
Fターム[3C007KT12]の内容
マニピュレータ、ロボット (46,145) | 視覚装置、画像化装置 (2,194) | 画像認識方法、画像認識手段 (258) | 光切断法 (44)
Fターム[3C007KT12]に分類される特許
1 - 20 / 44
ピッキング用部品供給装置、および部品ピッキング装置
【課題】
部品供給装置に多数の部品を山積み状態でストックしても、容易かつ確実に部品の山積み状態を変えることが可能な山積み部品供給装置を提供する。
【解決手段】
前記収容容器の底面を構成する容器底部と、収容容器の壁面を形成する円筒形状であって、当該円筒形状の軸を回転軸として前記容器底部に対して相対回転可能な収容容器本体と、前記前記収容容器本体に所定の回転動作をさせる容器本体駆動部と、を備えた。
(もっと読む)
ワーク取り出し方法

【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
形状計測装置、ロボットシステムおよび形状計測方法
【課題】計測対象物の走査に要する合計の時間を短くすることが可能な形状計測装置を提供する。
【解決手段】このセンサユニット(形状計測装置)4は、レーザ光を照射するレーザ発生器15と、レーザ発生器15から照射されたレーザスリット光をワーク200の載置されている領域に走査するミラー部16と、ミラー部16から照射され、計測対象物により反射されたレーザ光の反射光を検出することにより、ワーク200の載置されている領域を検出するとともに、ワーク200の3次元計測を行う高速カメラ11と、高速カメラ11によって検出されたワーク200の載置されている領域に応じてミラー部16による走査範囲を変更するように制御するセンサコントローラ13とを備える。
(もっと読む)
溶接用ロボット
【課題】溶接用ロボットの姿勢を変更しても画像センサが邪魔にならないようにする。
【解決手段】溶接用ロボット1において、アーム部15の先端に手首部16を介して溶接ツール17を取り付ける。手首部16に移動手段26を取り付けると共に移動手段26を介して画像センサ25を取り付け、この移動手段26を、画像センサ25を溶接ツール17に対して移動させる構造とする。また、移動手段26を、画像センサ25を手首部16の軸芯に沿って移動させる構造とする。或いは、移動手段26を、画像センサ25を手首部16の軸芯回りに移動させる構造とする。移動手段26を、画像センサ25を手首部16の軸芯に対して垂直方向に移動させる構造とする。
(もっと読む)
溶接マニピュレータ教示装置
【課題】レーザ光が照射された溶接ワークの撮像画像に基づく仮想ワイヤ距離Lを表示することで、溶接ワイヤの曲げ修正の手間をなくし、教示作業の精度向上、容易化を図る。
【解決手段】本発明に係る溶接マニピュレータ教示装置1は、溶接マニピュレータ2の溶接ノズル3に備えられる溶接ワイヤ4を溶接ワークWの溶接線Sに沿わす溶接動作を、溶接マニピュレータ2に教示する。溶接マニピュレータ2に、溶接ワイヤ4のワイヤ軸WJ方向又はこのワイヤ軸WJを横切る方向に沿ってレーザ光Kを溶接ワークWへ照射する投光器5と、投光器5のレーザ光軸LJを横切る方向からレーザ光Kが照射された溶接ワークWを撮像するカメラ6とを配備した光学機構7が設けられ、カメラ6の撮像画像Gと、撮像画像Gに基づいて計算された溶接ノズル3から溶接ワークWまでの仮想ワイヤ距離Lとを表示する表示手段8を有する構成となっている。
(もっと読む)
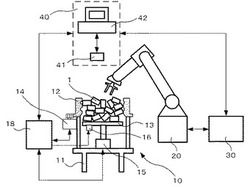
移載装置
【課題】ワークの移載時間を短縮することが可能な移載装置を提供する。
【解決手段】移載対象となるワーク20を収容する容器11と、予め決められた検出領域に存在するワーク20の位置及び姿勢を検出するセンサ12と、センサ12の検出結果に基づいてワーク20を取り出し、移載先に移載するロボット13とを備え、センサ12は、複数の検出領域を記憶する領域記憶部25と、複数の検出領域をそれぞれ切り替えるための切り替え条件を記憶する条件記憶部26と、切り替え条件を満たした場合に複数の検出領域を予め決められた順番に切り替える制御部27とを有する。
(もっと読む)
ワークの把持方法
【課題】バラ積み状態のワークを多フィンガのハンドで把持する場合に他のワークが対象ワークの上に重なっている状態であっても、ワークの把持を可能にし、ワークの把持成功率を向上させるワークの把持方法を提供する。
【解決手段】2つの把持装置(第1乃至第4フィンガF1乃至F4)を用いてワーク(リンフォースメントW)を把持するとき、把持しようとする把持対象ワーク(把持対象リンフォースメントT)に対して把持装置を挿入する一方の把持装置挿入箇所(領域A)に他のワークとの干渉がない状態で、一方の把持装置挿入箇所に第1の把持装置(第1フィンガF1及び第2フィンガF2)を挿入して把持対象ワークを把持して持ち上げる片持ち把持工程と、第1の把持装置によって持ち上げられた把持対象ワークのまわり(領域D)に第2の把持装置(第3フィンガF3及び第4フィンガF4)を挿入して把持する両持ち把持工程と、を含むワークの把持方法。
(もっと読む)
ロボット装置、ロボット装置の遠隔制御方法及びプログラム
【課題】遠隔操作が必要な自律ロボット装置に対して、ユーザーが容易に遠隔操作することが可能なロボット装置、ロボット装置の遠隔制御方法及びプログラムを提供する。
【解決手段】自装置又は外部環境の現在状況を把握し、現在状況に基づいて将来の行動計画を複数の行動計画候補のうちから一つの行動計画に決定する行動計画部と、決定された行動計画に基づいて、自装置を遠隔制御する遠隔制御装置に表示する表示内容を、予め用意しておいた複数の表示パターン候補のうち一つの表示パターンに決定し、決定された表示パターンを遠隔制御装置に表示させる表示制御部とを備える。
(もっと読む)
視覚センサを備えたロボットシステム
【課題】一時停止せずに、ワークを撮像した瞬間の正確なロボット位置を取得する。
【解決手段】ロボットシステム(10)は、視覚センサ(13)に対するワークの位置情報を算出する処理部(32)と、ロボット制御部(31)および処理部が現在時刻を参照する時計(35)と、所定周期の第一の時刻と、第一の時刻におけるアーム先端部の位置情報とを組にして順次記憶する第一記憶部(33)と、視覚センサがワークを計測する第二の時刻を記憶する第二記憶部(34)と、第一の時刻のうち、第二の時刻よりも前および後の少なくとも二つの第一の時刻と、該第一の時刻のそれぞれに対応するアーム先端部の位置情報とに基づいて、視覚センサがワークを計測したときのアーム先端部の位置情報を算出するアーム先端部位置算出部(41)と、アーム先端部およびワークの位置情報とに基づいて、アーム先端部に対する把持されたワークの位置情報を算出するワーク位置算出部(42)とを含む。
(もっと読む)
形状測定装置
【課題】測定者の操作に応じて関節部の回転動作を補助するように構成された形状測定装置を提供する。
【解決手段】形状測定装置100は、光学式センサ40により被測定物体51を非接触で走査して当該被測定物体51の形状の測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bの各々に設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bに設けられ、当該関節部11bにより接続された一方のアーム部11a若しくはプローブ12を他方のアーム部11aに対して回転駆動させる駆動部15と、角度情報からプローブ12の移動を検出して駆動部15を作動させる制御部20と、を有する。
(もっと読む)
対象物把持領域抽出装置および対象物把持領域抽出装置を用いたロボットシステム
【課題】
位置姿勢が未知な対象物が置かれた供給部の三次元情報から、ロボットの把持機構で把持可能な対象物を含む把持領域を抽出する。
【解決手段】
ロボットで把持する対象物の供給部の三次元計測データから供給部の三次元情報を生成し、予め記憶された把持機構領域と把持部分領域とからなる把持領域を用い、把持部分領域の全体に物体が存在し、把持機構領域に物体が存在していない領域を、三次元情報から把持可能領域として抽出する。
(もっと読む)
レーザセンサ制御装置及びレーザセンサ制御方法
【課題】レーザセンサのレーザ光が直接人の眼に入る危険性がなく、レーザ光の反射を検知できなくなっても測定を続行することができるレーザセンサ制御装置を提供する。
【解決手段】ロボット10と、ロボット10のアーム先端部に設けられ、レーザ光を照射することでロボット10の作業対象についての情報を取得するレーザセンサ20と、ロボット10の動作を制御し、ロボット10の動作に伴ってレーザ光が予め定められた設定区域に対して照射されるか否かを判断するロボット制御装置30と、ロボット制御装置30で判断した結果を基に、レーザ光が設定区域に対して照射されると判断された場合にはレーザ光の出射を許可し、レーザ光が設定区域に対して照射されないと判断された場合にはレーザ光の出射を不許可とするレーザセンサコントローラ40とを備える。
(もっと読む)
対象物の3次元位置・姿勢認識装置及びその方法
【課題】基準面上に置かれた同一形状の複数の対象物の3次元位置・姿勢を正確かつ容易に認識する。
【解決手段】3次元形状取得部26により得られた対象物20の集合21の3次元位置・姿勢データと、対象物20の3次元モデルであって位置と姿勢を変化させた当該3次元モデルの位置・姿勢データとを比較し、対象物20の集合21中、前記3次元モデルの位置・姿勢に一致度の高い対象物20を決定する。
(もっと読む)
対象物の把持システム及び同システムにおける干渉検出方法
【課題】マニプレータが対象物を把持する前に、当該マニプレータと把持対象物以外の物体(他の対象物を含む)との干渉の有無を検出する。
【解決手段】3次元形状取得部26により取得した対象物20の3次元位置・姿勢データと対象物20の3次元モデルとの比較結果に基づき対象物20の3次元位置・姿勢を認識し、認識した対象物20に対しz方向からマニプレータ14を降下させ、該マニプレータ14により対象物20を把持しようとする際、マニプレータ14のz方向の位置が最も低くなる計算位置にマニプレータ14の平面視の大きさを考慮した干渉判定用仮想平板を設け、当該干渉判定用仮想平板のz方向上方の空間内に前記3次元位置・姿勢データが存在している場合には干渉有りと判定する。
(もっと読む)
計測システム
【課題】1台の計測装置で複数の計測対象を計測可能とし、かつ、計測対象の絶対位置を精度良く計測することを可能とする。
【解決手段】 この計測システムは、計測対象38までの距離と方向を計測する計測装置34と、計測装置が取付けられているロボット装置(20,32)と、計測対象の近傍に設置されている絶対位置が既知の参照計測対象36と、計測装置34とロボット装置(20,32)を制御すると共に、計測結果から計測対象38の絶対位置を演算する制御装置12を備えている。制御装置12は、参照計測対象36までの距離と方向を計測するキャリブレーション工程と、計測対象38までの距離と方向を計測する計測工程と、を実施する。
(もっと読む)
ワーク搬送装置およびこれを使用したワーク搬送方法
【課題】荷崩れして絡み合った状態のクランクシャフト等のワークを作業者の手を借りることなく自動で取り出し搬送できる。
【解決手段】ロボットアームの先端部11に搬送治具2が設けられ、搬送治具2は中央がアーム先端部11に支持され、その一端に三次元位置認識用のカメラ42を、他端には搬送されるクランクシャフトWのシャフト部W1に嵌装される筒状の保持具3を備えている。カメラ42の画像からシャフト部W1の姿勢と位置を特定し、保持具3内にシャフト部W1を相対的にを進入させた後、保持具3を開口が上方に位置するような姿勢にしてクランクシャフトW1を持ち上げて搬送する。
(もっと読む)
部品キットを用いた生産システム
【課題】生産に必要な部品を集めた部品キットの形成の信頼性を向上させる。
【解決手段】複数の部品が収納された部品収納部と、製品を生産するために必要な複数の部品を部品収納部より取り出し集めて部品キットを形成するロボットとが配置された生産システムは、予め撮像された各種類の部品の像である部品基準画像51、および、各製品のための部品キットに含まれるべき部品の情報である部品キット構成部品情報52を記憶する記憶手段と、ロボットにより実際に形成された部品キットを撮像する撮像手段6と、それにより撮像された部品キットの画像と部品基準画像51とを比較し、部品キットに実際に含まれている部品の種類と数を特定する部品特定手段42aと、それによって特定された部品の種類および数と部品キット構成部品情報52とを比較し、必要な部品が部品キットに過不足なく含まれていることを確認する確認手段43とを備える。
(もっと読む)
ロボットシステムおよびロボットの制御方法
【課題】 センサ座標系を気にせず、ワーク寸法の入力も必要とせずに、計測を含む把持動作の教示、再生をできるようにする。
【解決手段】 ロボット制御装置102において、手動操作でグリッパ107を把持位置へ移動して教示位置として記録し、前記教示位置を中心としてあらかじめ決められた広さを計測範囲として決定し、前記計測範囲をワークの形状計測手段により計測したワーク形状をマスタデータとして前記教示位置と関連づけて記録する。前記マスタデータと計測データを比較する。マスタデータに対する計測データの3次元の位置姿勢を計算して修正量とする。前記修正量にしたがって把持位置を修正し、グリッパ107を把持位置へ移動する指令を生成する。
(もっと読む)
作業装置
【課題】移動機構部の先端に着脱可能なヘッド部を、空間内の目標位置に高精度に位置決めすることができる作業装置を提供する。
【解決手段】形状測定装置(作業装置)100は、形状センサ部17が内蔵されたプローブ(ヘッド部)12と、所定の空間内でプローブ12を移動させるアーム部(移動機構部)11に、このプローブ12を取り付け可能な取付部16と、空間内における所定の目標位置にプローブ12を位置決めする空間位置決定部30と、を有する。
(もっと読む)
ロボットシステム、ロボットシステムの制御装置および制御方法
【課題】教示作業を精度よく且つ効率よく行うことができるロボットシステム、ロボットシステムの制御装置および制御方法を提供する。
【解決手段】ロボットシステムにおいて、視覚センサは、ロボットの制御点と共に移動し、ロボットの作業対象であるワークの画像情報を取得する。記憶部は、ロボットの制御点と視覚センサの視野内の特定位置との位置関係を示す位置関係データRを格納する。制御部は、ロボットの制御点の現在位置Pを検出する。制御部は、検出された制御点の現在位置Pをワークの特徴点の位置とみなして上記の位置関係データRに基づいて、特徴点が視覚センサの視野内の特定位置に位置するようなロボットの制御点の目標位置PPを演算する。そして、制御部は、ロボットの制御点が目標位置PPに移動するようにロボットを制御する。
(もっと読む)
1 - 20 / 44
[ Back to top ]