
Fターム[3C007KV04]の内容
マニピュレータ、ロボット (46,145) | センサの方式 (946) | 電気式(例;静電容量) (195)
Fターム[3C007KV04]の下位に属するFターム
スイッチ(例;リミットスイッチ) (34)
歪ゲージ、感圧抵抗体 (93)
Fターム[3C007KV04]に分類される特許
41 - 60 / 68
チャック装置

【課題】検出部を設けることによる大型化を抑制しつつ、簡素な構成で把持部の開閉量を高精度に検出する。
【解決手段】チャックボディ12に供給される圧力流体によってピストン14を変位させることにより、把持部22を構成する一組の第1及び第2フィンガ20a、20bをベース体36に沿って開閉動作させると共に、前記第1及び第2フィンガ20a、20bの内部に軸状のボビン78を挿通させ、該ボビン78の小径部90にコイル86を巻回している。そして、第1及び第2フィンガ20a、20bの開閉動作に伴うコイル86のインピーダンス変化から開閉量を検出している。
(もっと読む)
音源方向推定装置、音源方向推定方法、及びロボット装置

【課題】本発明の目的は、対雑音耐力向上のため、音響効果のみで音源方向の特定をせず、音声とセンサが収集した情報とを用いて簡易的に且つ総合的に音源の同定を行うことであり、また、音源が存在する方向の推定において、より小規模な構成で且つコストも削減できる音源方向の推定を実現することである。
【解決手段】本発明のシステムは、音源の方向を推定するにあたって、音源からの音情報を収集するマイクだけで行うのではなく、赤外線センサや超音波センサやスイッチ等によって音源の方向を特定するための情報を収集して、音源方向の同定精度を向上させることを特徴とする。
(もっと読む)
ロボット装置及びそのセンサ計測情報転送システム
【課題】ロボット装置におけるセンサ計測情報転送システムにおいて、センサの出力信号をA/D変換するためのA/D変換部の配置自由度を向上させるとともに、ロボット制御部がセンサの計測情報を収集するための通信処理に要する処理負荷を軽減する。
【解決手段】A/D変換部12a〜cは、センサ10a〜cより送信されるアナログ信号をデジタルデータに変換し、変換後のデジタルデータを送信する。インタフェース変換部14は、A/D変換部12a〜cから送信されるデジタルデータを受信し、A/D変換部12a〜cから受信されたデジタルデータを集約した集約データを送信する。ロボット制御部16は、インタフェース変換部14から送信される集約データを受信し、集約データに基づいてロボット装置に対する制御を実行する。さらに、インタフェース変換部14は、A/D変換部12a〜cと独立した別個の基板17dに形成される。
(もっと読む)
基板取り扱いロボットの改善した校正方法
加工システムにおけるロボットを校正する方法(500)が提供される。方法は、距離センサ(214)をロボットのエンドエフェクタ(102)に脱着自在に結合すること(502)、及び距離センサをしてセンサ(214)から基板支持体(108)までの距離を計測させること(506)を含む。そして、その距離が選択されたしきい値を満たす又はその範囲内であるかどうかを判定する。距離が選択されたしきい値を満たす又はその範囲内であるときのロボットジョイント位置を記録する。 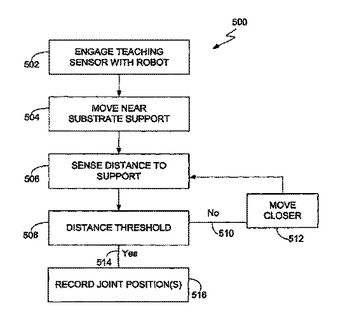 (もっと読む)
(もっと読む)
滑り検出装置、滑り検出方法および滑り検出プログラム
【課題】簡易な構成で、把持部における滑りを高精度に検出すること。
【解決手段】対象物体と対象物体を把持する把持部との接触面の滑りを検出する滑り検出装置1は、接触面における圧力を検出する圧力検出手段3と、圧力検出手段3により検出された接触面の圧力に基づいて、接触面の圧力の中心位置Ocを算出する中心位置算出手段5aと、中心位置算出手段5aにより算出された圧力の中心位置Ocの変化量を算出する変化量算出手段5bと、把持部の把持力を算出する把持力算出手段5cと、変化量算出手段5bにより算出された圧力の中心位置Ocの変化量と、把持力算出手段5cにより算出された把持部の把持力と、に基づいて、接触面に滑りが発生しているか否かを判定する滑り判定手段5dと、を備えている。
(もっと読む)
デバイス搬送高さ基準位置設定方法及びハンドラ装置
【課題】 吸着ノズルの先端部がデバイスに接触したことを電気的に検出させるようにしたハンドラ装置を提供する。
【解決手段】ハンドラ装置であって、吸着ノズルを導電性材料で形成して、一定の第1の電位を印加させると共に第1の電位を出力信号として出力する第1の電位検出手段と、ポケットに載置するデバイスを導電性材料からなるダミーデバイスで形成し、ダミーデバイスに一定の第2の電位を印加させる第2の電位印加手段と、吸着ノズルがダミーデバイス方向に下降して吸着ノズルのノズル先端面がダミーデバイスの上面に接触することで得られる短絡した状態を、第1の電位検出手段が電気的に検出して第2の電位を出力信号として出力し、そのときの吸着ノズルの高さ位置を、吸着ノズルがデバイスを吸着する高さ基準位置と設定する基準位置設定手段と、を備えたことである。
(もっと読む)
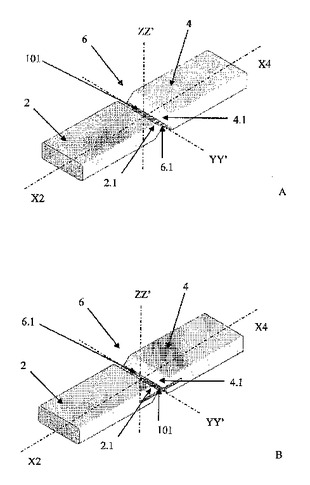
ロボット用の或いは触覚インターフェース用の継手付き肢部並びにそのような継手付き肢部を含むロボット及び触覚インターフェース
本発明の主要目的は、少なくとも第一(2)及び第二(4)の剛性セグメントと、継手(6)とを含む、ロボット又は触覚インターフェースのための継手付き及び器具付きリブであり、前記継手(6)は、繊維と、少なくとも1つの測定素子(101,102)とを含み、剛性セグメント(2,4)のそれぞれの内に固定される。本発明は、目的のために、少なくとも1つのそのような継手付き肢部を含むロボット又は感触インターフェースも有する。
 (もっと読む)
(もっと読む)
脚式ロボット
【課題】脚式ロボットにおいて、足部と路面との距離を安定して測定することができる技術を提供する。
【解決手段】脚式ロボットは、体幹と、体幹に対して揺動可能に接続されている複数の脚リンクと、各脚リンクの先端に設けられている足部と、少なくとも一つの足部と路面との距離を測定する路面センサを備えている。そして、路面センサは、少なくとも一つの足部に配置されているコイルと、コイルのインダクタンスを測定する測定器とを備える。
(もっと読む)
ナノピンセット、把持力検出方法およびナノピンセットの駆動装置
【課題】微小な把持力を検出することができるナノピンセット
【解決手段】ナノピンセットに設けられたグリッパ部Gには一対のアーム1,2が設けられており、アーム1を駆動機構3による駆動することにより、アーム1,2間に試料を把持することができる。アーム2側には駆動機構4が設けられており、櫛歯状凹凸部40,41間に働く静電力によりアーム2が振動駆動される。試料を把持する際にはアーム2が振動駆動され、把持時における振動振幅の変化をアドミッタンス変化として検出することにより、把持力を算出する。
(もっと読む)
ロボット用触覚センサ装置
【課題】弱く接触しても検知することができるとともに、センサをロボットのカバーに取り付けることができることを可能にする。
【解決手段】ロボット40の本体の周囲を覆うカバー50を振動させるアクチュエータ4と、カバーに取り付けられカバーの振動を検出するセンサ5と、アクチュエータを一定の条件で振動をするよう制御する振動制御部3と、アクチュエータにより与えた振動とセンサにより検出された振動とを比較しカバーへの接触の有無を検出する接触検出部2と、を備えている。
(もっと読む)
チャック装置
【課題】被挟持物を安定して挟持できるチャック装置を提供する。
【解決手段】ロボットハンドに取り付けられるチャック装置は、金属で形成される金属フィンガー41aと樹脂で形成される樹脂フィンガー41bとを有するフィンガー部40を備えている。よって、フィンガー部40でワーク91を挟持する場合、金属フィンガー41aは変形しないのに対して、樹脂フィンガー41bは挟持力によって弾性的に曲がる部分BNが生じる。このように樹脂フィンガー41bが弾性変形することによりワーク91をソフトに挟持できるため、金属同士のフィンガーでワークを挟持する場合のようにフィンガーとワークとが点接触とならず、ワーク(被挟持物)を安定して挟持できる。
(もっと読む)
皮膚センサを有する電子機器
【解決手段】皮膚センサを有するコミュニケーションロボットは、皮膚センサからの信号をAD変換した源信号を受けるSH2マイコンを含み、本マイコンは、その源信号を、ハイパスフィルタにてハイパス信号を検出し、またバンドパスフィルタにてバンドパス信号を検出する。源信号のレベルが所定値より大きいかどうかを判定し(S1)、大きい場合はハイパス信号のレベルが所定値より大きいかどうかを判定する(S2)。このとき、ハイパス信号のレベルが大きい場合、コミュニケーションロボットは叩かれていると判定し(S3)、小さい場合、撫でられていると判定する(S4)。一方(S1)で小さいと判定された場合は、バンドパス信号のレベルが所定値よりも大きいかどうかを判定する(S5)。バンドパス信号のレベルが大きい場合、手を添えられていると判定し(S6)、小さい場合、接触なしと判定する(S7)。
【効果】簡単な信号処理をするだけで接触状態の識別が可能となる。
(もっと読む)
接触点検出装置およびこれを用いたロボット
【課題】 高速で接触検出が可能であり、配線や処理回路を単純化させた構成の接触検出装置とこれを用いたロボットを提供する。
【解決手段】 多数の開口(孔)121を有する絶縁スペーサ12を介して、導電シート11、13の導電面を向かい合わせに配置している。接触力が作用すると、これらの導電面が接触し、短絡することで、接触を検知することができる。この接触センサ1は、複数の接触センサ1を直列ないし並列に接続することが可能であり、その場合は検出回路には2本の導線のみで接続が可能である。
(もっと読む)
物品把持装置、物品の把持不良の検出方法、及び、把持部材
【課題】ワークが斜めの状態で把持される等の把持不良を検出するための新規な技術を提案する。
【解決手段】物品(ワーク10)を規定の支点2a〜2dで把持するための複数の把持部材(フィンガー2A・2B)を具備し、前記各フィンガー2A・2Bには、前記各支点2a〜2dの温度を検知するためのセンサ3a〜3dが設けられる構成とする。また、前記各センサ3a〜3dにて前記各支点2a〜2dの温度を検知するとともに、図示せぬ制御装置によって、前記各支点2a〜2dにおける温度と規定の閾値とを比較し、前記温度が前記閾値を超えたときに、把持不良を検出するものとする。
(もっと読む)
滑り検出装置
【課題】 把持部における滑りを精度良く検出すること。
【解決手段】 物体を把持する把持部と物体との接触面の圧力に基づいて、接触面の滑りを検出する滑り検出装置1は、接触面の圧力分布を算出する圧力分布算出手段5aと、圧力分布算出手段5aにより算出された圧力分布に基づいて、圧力分布の中心Ocを算出する圧力中心算出手段5bと、圧力中心算出手段5bにより算出された圧力分布の中心Ocにおける振動パワーを含む滑り判定関数に基づいて、接触面における滑りが発生したか否かを判定する滑り判定手段5cと、を備えている。
(もっと読む)
触覚センサ
【課題】高精度な感触センシング能力を発揮する触覚センサを提供する。
【解決手段】対象物と接触することによって曲面に生じる歪み分布、もしくは応力分布を検出する少なくとも2個の検出素子を有することを特徴とする触覚センサ、対象物と接触することによって球面あるいは非球面もしくは非平面からなる曲面に生じる歪み分布、もしくは応力分布を異なる2点の歪みあるいは応力値から検出する検出素子を有する上記の触覚センサ。
【効果】人の触覚を代替し、触覚情報を定量的に計測できる触覚センサを提供することが出来る
(もっと読む)
複数の関節要素からなるロボットアームおよびアーム形状を特定するための手段
ロボットアームは、先端追従運動でアームが蛇様の形状を取れるように、複数の関節要素(12)と、さまざまな要素(12a、12b、12c)の位置を制御するための制御手段(6)からなる。要素の少なくともいくつかの相対位置を直接測定するための手段(2)は、理論上の形状からの逸脱を計算し、アーム制御手段に補正値を与えるために設けられている。  (もっと読む)
(もっと読む)
接触センサシステム
【課題】 接触センサを効率よく機能させ、物体との接触を短時間に精度良く検出できる接触センサシステムを提供する。
【解決手段】 可動型ロボットの動作に伴って物体Wと接触する可能性がある接触部位に設置され、物体Wとの接触を検出する接触センサ2と、物体Wの情報を入手する物体情報取得手段3と、可動型ロボットの動作を計画する動作計画手段4と、物体Wに関する情報と前記動作計画とに基づいて、前記接触部位の内で前記物体と接触する可能性が高い実接触部位を予測する実接触部位予測手段5と、前記実接触部位における前記接触センサの検出精度を、他の部位と比べて高くする感度調整手段6とを備える接触センサシステム1である。可動型ロボットの動作に伴って物体Wと接触する可能性が高い実接触部位の検出精度を他の部位と比べて高くするので、短時間で精度良く物体Wとの接触を検出できる。
(もっと読む)
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】フィンガー部101の先端が閉じた状態(a)において、回転部材230を一方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423によって、フィンガー部101の屈曲部335が内側に向かって押される。圧縮ばね501の付勢力に逆らって、回転部材230をそのまま回転をさせていくと、フィンガー部101の後端は閉じていき、フィンガー部101の先端は開いていく。一方、フィンガー部101の先端が開いている状態(b)において、回転部材230を他方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423に追従して、フィンガー部101の屈曲部335が外側に向かって移動する。回転部材230をそのまま回転させていくと、フィンガー部101の後端は開いていき、フィンガー部101の先端は閉じていく。
(もっと読む)
ロボットハンドの指表面の滑り検知装置
【課題】 把持面に柔軟構造を採用したロボットハンドにおいて指表面における把持物体の滑りを判定することを可能とした滑り検知装置を提供する。
【解決手段】 柔軟構造10sを有する指表面に複数のセンサ(例えば、圧力センサ)からなる触覚センサ18を配置し、把持対象物200の把持開始時の指先に働く法線接触力Fnと、初期圧力重心位置C0を測定する。把持対象物200を持ち上げる際に、柔軟構造10sは把持対象物200に働く外力(重力)Fに応じて変形するため、圧力重心位置Cが移動する。CとC0の差、つまり、重心位置の移動量Sを基にして滑りの発生を判定、予想し、滑り発生時には、把持力を増やす。
(もっと読む)
41 - 60 / 68
[ Back to top ]