
Fターム[3C007LU06]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 力制御 (227)
Fターム[3C007LU06]の下位に属するFターム
Fターム[3C007LU06]に分類される特許
41 - 60 / 125
ロボット及びその協調作業制御方法

【課題】 一つのエンドエフェクタに対する他のエンドエフェクタの相対ヤコビアンを用いるインピーダンス制御を通して作業空間の制約なしに協調作業を遂行することができるロボット及びその協調作業制御方法を提供する。
【解決手段】 作業を遂行する複数のマニピュレータにそれぞれ設けられたエンドエフェクタの絶対座標位置を計算し、前記各エンドエフェクタの絶対座標位置から相対座標位置を計算し、前記相対座標位置を用いて前記複数のマニピュレータの関節トルクを計算し、前記関節トルクによって前記複数のマニピュレータの協調作業を制御する。
(もっと読む)
医療用ロボット、および医療用ロボットのパフォーマンス要求事項を充足する方法
本発明は、医療用ロボット(R)、および医療用ロボット(R)のパフォーマンス要求事項を充足する方法に関する。ロボット(R)は、複数の軸(1〜6)と制御装置(17)とを有する。医療用工具(21〜24)は、ロボット(R)の取付装置(18)に取り付けられ、ロボット(R)の作業領域(30)は、そのロボット(R)がそれら医療用工具(21〜24)のパフォーマンス要求事項を充足するように、特に信頼度の高い技術で制御装置(17)によって設定される。 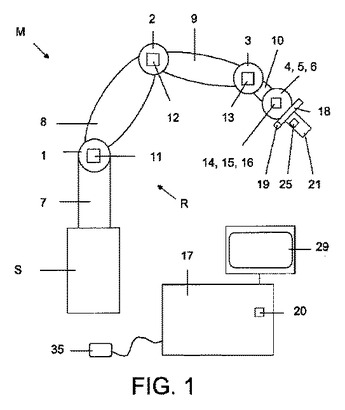 (もっと読む)
(もっと読む)
産業用ロボットの出力トルク制限回路

【課題】産業用ロボットにおいて、力センサにて検出されたトルク信号により各関節軸の出力トルクを制限しながらの運転を可能とするとともに、駆動部の効率に左右されない正確な出力トルク制限の解決法を提供する。
【解決手段】各関節軸の姿勢保持トルクを算出する保持トルク演算回路1と、各関節軸の駆動部に取り付けられた力センサ4にて検出されたトルク信号から保持トルク演算回路1にて算出された姿勢保持トルクを減算することにより各関節軸の出力トルクを算出する減算回路5と、この減算回路5にて算出された各関節軸の出力トルクがトルク規制値を超える場合に制御トルクを出力するようにされたヒステリシス回路2と、このヒステリシス回路2から出力された制御トルクに基づいて機械インピーダンス演算により軌道オフセットを算出する仮想機械インピーダンス回路3と、を有するようにした。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ロボットが環境に接触しても発振現象を生じることがなく、安定した接触状態を維持できるパワーアシスト装置およびその制御方法を提供する。
【解決手段】制御装置6によって、ロボットアーム2が環境と非接触の場合、ロボットアーム2に提示する仮想の非接触時摩擦力FLを設定し、非接触時摩擦力FLが操作ハンドル4に作用するようにアクチュエータ5を制御し、あるいは、ロボットアーム2が環境と接触し、操作力fmと外力feの向きが一致する場合には、ロボットアーム2に提示する仮想の非接触時摩擦力FLを設定し、非接触時摩擦力FLが操作ハンドル4に作用するようにアクチュエータ5を制御し、あるいは、ロボットアーム2が環境と接触し、操作力fmと外力feの向きが一致しない場合には、ロボットアーム2に提示する仮想の接触時摩擦力FHを設定し、接触時摩擦力FHが操作ハンドル4に作用するようにアクチュエータ5を制御する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】ワークを目標に合わせる場合は、ブレを補正して目標軌道に沿いやすくするとともに、軌道の変更・修正を行う場合は、ワークをスムーズに移動できるように制御するパワーアシスト装置およびその制御方法を提供する。
【解決手段】操作ハンドル6と、操作ハンドル6に加えられた操作力とその向きθhを検出する力センサ7と、ロボットアーム3と、アクチュエータ11と、を備えるパワーアシスト装置50の制御方法であって、操作力の向きθhが、予め定めた操作ハンドル6の進行方向に対して所定の角度範囲内であると検出された場合には、操作ハンドル6を、操作力の進行方向成分のみを採用して、進行方向Aに沿って進行させるようにアクチュエータ11を駆動し、操作力の向きθhが、前記所定の角度範囲外であると検出された場合には、操作ハンドル6を、操作ハンドル6に加えられた操作力とその向きで進行させるようにアクチュエータ11を駆動する。
(もっと読む)
ロボットシステム
【課題】セル生産方式の製品生産に適用可能なロボットシステムを提供する。
【解決手段】物を掴むための手ユニット123cを有するロボット120と、ロボット120の操作者11の動作を検出する検出部110と、ロボット120の動作を制御するロボット制御部130とを備え、検出部110は、操作者11の手に取り付けられ、該操作者11の手にかかる圧力を検出する第1圧力検出部111を有し、ロボット制御部130は、第1圧力検出部111により検出される圧力と同じ圧力が手ユニット123cにかかる状態で、ロボット120が検出部110により検出された動作と同じ動作を行うよう手ユニット123cの動作を制御する動作指令生成部131を有する。
(もっと読む)
ロボット、及びロボットの制御方法
【課題】自然な動作が可能となるロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様にかかるロボット100は、胴体部6と、胴体部を所定の軸周りに回転させる車輪2のモータ131bと、胴体部6に取り付けられた頭部1と、頭部1を所定の軸と平行な軸回りに対して回転させる首関節7と、アクチュータ、及び関節を制御する制御部101と、頭部1に対して所定の軸回りにかかる力を検出するためトルクセンサ125aと、を備えている。制御部101が、トルクセンサ125aからの出力値としきい値とを比較して、トルクセンサ125からの出力値がしきい値を越えていた場合に、出力値が低減するように、車輪2のモータ131bを制御する。
(もっと読む)
受動的力覚フィードバック装置および受動的力覚フィードバックシステム
【目的】人間に対し,体の一部に力を加えることで,受動的な力覚フィードバックを実現する装置,およびその応用システムを提供することを目的とする.
【構成】本発明による受動的力覚フィードバック装置は,上腕や前腕など人間の体に装着され,本体にアクチュエータやセンサを装備し,体の一部に対し受動的な力覚の提示を実現する.また,受動的力覚フィードバック装置を用いて,遠隔操作システムや力覚訓練システムを実現する.
(もっと読む)
構造体及びマニピュレータ及び構造体制御システム
【課題】安全な構造体、及び安全性を高めたマニピュレータ及び制御システムを実現する。
【解決手段】構造体3は、基端側の第1部材31と、先端側の第3部材35と、その間に配置される第2部材32〜34と、第1部材31と第2部材32〜34とが互いに押圧し合う第1結合力と、第2部材32〜34と第3部材35とが互いに押圧し合う第2の大きさの結合力とを発生させる線材と、を備える。この構造体3は、第1結合力により第1部材31と第2部材32〜34との間に生じた結合力よりも大きな外力が付与されると、第1部材31と第3部材35との間に相対変位を生じさせ、第2結合力により第2部材32〜34と第1部材31との間に生じた結合力よりも大きな外力が付与されると、第2部材32〜34と第3部材35との間に相対変位を生じさせる。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】物体に衝突する際に位置制御と力制御の切り替えを円滑に行なう。
【解決手段】把持する物体の位置情報や形状情報が正確でないと、把持の失敗、把持対象物の転倒や破壊などの可能性がある。ロボット装置は、加速度制御をベースとして位置制御を行ない、指先や手先が物体に接触したときには、位置指令値を満足することよりも、大きな衝撃力を加えないことを優先する。また、指先や手先が物体などの外界と接触した直後から接触力を正確に加えることができ、把持や操作の計画が立て易い。位置制御中に物体と衝突しても所定値を超える接触力は発生せず、衝突した直後から与えられた接触力を追従する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】作業者の操作に対する応答性に優れ、対象物の移動や取り付け作業の効率を向上させたパワーアシスト装置及びその制御方法を提供することを目的とする。
【解決手段】作業者の操作に協動して対象物2を移動可能なパワーアシスト装置1であって、対象物2を把持するハンド部10と、ハンド部10を上下方向に駆動させる上下駆動部11と、上下駆動部11に対してハンド部10を任意の三次元方向に揺動自在に連結させるフリージョイント部12と、ハンド部10に対して所定の方向に粘性抵抗を付与するシリンダ装置13・14と、ハンド部10を操作する作業者の操作力を検出する力センサ15と、力センサ15により検出された操作力から上下駆動部11に対するインピーダンス制御指令値を算出し、インピーダンス制御指令値に基づいて上下駆動部11を駆動させる制御部16とを具備してなる。
(もっと読む)
安全装置およびそれを備えたマニピュレータ
【課題】マニピュレータの安全装置に関し、マニピュレータと所定の対象物との接触を効果的に抑制すると共に稼働率の低下を抑制する。
【解決手段】パワーアシストアームの安全装置20は、パワーアシストアームと所定の対象物50との接触を抑制するためのものである。所定の対象物50とパワーアシストアームとの距離を測定する距離測定手段22と、距離測定手段22によって測定された所定の対象物50とパワーアシストアームとの距離が所定の距離以下であるとき、パワーアシストアームが所定の対象物50を回避する様に、パワーアシストアームに反発力を発生させる反発力発生手段21と、を備えている。
(もっと読む)
パワーアシストロボット
【課題】操作者の操作力を増幅して操作者の作業をアシストするパワーアシストロボットの利便性を向上させる。
【解決手段】パワーアシストロボット10は、駆動源11と、操作者によって操作される操作部12と、対象物に力を与える作業部13と、操作部12に入力された操作力を増幅し、増幅した力を駆動源11を介して作業部13に供給する増幅部14と、作業部13が操作部12の操作に追従するように制御を行う制御部16と、作業部13が操作部12の操作に追従しているか否かを表す状態であるパワーアシスト状態を判断するパワーアシスト状態判断部17と、パワーアシスト状態が不安定であるときに操作者等に対して所定の提示を行う状態提示部20と、を備えている。
(もっと読む)
協調ロボットシステム
【課題】本発明は、本発明の目的は、高速協調ハンドリングしてきた嵌合ワークを滑らかに高速に挿入するための協調ロボットシステムを提供するものである。
【解決手段】少なくとも2台のロボット1、2とからなり、力制御されるように力制御手段14、15を備えたロボット制御手段9により作業を行うための協調ロボットシステムにおいて、少なくとも2台の前記ロボットの力センサ3、4の信号が、各々の前記ロボットを制御する動作制御手段12、13に取り込まれたものである。
(もっと読む)
嵌合装置
【課題】コンプライアンス制御を用いた嵌合装置において、従来よりも高速で安定した嵌合を行うこと可能にする。
【解決手段】嵌合装置10は、ワークを把持するハンドを先端に備えたロボットアーム12と、ハンドに把持されたワークが受ける力及びモーメントを検出するための力検出器14と、ロボットアーム12の動作を制御するための制御装置16とを備える。制御装置16は、ワークを嵌合させるように動作指令を作成する動作指令作成部30と、ワークの接触中に力検出器14によって検出される力及びモーメントの最大値又はワークが初めて接触したときに力検出器14によって検出された力及びモーメントの何れかに基づき、検出される力及びモーメントが閾値以下になるまで、嵌合方向に対して垂直な方向に関するハンドの位置と嵌合方向に対して垂直な軸線周りのハンドの姿勢とを修正するように動作指令を補正する動作指令補正部32とを備える。
(もっと読む)
ロボットアームの制御装置及び制御方法、ロボット、及びロボットアームの制御プログラム
【課題】多関節型のロボットアームであっても安全に人と接触することができ、さらに、人の動きに応じた最適な接触動作が可能で、人へ接触のダメージを与えることなく人と共存できる安全なロボットアームの動作制御を実現できるロボットアームの制御装置などを提供する。
【解決手段】ロボットアームの制御装置であって、人接近検知手段3が人の接近を検知した時に、人運動検出手段2の検出した人の運動に基づいてロボットアーム8の各関節部ごとに個別にインピーダンスを設定することで人とロボットアーム8の衝突に対応する衝突対応動作制御手段で制御する。
(もっと読む)
リハビリテーション教育用ロボット
【課題】二関節アーム装置の先端部において六方向の力を発生させるようにアクチュエータの駆動を制御することによって、人間の上肢又は下肢の筋出力と上肢又は下肢の先端の出力方向との関係を再現することができ、リハビリテーション施術訓練者が人間の上肢又は下肢の各筋の出力と上肢又は下肢の先端の出力方向との関係を体験的に学習することができるようにする。
【解決手段】所定の駆動シーケンスに従って第1〜第6アクチュエータを動作させ、第1リンクの先端部において六方向の力を発生させ、第1リンクの先端部において発生される力の方向が選択された方向となるように選択されたアクチュエータを動作させ、第1リンクの先端部を保持するリハビリテーション施術訓練者に第1リンクの先端部において発生される力の方向を体験させる。
(もっと読む)
ロボットの制御方法、ロボット制御装置およびロボット制御システム
【課題】嵌合作業時の噛付きをより確実に短い時間で解消する。
【解決手段】嵌合部品を把持する把持手段1204と、前記把持手段によってされた嵌合部品に加わる力およびモーメントを検出する力モーメント検出手段1207と、を備え、前記嵌合部品を被嵌合部品に嵌合させるロボットにおいて、嵌合途中でかじり付き状態であると判断する間は、挿入動作を継続するとともに、大きさと方向が周期的に変化する振動力を、前記把持手段を介して前記嵌合部品に付加する。
(もっと読む)
歩行状態の評価方法及び歩行制御方法
【課題】歩行ロボットの足つきを正確に検知することのできる歩行状態の評価方法を提供し、さらに、安定した歩行動作を実現できる歩行制御方法を提供すること。
【解決手段】本発明にかかる歩行状態の評価方法では、二脚歩行式ロボット1の歩行状態を評価する。まず、歩行動作中の足裏の接地点分布を床反力分布計2,3により計測する。次に、計測された接地点分布に基づいて接地点分散値を算出する。さらに、算出された接地点分散値に基づいて歩行状態を評価する。また、床反力中心と、複数の計測点で計測された床反力に基づいて最大旋回力を算出して、これに基づき歩行状態を評価してもよい。
(もっと読む)
動作支援装置およびその制御方法
【課題】安全性が高く、かつ人間的なスムーズな動きを再現して上肢の動作を好適に支援すると共に、多様な場面で使用者の利便に供し、高いリハビリ効果の期待できる動作支援装置およびその制御方法を提供する。
【解決手段】使用者の上肢の動作を検出する第1検出手段30と、上肢の位置および姿勢を検出する第2検出手段14a、16a、18a、20aとを有し、これら各手段からの情報によって制御下に作動するマニピュレータ12を備え、このマニピュレータ12の先端は使用者の上肢が離間自在であり、該マニピュレータ12を第1検出手段30および第2検出手段14a、16a、18a、20aからの情報でフィードバック制御することで、上肢の動作を好適に支援する。
(もっと読む)
41 - 60 / 125
[ Back to top ]