール画像データとの比較に基づいてターゲットの一致度評価値を計算し、この一致度評価値に基づいてゴール位置に対するターゲットの位置ずれを検出するターゲット検出部と、この位置ずれをなくす方向にターゲットを搬送するよう多関節ロボット10を制御するロボット制御装置50とを備えた。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
動作プログラムの自動生成プログラムおよび装置
【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
マニプレータ装置およびマニプレータ付き作業装置
【課題】
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
ロボット制御装置
【課題】ロボットのハードウェア制限条件を考慮しながら、安定したビジュアルフィードバック制御を提供する。
【解決手段】カメラで撮影された画像から対象物の特徴を表す画像特徴量を算出する画像特徴量算出部105と、画像特徴量の変化と前記関節角の変化の割合である画像ヤコビアンを算出する画像ヤコビアン算出部107と、設定された目標値と前記画像特徴量とを用いて、ロボットの制御周期毎の画像上の目標軌道を生成する目標軌道生成部108とを備える。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】物体の状態の推定処理を高速化させる。
【解決手段】ワーク状態推定部110は、カメラ103により複数の物体が撮像された画像データに基づいて、複数の物体の状態を推定する。取り出しワーク選定部110は、推定された複数の物体の状態を示す第1の状態情報に基づいて、複数の物体から取り出される物体を選定する。制限範囲設定部112は、複数の物体のうちの物体以外の他の物体の状態を示す第2の状態情報に基づいて、他の物体の状態の推定処理を制限する範囲を示す制限範囲情報を生成する。ワーク状態推定部110は、制限範囲情報に従って、他の物体の状態を推定する。
(もっと読む)
ワークの特定部位認識方法及びその装置
【課題】 ワークの特定部位の位置を速やかに認識することができるワークの特定部位認識装置を提供する。
【解決手段】 ワーク1の特定部位であるボルト孔7,8を認識するワークの特定部位認識装置であって、ワーク1を撮像するカメラ2と、このカメラ2が撮像するワーク1を把持する関節型ロボット3と、この関節型ロボット3によるワーク把持位置を関節型ロボット3の座標系に基づいて算出し、ワーク把持位置と特定部位であるボルト孔7,8との相対的位置関係に基づいてカメラ2の認識領域を、特定部位であるボルト孔7,8を含む周辺領域に限定する認識領域限定手段9を備える。
(もっと読む)
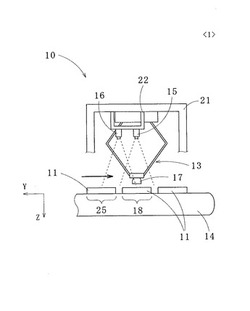
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
溶接状況監視方法及び溶接状況監視装置
【課題】撮像手段の設置位置が不明な状況下でも、溶接状況を監視できるようにする。
【解決手段】本発明では、少なくとも撮像手段16の設置位置が不明な状況下で溶接ロボット1の先端部12aを撮像し、当該先端部12aが写り込んだ画像を取得する。画像上における先端部12aの位置である撮像先端部位置fPと、溶接ロボット1の先端部12aの位置である実先端部位置rPとを取得する。撮像先端部位置fPと実先端部位置rPとの関係を示す変換パラメータ(xc,yc,zc,αc,βc,γc)を求める。求めた変換パラメータ(xc,yc,zc,αc,βc,γc)を用いて、実先端部位置rPとカメラ座標で表現されたロボット先端部位置cPとを関係づける変換マトリックスcrTを求め、この変換マトリックスcrTを用いて、光軸がロボット先端を向くように撮像手段16を動かして溶接状況を監視する。
(もっと読む)
画像生成装置、画像生成方法、およびプログラム
【課題】把持機構等の不要部分のない対象物のみの姿勢別画像を簡便な画像処理で得る。
【解決手段】対象物の画像を生成する画像生成装置であって、対象物を把持する把持部と、対象物と把持部との少なくとも1つの画像を撮像する撮像部と、把持部により把持された対象物が、撮像部に対して複数の所定姿勢のうちの1つの所定姿勢となるように把持部を制御する制御部と、撮像部により撮像された1つの所定姿勢にある対象物および対象物が1つの所定姿勢となるように制御された把持部の画像と、1つの所定姿勢とを関連付けて、把持状態画像として取得する第1の画像取得部と、対象物を把持しておらず且つ対象物が1つの所定姿勢となるように制御された姿勢と一致する所定姿勢である把持部の画像を非把持状態画像として取得する第2の画像取得部と、把持状態画像と、非把持状態画像との差分に基づいて、1つの所定姿勢について対象物のみの対象物画像を生成する画像生成部と、を備える。
(もっと読む)
追跡ロボット装置、追跡ロボット制御方法、追跡ロボット制御プログラム、ホモグラフィー行列取得装置、ホモグラフィー行列取得方法、およびホモグラフィー行列取得プログラム
【課題】リアルタイム性を確保し且つ安定性の高いトラッキングを行う。
【解決手段】ホモグラフィー行列取得装置30は、撮像装置11が出力する画像データを取り込む。ホモグラフィー行列取得装置30は、画像データごとに局所的ホモグラフィー行列を計算し、また、その計算レートよりも低いレートで、大域的ホモグラフィー行列を計算する。ホモグラフィー行列取得装置30は、画像データごとに、局所的ホモグラフィー行列を用いて画像データを変換し、参照画像との相関を求める。相関が高い場合は、当該画像データに対応して計算した局所的ホモグラフィー行列が読み出されるように制御する一方、相関が低い場合は、最新の大域的ホモグラフィー行列が読み出されるように制御する。ロボット制御装置45は、ホモグラフィー行列取得装置30からホモグラフィー行列データを読み込んでロボット本体12の姿勢を計算し動作を制御する。
(もっと読む)
シミュレーションシステムおよびそのためのシミュレーションプログラム
【課題】本発明は、作業ロボットが行う作業に求められる作業精度を満たす精度で、取得した画像データから作業対象物の3次元位置・姿勢認識を行い、作業ロボットが当該作業を適切に行うようシミュレーションすることが可能なシミュレーションシステムおよびそのためのシミュレーションプログラムの提供を目的とする。
【解決手段】本発明にかかるシミュレーションシステムは、撮像部20、特に第2撮像部22の倍率設定、フォーカス設定等の撮像パラメータを制御し、作業に要求される作業精度を満たす解像度で画像データを取得することにより、作業対象物10自体の大きさや、作業対象物10と撮像部20との距離に影響されて解像度が低下することを防ぎ、作業対象物10に対する必要な3次元位置・姿勢認識精度を維持することができるので、シミュレーションおよび現実の作業において作業効率の低下や、作業の失敗確率の増大を招くことを抑制できる。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
ロボット及びその制御方法
【課題】対象物を認識しながらアーム等を対象物まで近づけることができる新規なロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、頭部11、ロボット本体12、アーム13、カメラ14、物体認識部15、認識空間算出部16、軌道算出部17、可動制御部18を備える。カメラ14は、ロボット本体12の周囲の物体の環境情報を取得する。物体認識部15は、カメラ14が取得した環境情報に基づいて、ロボット本体12の周囲に存在する把持対象物90を認識する。認識空間算出部16は、物体認識部15により把持対象物90を認識するために必要とする空間としての認識空間20を算出する。軌道算出部17は、アーム13が、認識空間20への侵入を回避しつつ、把持対象物90に向かう軌道を算出する。可動制御部18は、アーム13の認識空間20への侵入を回避するように、アーム13の動きを制御する。
(もっと読む)
バラ積みピッキング装置および方法
【課題】メッシュボックス等の容器にバラ積みされた複数のワークから、人による重量物のハンドリング作業なしにワークを1つずつピッキングすることができ、かつ容器内のワーク全体を高い位置精度で計測することができ、距離センサと容器及びワークとの干渉を無くすことができ、これによりピッキング時間を短縮し、ピッキングの成功率と装置の稼働率を高めることができるバラ積みピッキング装置および方法を提供する。
【解決手段】ハンド14によりハンドに距離センサ16を取り付け(S1)、ハンドを移動して、距離センサ16によりバラ積みされたワーク全体の3次元形状データをハンド14で計測し(S2)、かつ計測した3次元形状データからハンド14で把持可能なワーク1の位置と姿勢を認識し(S4)、ハンド14によりハンドから距離センサ16を取り外し、ハンド14により把持可能なワーク1を順に把持して搬送先に搬送する(S6)。
(もっと読む)
ワーク取出し装置およびワーク取出し方法
【課題】ばら積みされたワークの取出し作業を効率的に行う。
【解決手段】ばら積みされた複数のワーク5を含むワーク積載領域のカメラ画像に基づいてワーク5を検出するワーク検出部8aと、ワーク検出部8aによる検出結果に基づいて、ロボット2により取り出されるワーク5を選定するワーク選定部8bと、ロボット2の動作によってワーク5の積載状態が変化したか否かを判定する積載状態判定部8cと、ワーク検出部8aによりワーク5を検出する際のワーク検出領域を設定する領域設定部8eとを備える。領域設定部8eは、積載状態判定部8cによりワーク5の積載状態が変化したと判定されると、その積載状態の変化位置の周辺領域であり、ワーク積載領域の一部にワーク検出領域を設定する。
(もっと読む)
1 - 20 / 214
[ Back to top ]