
Fターム[3C007KV06]の内容
マニピュレータ、ロボット (46,145) | センサの方式 (946) | 電気式(例;静電容量) (195) | 歪ゲージ、感圧抵抗体 (93)
Fターム[3C007KV06]に分類される特許
1 - 20 / 93
加工ロボットの軌道追従装置と方法
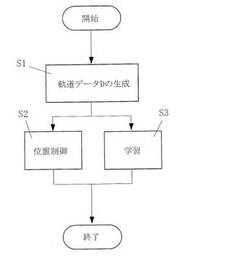
【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
把持装置

【課題】被把持物と接触する接触部を交換する必要が生じたとき、圧力センサ全体を交換することなく、その接触部のみ交換できるようにする。
【解決手段】把持装置は、両側に電極22a,22bが設けられた圧電素子21を電極22a,22bに接続された1対のフレキシブル基板23a,23bで挟み込んで形成された圧電振動型圧力センサ20を、ワークを把持する把持部6の指先部6a及び中節部6bに圧電素子21と1対のフレキシブル基板23a,23bを把持部6の把持力方向に配置して備え、さらに、把持部6に着脱可能に設けられた耐油性、耐薬性の弾性を有するゴム製の保護層24を備えている。被覆部材の劣化、傷、摩耗、ヘタリが生じても、圧電振動型圧力センサ全体を交換する必要がなく、保護層24のみを交換できる。
(もっと読む)
ロボットシステム及びロボットの異常検出方法
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、ロボットコントローラ150とを備えており、ロボット100は、アーム103L,103Rに設けられたセンサ122を有し、ロボットコントローラ150は、アーム103L,103Rが異常のない状態で所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記録する規範データ記録部163と、稼働時においてアーム103L,103Rが所定の動作を行う間のセンサ122の出力値Vの時間履歴を出力データとして記録する出力データ記録部167と、規範データ記録部163に記録された規範データと出力データ記録部167に記録された出力データとを比較することにより、アーム103L,103Rの異常の有無を判定する比較判定部164とを有する。
(もっと読む)
ロボット
【課題】ロボットアームの機械部品の異常の有無を精度良く検出すること。
【解決手段】ロボット100は、アクチュエータAc2〜Ac15を有するアーム103L,103Rと、アーム103L,103Rの筐体の先端近傍に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ130と、センサ130の近傍に設けられ、センサ130の出力信号をデジタル信号に変換するA/D変換器とを有している。
(もっと読む)
ロボット
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボット100は、アーム103L,103Rと、アーム103L,103Rに設けられ、アーム103L,103Rを駆動させるアクチュエータAc2〜Ac8と、アーム103L,103Rの内最も基端側に位置するアクチュエータAc2,Ac9の基部に設けられたセンサ固定治具121と、センサ固定治具121に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122とを有する。
(もっと読む)
ロボットシステム及びロボットの状態判定方法
【課題】ロボットの機能性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122と、センサ122の出力値Vに基づいて、ロボット100が常態であるか非常態であるかを判定する判定部164を備えたロボットコントローラ150とを有している。ロボットコントローラ150は、アーム103L,103Rが常態時に所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記憶する規範データ記録部163を有し、判定部164は、稼働時において、アーム103L,103Rが所定の動作を行う際のセンサ122の出力値Vの出力データと、規範データ記録部163に記録された規範データとを比較することにより、ロボット100が常態であるか非常態であるかを判定する。
(もっと読む)
基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法、及び基板位置補正方法
【課題】基板の位置ずれを検出することが可能な基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法を提供する。また、基板位置補正方法を提供する。
【解決手段】基板搬送用ロボットシステム10は、基板Wの下面に接触する接触部PBL、PFL、PBR、PFR及び接触部PBL、PFL、PBR、PFRに接触した基板Wの重心位置を検出するための複数のセンサSBL、SFL、SBR、SFRが設けられた基板搬送用ハンド60を有する基板搬送用ロボット20と、1)基板搬送用ハンド60上の基準となる位置にて基板Wが支持された際の各センサSBL、SFL、SBR、SFRの検出値である基準値と現在の各センサSBL、SFL、SBR、SFRの検出値との差分をそれぞれ演算する差分演算部70及び2)各差分に基づいて基板Wの位置ずれ方向を判断する第1の判断部72を有する第1の制御装置30とを備える。
(もっと読む)
剛性を有する複数の弾性ワイヤーを用いたパラレルメカニズム
【課題】従来のパラレルメカニズム等の多自由度機構は、一般的に構造が複雑で、柔軟性も低い。
【解決手段】本発明のパラレルメカニズムは、剛性を有する複数の弾性ワイヤーを合理的に用いて構成することにより、従来のパラレルメカニズムでは不可能であった柔軟な動きを行えるようにした多自由度機構を提供するものであり、即ち、剛性を有し、円形断面で単線の弾性ワイヤー1の複数本が、被駆動側部材2と駆動側部材3の各支点位置において同一配置となるように接続されており、また被駆動側部材と駆動側部材間には弾性ワイヤーを、横断面方向から見た配置を維持しつつ、軸方向に移動及び軸方向の回りに回転可能に支持する中間支持部材4が設けられているパラレルメカニズムである。
(もっと読む)
チャック装置
【課題】 装置全体の構造をシンプルにして低コスト化を図るようにする。
【解決手段】 チャック装置1は、先端側でワークWを把持可能なピンセット20と、ピンセット20の基端側に当接するアーム部30と、ピンセット20を弾性変形により開閉可能にするためにアーム部30をピンセット20に対して位置変位させる直動型ステッピングモータ40と、ワーク把持直前にピンセット20の閉速度を減速する、ピンセット20の閉状態の閉距離を調節する、又はワーク開放時のピンセット20の開速度を加速する等の機能を有したコントローラ50とを具備している。
(もっと読む)
器用なロボットの多軸ロードセルを較正する方法および装置
【課題】ロボットハンド内のロードセルを自動較正すること。
【解決手段】ロボットジョイントA,B,C,D,E,Fと、対応するジョイントの1つにおいてジョイント角度を測定するように構成された角度センサ15と、ロボット10の所定の姿勢の間に、ロードセル18の対応する1つに付与されるひずみ値のセットを測定するためのロードセルと、を備える。ホストマシン32は、ロードセルおよび角度センサに電気的に接続され、所定の姿勢の間にジョイント角度値およびひずみ値を受け取る。ロボットは、ロードセルの係合ペアを互いに圧して所定の姿勢を形成する。ホストマシンは、ジョイント角度およびひずみ値を処理するアルゴリズムを実行し、力バランス方程式内の誤差を最小化する全ての較正マトリックスのセットから、予め特定された値に最も近い較正マトリックスのセットを選択する。また、アルゴリズムを介してロードセルを較正する方法が提供される。
(もっと読む)
ロボットハンド
【課題】所望位置で把持対象物を把持可能なロボットハンドを提供する。
【解決手段】把持対象物であるティッシュボックスQや紙コップTを把持する指部81を備えた把持部99は、以下のように構成されている。即ち、指部81のリンク84の把持面84aの所望位置に、把持面84aから突出する突起部84eを設けた。突起部84eは、指部81のリンク84の把持面84aの略中央に形成されている。突起部84eは、シリコンゴムなどの弾性体によって形成されている。突起部84eは、シリコンゴム、ウレタンゴム、又は、クロロプレンゴムによって形成されている。把持面84aには、荷重位置を検出可能な接触抵抗式面センサ84bが設けられている。
(もっと読む)
開閉チャック
【課題】ワークの把持を正確に検出することが可能な開閉チャックを提供する。
【解決手段】爪によりワークを把持する開閉チャックであって、ガイドレールを有するガイド部材と、ガイドレール上を摺動するよう設置され、爪を取り付け可能な第1及び第2のスライダと、第1及び第2のスライダが互いに離間又は接近するよう、第1及び第2のスライダを摺動させる駆動源と、ガイド部材において、第1及び第2のスライダに取り付けられた爪がワークを把持した際にひずみが生じる位置に取り付けられたひずみセンサと、を備える開閉チャック。
(もっと読む)
学習制御機能を備えたロボット
【課題】大部分の現場において、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部と、ロボット機構部の動作を制御する制御装置とを含むロボットであって、制御装置は、ロボット機構部の動作を制御する通常制御部と、作業プログラムによりロボット機構部を動作させて、センサによって検出した前記ロボット機構部の制御対象位置を通常制御部に与えられた目標軌跡もしくは位置に近づけるために学習補正量を算出する学習を行う学習制御部と、を有し、学習制御部は、学習稼動状態で設定可能な最大速度オーバライドを算出し、最大速度オーバライドに至るまで複数回に渡って速度オーバライドを増加させながら学習補正量を算出する学習を行うことを特徴とする。
(もっと読む)
基板搬送装置及び基板搬送方法並びに記憶媒体
【課題】基板載置部から基板を受け取ったときに基板の姿勢が異常な状態であるか否かを確実に検出すること。
【解決手段】前記フォーク3Aを基体31に沿って前進させ、ウエハWを保持する突き上げピン73に対して上昇させることにより、当該突き上げピン73上のウエハWをフォーク3Aに受け取る。このときに前記保持爪30A〜30Dの各々に設けられた歪みセンサ4A〜4Dにより、保持爪30A〜30Dに上から荷重が加わったときの当該保持爪30A〜30Dの歪み量を検出する。各々の歪みセンサの歪み量に基づいて、ウエハWの姿勢が正常であるか否かを判断し、ウエハWの姿勢が異常であると判断したときに、前記フォーク3Aの後退を禁止する。
(もっと読む)
基板搬送用装置
【課題】 基板保護、装置保護のための基板有無検出、および衝突検出を小型、低コストな1つのセンサにて精度よく検出し、基板の大型化に対する鉛直方向の振動についても同時に低減できる基板搬送用装置を提供する。
【解決手段】 エンドエフェクタに取り付けたひずみセンサと、ひずみセンサ出力から基板有無を検出する基板有無検出部と、衝突有無を検出する衝突有無検出部と、鉛直方向の振動を低減する振動低減部を備える。
(もっと読む)
ロボットの駆動システム、及び、ロボットの駆動プログラム
【課題】 形状が複雑で自己遮蔽の多い動作物の動作にもとづき、見まね(非接触的方法)によりロボットを駆動するシステムを提供することにある。
【解決手段】 ロボットの複数の画像データと事前収集動作指令とを対応付けて画像対応動作指令記憶手段11に記憶する。ロボットを動作させるために、動作物に所望の動作を行わせ、その際に動作物の画像データを時系列でロボット動作用画像データとして取得する。画像データ特定及び動作指令発生装置14は、ロボット動作用画像データに含まれる画像データに対応する画像データを画像対応動作指令記憶手段11に記憶している複数の画像データから時系列で特定し、特定した画像データに対応する事前収集動作指令を動作指令としてロボットに与えてロボットを駆動する。これによりロボットは、動作物の形状の複雑さや自己遮蔽を解消して見まねにより動作する。
(もっと読む)
ロボット制御装置
【課題】ロボットと外部環境との接触を高感度・高精度に検出可能なロボット制御装置を提供する。
【解決手段】歪み検出センサ2を基台部に備えた多関節ロボット1を制御して予め教示された作業プログラム4を実行させ、作業プログラム4を実行中にセンサ2の出力からロボット1と外部環境との接触を検出するロボット制御装置において、制御装置3は、作業プログラム4を実行中にセンサ出力に対してフィルタ処理を行うフィルタ処理部85と、フィルタ処理部85のフィルタリング結果を用いてロボットと外部環境との接触状態を認識する状態認識部86とを備え、フィルタ処理部85は、作業プログラム4を実行中のロボット1の動作形態に応じてセンサ出力に対するフィルタ処理のカットオフ周波数を動的に変更する。
(もっと読む)
ロボットアーム制御装置、その制御方法及びプログラム
【課題】安全性を向上させたロボットアーム制御装置、その制御方法及びプログラムを提供すること。
【解決手段】ロボットアーム制御装置1は、複数の関節部を有するロボットアーム2と、ロボットアーム2に対して作用する外力を検出する外力検出手段と、外力検出手段により検出されたロボットアーム2の外力に基づいて、ロボットアーム2のインピーダンス制御を行う際の位置補正量を算出する位置補正量算出手段と、ロボットアーム2の移動目標位置を指定するための手先位置指令値を生成する指令値生成手段と、位置補正量算出手段により算出される位置補正量と、指令値生成手段により生成された手先位置指令値と、に基づいて、ロボットアーム2の各関節部の駆動を制御する駆動制御手段と、を備えている。指令値生成手段は、位置補正量算出手段により算出される位置補正量が所定量以下になるまで、手先位置指令値の生成を停止する。
(もっと読む)
コンロッドのクランプ装置
【課題】コンロッドを加工装置で機械加工する際に、様々な車種に対応するために形状や大きさの異なるコンロッドであっても簡易な構成でクランプすることができる、コンロッドのクランプ装置を提供する。
【解決手段】本実施形態に係るクランプ装置10は、取付け部20に固定された状態で前方に延出する棒状の支持部31と、該支持部31に連結された状態で同じく前方に延出する棒状の可動部51とを備え、支持部31及び可動部51に、位置決め機構、大端部クランプ機構、小端部クランプ機構、第一の駆動機構等の各機構が配設される。
(もっと読む)
多関節ロボットシステム、多関節ロボット、力測定モジュール、力測定方法およびプログラム
【課題】 多関節ロボットのリンクおよび関節に作用する力やモーメントを測定すること。
【解決手段】 本発明の多関節ロボットは、関節部に設けられ、駆動力発生側の駆動軸および駆動力出力先のリンク174側の出力軸176それぞれに、軸心から離間した箇所で固定され、該箇所に作用する偶力に応じて弾性的に曲げ歪みを発生する歪み発生部材190と、歪み発生部材190に接して配置され、曲げ歪みを検出する歪みセンサとを含む。測定制御手段は、関節部の軸まわりに発生する負荷トルクを歪みセンサの出力値から算出し、仮想仕事の原理に従って関節部の負荷トルクからリンクに作用する力に換算する演算手段を含む。
(もっと読む)
1 - 20 / 93
[ Back to top ]