
Fターム[3C007LS15]の内容
マニピュレータ、ロボット (46,145) | 教示(プログラム作成) (978) | 経路や目標位置の自動作成 (243)
Fターム[3C007LS15]の下位に属するFターム
基本経路の座標変換等によるもの (10)
Fターム[3C007LS15]に分類される特許
1 - 20 / 233
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
加工ロボットの軌道追従装置と方法

【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの追従遅れなしに、高精度の加工をすることができる加工ロボットの軌道追従装置と方法を提供する。
【解決手段】(A)ワークのCADモデルから軌道データを生成して記憶装置に記憶し、(B)加工前に、軌道データに沿って、加工速度より低速の倣い速度で、ワークを加工することなくワークを倣い、その動作位置から軌道データを修正して目標軌道を設定し、(C)次いで、目標軌道に基づき、ワークと接触させることなく加工速度で加工工具を位置制御して、軌道データを再修正する学習を繰返して加工に使用する目標軌道データとして記憶し、(D)加工時に、学習後の軌道データに基づき、加工速度で加工工具を位置制御してワークを加工する。
(もっと読む)
動作プログラムの自動生成プログラムおよび装置
【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
移動制御装置及び移動制御方法、並びにコンピューター・プログラム
【課題】マニピュレーターのリーチング動作や移動ロボットの移動など、自動機械の移動を好適に制御する。
【解決手段】自動機械の現在位置及び最終目標位置をパラメトリック曲線の端末とみなし、これら2点を結ぶパラメトリック曲線を内分比r:1−rで内分する内分点を、仮想バネ・ダンパ系の平衡点、すなわち仮目標位置として算出する。そして、この仮目標位置を2次のフィルターで鈍らせ、目標位置xdの生成を行なう。複雑な経路への追従制御が実現されるとともに、ベースとなるオンライン目標位置整形の特徴である対外乱適応能力を両立した移動制御器を構成できる。
(もっと読む)
ロボットの運動方法決定装置、ロボットの運動方法決定方法、及び、そのプログラム
【課題】対象ロボットの動力学モデルが不明な場合でも、最適な軌道を決定することが可能なロボットの運動方法決定装置を提供する。
【解決手段】本発明に係るロボットの運動方法決定装置100は、ロボットが第1の位置から第2の位置へ移動するように、ロボットが備える複数の駆動部を制御するための制御値の候補の組である制御値候補を決定し、決定した制御値候補をロボットに送信する実機制御部102と、制御値候補によって制御されている複数の駆動部の駆動状態を示す物理量である実測値を取得する実測値取得部104と、実測値から、実測値に対応する制御値候補の評価値を決定する評価部106と、評価値に基づいて、制御値候補を、ロボットの運動方法を決定するための制御値の組として採用するか否かを決定する制御値決定部108とを備える。
(もっと読む)
ロボット教示データの算出方法およびロボットのコントローラ
【課題】第1のロボットの動作を第2のロボットに実行させる。
【解決手段】第1のロボットRAの動作を第2のロボットRBが実行できるように、第1のロボットRAに対する第1の教示データθAから第2のロボットRBに対する第2の教示データθBを算出するロボット教示データの算出方法であって、第1の教示データθAに対する第1のロボットRAの基準点SAの位置PAを、第1の教示データθAと第1のロボットRAの構成内容を示す第1のロボット構成データとに基づいて算出し、前記算出した位置PAに第2のロボットRBの基準点SBが位置するための第2の教示データθBを、前記算出した位置PAと第2のロボットの構成内容を示す第2のロボット構成データとに基づいて算出する。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
アーク溶接ロボットにおいてトーチ姿勢の教示が煩雑である。
【解決手段】
ロボット制御装置RCは、トーチTの姿勢を規定するトーチ姿勢ファイルを作成するCPUと記憶部を備える。トーチ姿勢ファイルは、溶接線上の教示点または溶接開始命令の1パラメータとして設定される。ロボット制御装置RCは、作業プログラムを再生する際、トーチ姿勢ファイルが設定された教示点、またはトーチ姿勢ファイルが設定された溶接開始命令が有効となる教示点におけるトーチ姿勢を算出する。角度パラメータを、作業プログラムとは別のファイルとすることで、一度教示したトーチ姿勢の再利用を可能とすると共に修正も容易となる。
(もっと読む)
自律移動サービス提供システム
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
ロボット制御装置、ロボットおよびロボット制御装置の教示方法
【課題】撮影動作の教示操作が煩雑になるのを抑制することが可能なロボット制御装置を提供する。
【解決手段】このロボットシステム100は、教示位置の入力と、少なくとも教示位置に対応付けられるコマンド情報の選択とを受け付けて教示位置とコマンド情報とを組み合わせた教示データを作成する教示装置3と、教示データに基づいて動作指令を生成する指令生成部24とを備え、教示装置3により選択されるコマンド情報は、教示位置と、予め設定された教示位置に基づく補助的な動作をロボットに動作させるための補助情報とに対応付けられたステレオ視コマンドを含む。
(もっと読む)
ロボット及びその制御方法
【課題】経路計画の計算量を低減することができるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1の制御方法は、認識部21と、記憶部22と、ハンド部133が設けられたアーム13と、を備え、周囲に障害物91が存在する対象物90にハンド部133を接近させるようにアーム13の動きを制御するロボットの制御方法である。ロボット1は、認識部21により、対象物90の位置情報と、障害物91の固有の情報と、を取得する。ロボット1は、障害物91の固有の情報に対応して記憶部22に予め格納され、ハンド部133が障害物91を回避して対象物90に向かう軌道に関する軌道情報を取得する。そして、ロボット1は、軌道情報に基づいて、アーム13の動きを制御する。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
経路生成装置および経路生成方法
【課題】C空間における過剰な計算を排除して、動作経路計画工数を低減する。
【解決手段】初期位置記憶手段と、目標位置記憶手段と、現在位置検出手段と、経路記憶手段と、現在位置隣接コンフィギュレーション点を求める第1候補判断手段と、現在位置隣接コンフィギュレーション点のうち障害物との干渉点に隣接する干渉点隣接コンフィギュレーション点を求める第2候補判断手段と、現在位置隣接コンフィギュレーション点が干渉点であるかどうかを判断する干渉チェック手段と、現在位置隣接コンフィギュレーション点のうち現在位置から目標コンフィギュレーション点に近づくようにコンフィギュレーション点を選定する距離候補判断手段と、を備え、現在位置において前記距離候補判断手段により選定された距離候補コンフィギュレーション点が干渉点でない場合には、直進モード経路を生成し、干渉点である場合には境界追従モード経路を生成する。
(もっと読む)
円滑経路生成装置および円滑経路生成方法
【課題】動作経路から余分な動作を削減して円滑な動作経路を再生成する。
【解決手段】動作経路記憶手段と、経路途中点設定手段と、経路途中点記憶手段と、経路途中点のうち対となる一の経路途中点、および他の経路途中点からなる経路途中点対を採択する経路途中点対採択手段と、一の経路途中点と他の経路途中点との中間点を、計算式(一の経路途中点の位置データ+他の経路途中点の位置データ)/2から求める中間点演算手段と、中間点が障害物と干渉するかどうかを判断する中間点干渉チェック手段と、を備え、中間点が障害物と干渉する場合には、現在のままの動作経路を採択し(S7)、干渉しない場合には、当該中間点を新経路途中点として採択し、一の経路途中点から当該新経路途中点を通って他の経路途中点まで進む新動作経路に変更する円滑経路生成ステップを実行(S6)する円滑経路生成装置。
(もっと読む)
ロボット及びその制御方法
【課題】対象物を認識しながらアーム等を対象物まで近づけることができる新規なロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、頭部11、ロボット本体12、アーム13、カメラ14、物体認識部15、認識空間算出部16、軌道算出部17、可動制御部18を備える。カメラ14は、ロボット本体12の周囲の物体の環境情報を取得する。物体認識部15は、カメラ14が取得した環境情報に基づいて、ロボット本体12の周囲に存在する把持対象物90を認識する。認識空間算出部16は、物体認識部15により把持対象物90を認識するために必要とする空間としての認識空間20を算出する。軌道算出部17は、アーム13が、認識空間20への侵入を回避しつつ、把持対象物90に向かう軌道を算出する。可動制御部18は、アーム13の認識空間20への侵入を回避するように、アーム13の動きを制御する。
(もっと読む)
ロボットの軌道計画システム及び軌道計画方法
【課題】ロードマップを用いて軌道計画を行う場合に、複雑な環境下でも指定されるタスクに応じた軌道計画を実現可能とし、かつ、軌道算出可能性を保証しつつ軌道計画に要する処理コストを低減可能とする。
【解決手段】ロボットの軌道計画システム20は、タスク種類と、初期姿勢と、最終姿勢と、に応じて構成された複数のノードがそれぞれ登録された複数のロードマップを記憶するロードマップ記憶部21と、入力されるタスク種類と、入力される初期姿勢及び最終姿勢と、から、対応するロードマップIDを特定するロードマップ選択器22と、周辺の環境情報を取得する環境情報取得器23と、ロードマップIDから対応するロードマップを特定して、入力される初期姿勢及び最終姿勢と、環境情報と、から、軌道を計画する軌道計画器24と、を備える。
(もっと読む)
ロボットによるバリ除去方法
【課題】ロボットに取り付けた工具を位置制御により移動させてワークの大型のバリ取りを行う際に、位置制御のための膨大なティーチング作業を省くことができる、ロボットによるバリ取り方法を提供する。
【解決手段】ディスプレイ19aの表示画面上で選択されたワーク15のCADデータから、そのワーク15の設計上の形状(表面形状)を示す設計上の形状データを生成する。また、生成した形状データを用いて、ワーク15のロボット1に対する実際の方向と設計上の形状とを示す位置姿勢データを生成する。そして、生成した位置姿勢データで示される位置姿勢のワーク15の表面に沿って、エンドエフェクタ23,25を位置制御により移動させる。
(もっと読む)
ロボット制御装置
【課題】複数の教示データを並行に起動して複数の制御対象の同期を取る方法では、同期ズレが発生する場合がある。
【解決手段】複数の制御対象A、B、Pを同期させて駆動するロボット制御装置1である。教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された1つまたは複数の制御対象を、教示対象として設定する。教示対象作成処理部7は、教示対象毎に教示データを作成する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。解釈実行部11は、再生データTdに基づいて複数の制御対象を同時に駆動する。教示作業は所望の制御対象毎に行い、これらを合成した再生データTdに基づいて再生運転することにより、教示作業が行いやすく、且つ再生運転時に同期ズレが発生することがないロボット制御装置を提供することができる。
(もっと読む)
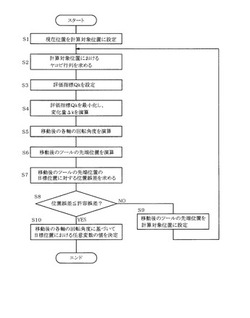
ロボットの角度データ変換方法及び装置
【課題】 冗長自由度ロボットに対しても角度データを変換可能で、ツール先端位置誤差の補正と関節角度リミット回避や障害物回避との両立を可能とする。
【解決手段】
幾何学的誤差を各々考慮した交換前ロボット及び交換後ロボットのツール先端位置ベクトルを計算し(S301-303)、これらベクトル間の誤差ベクトルを計算し(S304)と、幾何学的誤差を考慮した交換後ロボットの角度データに対するヤコビ行列を計算し(S307)、誤差ベクトルとヤコビ行列の逆行列または擬似逆行列とに基づいて角度補正ベクトルを計算し(S308)、関節角度リミット回避及び障害物回避を考慮した評価関数を使って角度補正ベクトルを修正し(S309)、修正した角度補正ベクトルで交換後ロボットの角度データを補正する(S310)、各工程を備え、誤差ベクトルの絶対値(S305)が閾値未満となる(S306肯定判定)まで、処理を繰り返す。
(もっと読む)
ロボット制御装置
【課題】マニピュレータA、BおよびポジショナPを並行起動して、2パスのアーク溶接作業を実行させるロボット制御装置において、教示データをマニピュレータAとポジショナPの組合せ、またはマニピュレータBとポジショナPの組合せにより独立して作成する場合、一方の教示データに対して教示点の編集操作を行ったときに他方の教示データにも同様の編集操作を行う必要がある。
【解決手段】教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された複数の制御対象を教示対象として設定する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。教示データ自動修正部9は、一方の教示データに対する編集操作が行われたときに、編集操作の内容に応じて他方の教示データを自動的に修正する。教示工数の低減及び教示ミスの防止が期待できる。
(もっと読む)
制御装置
【課題】処理負荷が増大することを抑制しつつ、ロボットに相互作用を伴うタスクを実行させることができるロボットの制御装置を提供する。
【解決手段】第1対象物T1に対して非接触状態から接触状態へ遷移する第1動作区分D1および第1対象物T1に対して接触状態から非接触状態へ遷移する第2動作区分D2では、ロボットRまたはロボットRと一体となった第2対象物T2と第1対象物T1との干渉判定を省略する。一方、これらの動作区分に連続する第3動作区分D3では、第1対象物T1を含めて干渉判定を実行する。
(もっと読む)
1 - 20 / 233
[ Back to top ]