
Fターム[3C007LU06]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 力制御 (227)
Fターム[3C007LU06]の下位に属するFターム
Fターム[3C007LU06]に分類される特許
61 - 80 / 125
ワイヤ駆動機構、ロボットアーム機構及びロボット
【課題】軽量で、コンパクトにできるワイヤ駆動機構、ロボットアーム機構及びロボットを提供する。
【解決手段】回転軸2を中心に回転するプーリ1と、回転軸2と直交する方向で、回転軸2と同一平面上にあるように配置される回転軸4を中心に回転するプーリ3と、プーリ1周面の所定方向に巻きつけられるとともに、プーリ3周面にプーリ1の巻きつけ方向と反対方向に巻きつけられるワイヤ5を有し、一方のプーリ1の回転によるワイヤ5の引っ張り力により他方のプーリ3に駆動力を伝達可能にする。
(もっと読む)
組立方法及び組立装置

【課題】部材の移動操作の精度を特段に向上させる必要を生ずることなく、軸部品102の孔への挿入を短時間で完了することができ、さらに、軸部品102を孔部品101に押し付けたままで移動させることがない組立方法及び組立装置を提供する。
【解決手段】孔部品101又は軸部品102のいずれかを把持して移動操作して孔103に軸部品102を挿入する組立方法において、孔103に軸部品102を挿入させるときに軸部品102の先端部と孔103の周囲部とが当接した場合に孔部品101が受ける挿入方向の並進力及びこれに直交する軸周りのモーメントを検出し、検出された並進力及びモーメントに基づく演算を行い軸部品102の先端部の当接位置の孔103の中心からの方向及び距離を算出し、算出された方向及び距離に応じて孔部品101、または、軸部品102のいずれかを移動操作して、軸部品102を孔103に挿入させる。
(もっと読む)
協調作業ロボットとその制御方法
【課題】作業者(人間)が操作の主体であり、一人では運搬し位置決めすることが困難なオブジェクトを一人の作業者の意図に沿ってその作業者との協調作業により効率よく運搬し正確に位置決めすることができる協調作業ロボットとその制御方法を提供する。
【解決手段】人間一人では運搬し位置決めすることが困難なオブジェクト1を、人間の意図に沿って人間との協調作業により運搬し位置決めする協調作業ロボット。オブジェクト1の一端部をフリージョイント12を介して把持し3次元的に移動可能なロボットハンド10と、オブジェクトの他端部を把持する人間が作用する捩りトルクを検出するトルクセンサ17と、ロボットハンドに他端部から作用するスラスト力を検出するスラストセンサ15と、オブジェクトのロボットハンドに対する変位角を検出する角度センサ14と、捩りトルク、スラスト力及び変位角から人間の意図を検出し、ロボットハンドの3次元位置を制御する制御装置20とを備える。
(もっと読む)
ロボット把持制御装置及びロボット把持制御方法
【課題】ロボットから人に把持物を渡す際に把持力の制御をリアルタイムで行い、人と人が物品を授受するかのようにロボットハンドの制御を実現する。
【解決手段】ロボットアーム101に物品を把持する機構をなすロボットハンド102と、前記ロボットハンド102に作用する力を検知する力センサ103を設け、前記ロボットハンド102が物品を把持した状態で、力センサ103で検知したロボットハンド102に作用する力が変化した場合に、把持力制御手段108によりロボットハンド102が物品を把持する力を解放する信号である解放指示を出力し、ロボットの把持している物品を人と人が物品を授受するかのように持ち取ることを可能とする。
(もっと読む)
作業用マニピュレータの制御装置
【課題】特異点に接近もしくは通過するような目標軌道を与えられた場合でも、計算上の破綻なく連続してマニピュレータを動作させて作業を続行可能とする。
【解決手段】作業用マニピュレータの制御装置は、目標値生成手段101、感度パラメータ計算手段103、対応感度計算手段105、複数の制御手段109〜113、制御方式切替手段107、及び外力検出手段を備える。感度パラメータ計算手段103はマニピュレータ機構からの関節変位応答を用いて感度パラメータを計算し、対応感度計算手段105は感度パラメータを用いて対応感度を計算し、制御方式切替手段107は対応感度に基づいて制御手段109〜113の切り替えを行う。各制御手段109〜113は、目標値、関節変位応答、外力検出手段で検出された外力、及び感度パラメータを用いて制御処理を行う。
(もっと読む)
作業用マニピュレータ
【課題】作業用マニピュレータにおいて、実装が簡素で耐環境性や信頼性や対人親和性を良好なものとしつつ、非定型作業や定量性のある作業を可能とすること。
【解決手段】作業用マニピュレータは、移動部及び制御部を有するロボット等の移動体と、移動体に付属され、作業対象との接触状態を検出する接触センサ及び接触時の接触力を検出する力センサを有するマニピュレータ部とを備える。制御部は接触センサで検出された接触状態または力センサで検出された接触力に基づいて作業状態を把握する手段を備えていると共に、接触センサまたは力センサで検出された人工的な規則性を有するパターン情報を命令として解釈する手段を備えている。
(もっと読む)
外骨格のアクチュエータを制御するシステム
【課題】制御信号源としてEMGを必要としない、能動挙動から生ずる多用途な支援を提供する外骨格制御方法を提供する。
【解決手段】外骨格に能動インピーダンスを表示させることが可能な制御装置付の外骨格を使用することによってユーザを支援するシステム及び方法を提供する。外骨格は、ユーザが下肢を動かすために必要とする筋負担を減少することによって、ユーザを支援する。ある実施形態においては、単一自由度(1−DOF)の外骨格は、能動インピーダンス制御装置を使用する単一関節動作によってユーザを支援する。他の実施形態においては、複数自由度(multi−DOF)外骨格は、能動インピーダンス制御装置を使用する複数関節動作によってユーザを支援する。
(もっと読む)
作業補助装置および複合パンタグラフ機構
【課題】構造の簡略化を図るとともに汎用性の高い作業補助装置を提供する。
【解決手段】本発明に係る作業補助装置A1は、支持ベース1と、支持ベース1に対してZ軸方向に伸縮するZ軸駆動機構2と、Z軸駆動機構2に対して基端部が接続され、この基端部に対して先端部がX軸,Y軸方向に沿って揺動する揺動駆動機構3と、上記先端部に接続され、XYZ方向に操作可能な操作部材4と、操作部材4のXYZ方向の操作力を個別に検出する操作力検出手段5と、操作力検出手段5からの情報に基づきZ軸駆動機構2および揺動駆動機構3を操作部材4の操作方向への移動を支援するように制御する制御手段とを備える。また、揺動駆動機構3は、上記基端部に対して上記先端部がX軸に沿って揺動可能な第1のパンタグラフ機構と、上記基端部に対して上記先端部がY軸に沿って揺動可能な第2のパンタグラフ機構との複合パンタグラフ機構によって構成される。
(もっと読む)
ロボット制御装置
【課題】ロボットアーム先端部分の移動方向を比較的大きく変化させる場合であっても、ワークをより正確に加工する。
【解決手段】ロボットアーム(50a)の先端に取付けられた作業ツール(52)とワーク(60)との間に作用する力を制御するロボット制御装置(10)が、制御をおこなう際に必要な力データを取得する力測定手段(51)と、作業ツールから前記力測定手段に及ぼされる力のうち、重力が作用する力と前記ロボットアームの運動により発生する動力学項とを算出する算出手段と、算出手段により算出された、前記重力が作用する力と前記動力学項とを用いて、前記力測定手段により測定された力を補正する補正手段(14)と、動力学項が所定の閾値より大きい場合には、前記動力学項および前記重力により前記力測定手段に及ぼされる力に応じて、前記ロボットアームの動作指令を調整する指令調整手段(12)と、を具備する。
(もっと読む)
ロボットの直接教示装置
【課題】誘導力を加える教示作業者の意図を理解して教示作業中に力制御の操作感を自動的に変更し、もって教示作業の能率と位置決め精度とを向上する実用的な直接教示装置を提供する。
【解決手段】多関節ロボット1の先端部に力センサ3を介して設けられた操作ハンドル4を備え、教示作業者が操作ハンドル4に加える力を力センサ3により検出し、その力に応じて力制御によりロボット1を所望の位置へと誘導し教示を行うロボットの直接教示装置において、力センサ3によって検出される力の変化量とロボット1の動作速度の変化量に応じて、ロボット1の動作状態を所定の複数の状態のいずれかに判別する動作状態判定手段65と、動作状態判定手段65の判定結果に従い、ロボット1の誘導中に力制御のモデルを動的に変更するモデル変更手段66とを備える。
(もっと読む)
ロボット制御装置
【課題】仮想バネ等が作用される方向において円滑な動作が妨げられるのを抑制する。
【解決手段】ロボットのツールと作業対象物との間に仮想バネまたは仮想ダンパを作用させる柔軟制御を行うロボット制御装置(RC)において、柔軟制御を行う際に、柔軟制御が開始される柔軟制御開始位置と仮想バネまたは仮想ダンパとに基づいてロボットの複数の関節軸(J1〜J6)から特定の関節軸を選択し、該特定の関節軸の位置ゲインおよび/または速度ゲインを特定の関節軸の位置ゲイン通常値および速度ゲイン通常値よりも低減させるゲイン低減手段(41、42)と、柔軟制御を行う際に、柔軟制御開始位置と仮想バネまたは仮想ダンパとに基づいて算出された特定の関節軸の補正トルクを前記特定の関節軸の補正トルク通常値よりも低減させる補正トルク低減手段(43)とを含む。
(もっと読む)
作業補助装置
【課題】作業者が対象物を移動する作業を補助する作業補助装置を提供する。
【解決手段】作業補助装置100は、把持装置10と、把持装置10を回転軸Qの回りに回転可能に連結する移動装置20を備える。対象物Wは把持装置10と作業者Tにより保持される。作業者Tが対象物Wを回転させると、作業補助装置は、対象物Wの姿勢角と目標姿勢角の偏差が小さくなる方向の回転を対象物に与えると推定される「回転軸の移動方向と移動量」を指定する第1移動指令値を算出する。第1移動指令値に従って移動装置を移動させる。把持装置10と移動装置20は回転可能に連結されているため、回転軸Qが移動する際の対象物Wの回転は回転軸Qと作業者Tの位置関係で規定される。作業者Tは、回転軸Qが移動する際の対象物Wの回転を理解しやすい。作業補助装置は、作業者Tが理解し易いように対象物Wを移動させることができる。
(もっと読む)
作業復帰方法及び作業復帰装置
【課題】作業装置の異常停止時の状態に関わらず作業装置を原位置に復帰させることが可能であり、作業装置に精通していない作業者でも容易に対応可能な柔軟性のある作業復帰方法及び作業復帰装置を提供する。
【解決手段】第1ステップでは、作業装置をアシストモードに設定する(第1設定工程)。第2ステップでは、作業者が作業装置を異常停止位置から待避位置へ待避させる(アシスト動作・制御工程)。このとき、作業者の人力の大きさ、方向に応じて作業装置の移動を制御する。第3ステップでは、作業装置を自動復帰モードに設定する(第2設定工程)。第4ステップでは、作業装置を待避位置から原位置に自動復帰させるように制御する(復帰制御工程)。第5ステップでは、作業装置の原位置への復帰が完了する。
(もっと読む)
ロボットハンド装置
【課題】物体に衝撃を与えることなく、物体を置くことができるロボットハンド装置を提供することを課題とする。
【解決手段】ロボットハンドで物体を把持し、把持した物体を所定の場所に置くロボットハンド装置であって、ロボットハンド装置のベースの座標系からロボットハンドの座標系へのロボットハンドの姿勢によってロボットハンドの座標系における指先合力をロボットハンド装置のベースの座標系における指先合力に変換し、当該ロボットハンド装置のベースの座標系における指先合力の中の鉛直方向の指先合力に基づいて物体の重量を推定し、推定した物体の重量とロボットハンドにおける物体を把持する力との差から物体を置く場所から受ける反力を演算し、ロボットハンドで把持した物体を置くときに、演算した反力が閾値を超えた場合にロボットハンドから物体を離す制御を行うことを特徴とする。
(もっと読む)
ロボットおよびロボットの制御方法
【課題】嵌合部品を効果的に加振し、スムーズに挿入作業を行って作業効率を向上することができるロボットおよびロボットの制御方法を提供する。
【解決手段】双腕アーム2のうち、一方のハンド4によって把持した嵌合部品6を被嵌合部品7に近づけ、嵌合部品6を把持したハンド側の力センサ3により嵌合部品6が被嵌合部品7に接触したことを検出し、嵌合部品6に応じて予め記憶された嵌合部品6の所定の位置に、他方のアーム2のハンド4により打撃力を与え、振動を発生させた後に、把持側のアーム2を挿入方向へ動かして嵌合部品6を被嵌合部品7へ挿入する。
(もっと読む)
回動調整装置及び回動装置の制御方法
【課題】回動装置を使用する際の消費エネルギを節減するとともに、回動装置やこれを駆動する駆動装置の磨耗や損傷を抑制する。
【解決手段】複数の回動軸(12a、12c、14a)を介して連結された複数の部材(体幹部材11、上腕部材13、前腕部材15)を有し、回動軸を中心とした一の部材に対する他の部材の相対的な回動運動を実現させる回動装置(動作補助装着具10)を備えるとともに、回動装置による複数の回動運動のうち少なくとも何れか一つを抑制する回動抑制手段(ロック機構30、回動抑制部62)を備える回動調整装置(装着式動作補助装置1)である。
(もっと読む)
制御装置
【課題】繰り返し試行する時間を省くことで力制御ゲインの設定及び調整を容易に行うことができる制御装置を提供する。
【解決手段】力制御回路7の内側に位置制御回路8を有する力制御システムによりロボット1を力制御する制御装置において、ロボット1を駆動する実際の制御条件で、ロボット1の個々の駆動軸に関する位置制御回路8の時定数Tを取得する時定数取得手段11と、ロボット1を駆動する実際の制御条件で、ロボット1の剛性値Kを取得する剛性値取得手段12と、力制御回路7の時定数が位置制御回路8の時定数Tより大きくなる条件で、時定数取得手段11で取得された位置制御回路8の時定数Tと剛性値取得手段12で取得された剛性値Kとから力制御回路7の力制御ゲインを算出するゲイン自動算出手段10と、を備える。
(もっと読む)
触覚制御方法および触覚制御装置
【課題】複数台のロボットによる触覚情報の共有制御を実現可能にする。
【解決手段】第1外乱オブザーバ11,12,15と第2外乱オブザーバ51,52,53によって、マスタ1,2およびスレーブ5を加速度次元で制御する。これにより、システムのロバスト性を確保しつつ、マスタ1,2およびスレーブ5の位置変位をそれぞれゼロにする位置制御と、マスタ1,2およびスレーブ5が作用・反作用の法則を満たすような力制御を、仮想空間上で各々独立して行なうことが可能になる。そのため、それまでマスタとスレーブが1対1のシステムでしか実現し得なかった触角共有制御を、2台以上のマスタ1,2と1台以上のスレーブ5とにより実現できる。
(もっと読む)
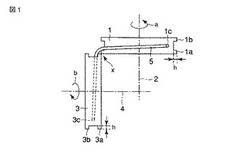
ロボットアーム
本発明にかかるロボットアームの代表的な構成は、必要に応じて連結される1つまたは複数の枢動式レバーから形成されるロボットアームであって、枢動式レバーが、支持材、基部、枢動可能な部品および複数の空気圧人工筋を備え、基部が、支持材の一方の端部に強固に接続され、枢動可能な部品が、支持材の長手方向から発散するように位置合わせされる1つまたは2つの軸を中心にして枢動可能である支持材の第2の端部上に装着され、空気圧人工筋が、基部から枢動可能な部品まで伸張し、個別の空気圧人工筋が、枢動可能な部品の枢軸の対向する側で枢動可能な部品に係合し、連結される枢動式レバーの場合には、1つの枢動式レバーの基部が、このように連結される次の枢動式レバーの枢動可能な部品に強固に接続され、
コントローラが、個別の枢動式レバーの位置および個別の空気圧人工筋に印加される圧力を測定して、個別の空気圧人工筋の圧力−変位図と、空気圧人工筋に設けられるすべての枢動式レバーに関する幾何的なレバー比を含むことによって、外部から作用される力を計算し、これらの力を制限することを特徴とする。  (もっと読む)
(もっと読む)
脚式移動ロボットの制御装置
【課題】人と手をつないで歩行するなど人との接触を可能にしてコミュニケーション機能を向上させると共に、そのときの姿勢を安定に保つようにした脚式移動ロボットの制御装置を提供する。
【解決手段】ハンドを介して人に接触したとき、人から作用する外力を検出し(S26,S34,S36)、検出された外力に基づいて人の進行方向を推定し、推定された進行方向に基づいて歩容を生成し(S44)、生成された歩容に基づいて少なくとも脚部アクチュエータの動作を制御する(S50,S52)。また、人の手を引いて歩行する案内動作も実行する。
(もっと読む)
61 - 80 / 125
[ Back to top ]