
Fターム[3C007LU07]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 力制御 (227) | トルクの制御 (59)
Fターム[3C007LU07]に分類される特許
1 - 20 / 59
ロボットハンドの制御装置
【課題】簡易な構成で硬さの異なる被接触体に対応することができるロボットハンドの制御装置を提供する。
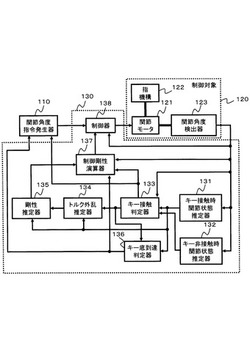
【解決手段】本発明の一形態に係るロボットハンドの制御装置は、指が被接触体に接触した時における関節の状態を推定する接触時関節状態推定器131と、指が被接触体に接触していない時における関節の状態を推定する非接触時関節状態推定器132と、指が被接触体に接触したか否かを判定する接触判定器133と、関節に印加されるトルク外乱を推定するトルク外乱推定器134と、被接触体の剛性を推定する剛性推定器135と、接触判定結果が接触状態の場合、関節の制御剛性を、指が被接触体の押し込み状態を維持できる最小値に演算する制御剛性演算器137と、関節モータ121を制御する制御器138と、を備える。
(もっと読む)
歩行支援装置、及び歩行支援プログラム

【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
ロボットアームの制御装置、制御方法、及び制御用プログラム
【課題】高価なセンサ等を用いることなく物体が挟まれた位置を正確に検出し、挟み位置に応じてトルクを最適に制御できるようにする。
【解決手段】関節角度の検出値θが目標値θrに追従するように生成される基本トルクT0に安全モータトルクプロフィールPsによる制限を適用することにより安全モータトルクTsを演算する。θに対するTsの変化に基づいてリンク機構21への物体の挟み込みを検出する。物体の挟み込みが検出された場合に関節部から物体までの挟み位置xを推定する。挟み位置xに応じてPsを設定する。
(もっと読む)
ロボットシステム及びロボット制御装置
【課題】ロボットアームと周囲の対象物との接触等で生じる外力を低減することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】ロボットアーム2と、ロボットアーム2に設けられロボットアーム2を駆動させる1以上のアクチュエータ41A〜47Aと、ロボットアーム2とアクチュエータ41A〜47Aとの少なくともいずれかにかかる外力を検出するセンサ部4と、アクチュエータ41A〜47Aの動作を制御するとともに、センサ部4の検出結果に基づいてアクチュエータ41A〜47Aへのトルク指令値を制限するコントローラ3と、を有して構成する。
(もっと読む)
産業機器の回転関節制御装置
【課題】減速機を使用して回転負荷にトルクを供給するトルク制御において、駆動状態あるいは制動状態といったトルクの供給状態を検知する。
【解決手段】本発明は、回転負荷83に対して回転動力を供給する回転関節装置が発生させるトルクを制御する回転関節制御装置71を提供する。回転関節装置は、駆動トルクを発生する駆動トルク発生部51と、所定の回転比で変速された回転数の回転動力を所定の効率で出力する出力軸を有する変速装置30と、出力側トルクを伝達するトルク伝達構造とを有する。回転関節制御装置71は、変速装置30が出力軸に回転動力を出力している伝達状態である駆動状態と、変速装置30が入力軸に回転動力を出力している伝達状態である制動状態とを判定する伝達状態判定部71aを備える。伝達状態判定部71は、駆動トルクと回転比の積である無損失トルクと、出力側トルクとの比較に基づいて駆動状態と制動状態と判別する。
(もっと読む)
着座動作支援装置
【課題】イスの座面高さが不明であっても適切に着座動作を支援することのできる着座動作支援装置を提供する。
【解決手段】支援装置は、大腿リンク、下腿リンク、ジョイント、モータ、及び、コントローラを備える。大腿リンクと下腿リンクは、ユーザの大腿と下腿にそれぞれ装着される。ジョイントは、大腿リンクに下腿リンクを揺動可能に連結する。モータは、ジョイントを駆動し、大腿リンクに対して下腿リンクを揺動させるトルクを発生する。コントローラは、膝角度が目標膝角度に一致するようにモータを制御する。コントローラは、さらに、目標膝角度が経時的に小さくなる目標膝角度パターンに実際の膝角度が追従するようにモータを制御するとともに、目標膝角度パターンへの追従制御中に所定の着座判定条件が成立したときに追従制御を終了する。
(もっと読む)
ロボット装置
【課題】可動部の静止保持状態を維持したまま即座にモータの出力値を低減させることができるロボット装置を提供する。
【解決手段】ロボット装置1は、モータによってアーム部6を関節部5を介して可動させるロボット本体2と、モータの出力値を制御するECU4と、を備えている。ECU4は、アーム部6が静止保持状態のとき、発生している関節出力指標値に基づいてモータの出力値を制御する。よって、ロボット装置1では、静止保持状態でモータの出力値を低減する際に、アーム部6が動き出すまで少しずつ該出力値を低減させる必要がなくなる。
(もっと読む)
ロボット装置
【課題】把持対象物の把持状態を維持することが可能な把持形態を選択することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられた多指ハンド部20と、視覚センサ30による検出により、把持対象物110の位置情報および形状情報を取得する画像処理部43と、把持対象物110の位置情報および形状情報に基づいて多指ハンド部20による把持形態の候補を複数抽出するとともに、抽出された複数の把持形態の候補についての多指ハンド部20の関節トルクに基づいて、抽出された複数の把持形態の候補の中から1つの把持形態を選択する制御装置40とを備える。
(もっと読む)
ロボットアーム位置補正パラメータの同定装置及び方法、並びにそれを用いたロボットコントローラ及びロボット制御方法
【課題】ロボット個体毎に適用可能な、自動処理による簡便なロボット位置補正パラメータ同定方法及び装置を提供する。
【解決手段】本発明は、各関節部のモータと、モータに連結された減速機と、減速機に連結されるロボットアームとを備えるロボットにおいて、手先位置の軌跡誤差を補正するために、各モータへの角度指令に加算される補正値のパラメータを同定する装置であり、該モータへのトルク指令が最大となるリンク角度において最大値をとるトルク指令と同一周期の正弦波の位相に基づいて補正値の位相パラメータを同定し、且つ、同定された位相パラメータ及び任意の振幅パラメータを用いて計算される補正値と角度指令との合計に対する順運動学計算から得られるロボットの手先位置と現在の手先位置との差分につき動作時間内での積分値を計算し、該積分値が最小となる振幅パラメータを補正値の振幅パラメータとして同定する手段を備える。
(もっと読む)
歩行支援装置
【課題】ユーザに違和感を与えることなく歩行動作を歩行支援装置を提供する。
【解決手段】歩行支援装置100は、ユーザの下肢に装着される下肢リンク12、足に装着される足リンク20を備える。足リンク20はジョイント14によって下肢リンク12に揺動可能に連結されている。足リンク20は、モータ16によって揺動する。モータ16はコントローラ10によって制御される。足リンク20には、足が接地しているか否かを検知する接地センサ22が備えられている。コントローラ10は、接地センサ22の出力に基づいて脚が遊脚期間にあるか立脚期間にあるかを判定する。そして、コントローラ10は、立脚期間には出力トルクが目標トルクに一致するようにモータ16をトルク制御する。他方コントローラ10は、遊脚期間には足リンク20の揺動角度が目標角度に一致するようにモータ16を角度制御する。
(もっと読む)
ロボットの制御装置及び方法
【課題】ロボットの柔軟制御中にロボットに対して急激に大きな外力が働いた場合に、ロボット各軸の位置の急激な変化に適切に対応し得る可動域制限を行うことができる制御装置及び制御方法を提供する。
【解決手段】本制御装置及び制御方法は、少なくとも1つの関節を有するロボットにおいて、各関節につき、関節位置指令に対して、位置フィードバック制御及び速度フィードバック制御を行い、該関節に設定された関節座標系において、所定の制限開始位置と該関節の現在位置との関係及び所定の制限開始速度と該関節の現在速度との関係に基づいて制限トルクを計算し、計算された制限トルクを速度フィードバック制御の出力に加算して得られるトルクにより該関節の動作を制御する。
(もっと読む)
ロボットのティーチング装置及びティーチング方法
【課題】ロボットを操作するための専門知識を有していなくても作業ノウハウを正確に教示すること。
【解決手段】作業者の手に装着されるモーションキャプチャ2と、モーションキャプチャから送信される3次元座標データに基づき産業用ロボット4を制御する制御部31とを備え、制御部31は、予め定められたサンプリング間隔でモーションキャプチャの位置をサンプリングし、移動距離算出機能31aと、移動速度算出機能31b、および、産業用ロボットの保持部が、ロボットの動作基点設定機能31cで設定された動作基点から移動速度算出機能31bで算出された移動速度で、サンプリングされたすべてのサンプリング点に沿って移動するように、当該産業用ロボットをティーチングする産業用ロボット制御機能31dとを有する。
(もっと読む)
歩行補助装置
【課題】 膝関節と足首関節を補助する動作と、膝関節の補助をなくし、足首関節を補助する動作とを実行することができる歩行補助装置を提供する。
【解決手段】 ユーザの上腿から下腿にかけて装着できるように構成されており、膝関節にトルクを加えるアクチュエータ38を有する膝装具30と、ユーザの下腿から足にかけて装着できるように構成されており、足首関節にトルクを加えるアクチュエータ58を有する短下肢装具50を備えており、膝装具30が短下肢装具50から分離されていることを特徴とする歩行補助装置10。
(もっと読む)
直列弾性アクチュエータの力およびインピーダンスのロバスト制御のための構成
【課題】力誤差を計算することなく、または、直接的に弾性SEA素子をひずみゲージで測定することなく、SEAにより付与されるトルクを制御するためのSEA構成に関する。
【解決手段】SEA構成30は、弾性バネ36の一端部に連結されるモーター32と、弾性バネの反対側の端部に連結される負荷38とを有する。モーターはバネを通じて負荷を駆動する。モーターのシャフトおよび負荷の向きは、位置センサにより測定される。位置センサからの位置信号は、埋め込みプロセッサ44に送られ、モーターシャフトに対する負荷の向きを決定し、バネ上のトルクを決定する。埋め込みプロセッサは、リモートコントローラ46から参照トルク信号を受け取る。埋め込みプロセッサは、所望のジョイントトルクについて高速サーボループを動作させる。リモートコントローラは、インピーダンスまたは位置決め目標物により高次の目標物に基づいてジョイントトルクを決定する。
(もっと読む)
人間型ロボット及びその歩行制御方法
【課題】 関節トルクのサーボ制御に基づいて安定的な歩行を具現する人間型ロボット及びその歩行制御方法を開示する。
【解決手段】 人間型ロボットは、センサの測定値で関節位置軌跡補正値と関節トルク補正値をそれぞれ計算し、計算された各補正値を用いて関節位置軌跡と関節トルクを補正し、補正された関節トルクによって関節に設置されたモータを駆動することができる。
(もっと読む)
ロボット関節のための統合高速トルク制御システム
【課題】ロボットの関節の制御システムであって、高速トルクを達成し、かつノイズに強い制御システムを提供する。
【解決手段】並置関節プロセッサ及び高速通信バスを有する印刷回路基板アセンブリ(PCBA)30を含んでいる。PCBAは、また、パワーインバータモジュール(PIM)34と、1つ以上のモータ位置センサからのセンサデータを処理するためのセンサ調整電子素子(SCE)36とを含んでいる。関節のモータのトルク制御は、高速トルクループとしてPCBAにより提供される。各関節プロセッサは、制御されるべきロボット関節内に組み込まれるか、又はそれに並置されている。関節プロセッサ、PIM、及び高速バスの並置により、制御システムの雑音イミュニティが増し、関節モータ40からのセンサデータの関節レベルの局所的処理により、各制御ノードに対する往復のバスケーブルを最短にすることができる。
(もっと読む)
省エネルギー型ロボット関節駆動制御システム
【課題】本発明は、ロボットの準受動制御において、能動期と受動期の切り替えを遅延なく確実に実現することのできるロボット関節駆動制御システムを提供することを目的とする。
【解決手段】準受動制御の受動期において、出力軸にかかる回転アクチュエータの減速機に起因する摩擦トルクを相殺するような回転トルクを、駆動モータによって付与する。この際、駆動モータの回転トルクは、ロボット関節の出力軸に設けられたトルクセンサの測定値を入力としてフィードバック制御により導出する。その結果、出力側リンクは、減速機の存在にもかかわらず、あたかも自由関節に接続されているかのように挙動し、エネルギー効率の高いロボット関節駆動制御システムを実現する。
(もっと読む)
ロボット装置
【課題】 低コストで信頼性が高く正確なロボット関節部におけるたわみ補正、力制御等ができるロボット装置を提供すること。
【解決手段】 基台側リンク1に備えた駆動モータ11を駆動制御する制御装置と、この駆動モータの動力を入力軸52、固定軸53、出力軸54の3要素を有する減速機5を介して先端側リンク2に伝達する関節部3を備え、この関節部3は、前記基台側リンク1に筐体が固定され、検出部で前記減速機5の入力軸52の角度情報を検出する第一エンコーダ12と、前記先端側リンク2に筐体21が固定され、検出部22で前記減速機5の入力軸52の角度情報を検出する第二エンコーダ23とを備え、前記制御装置は、前記第二エンコーダ23で検出した前記入力軸52の角度情報に基いて前記駆動モータ11を駆動制御するよう構成されている。
(もっと読む)
ロボット、電流制限装置及び電流制限方法
【課題】増速動作時において可動体に作用する外力から伝達機構を保護しつつ、モータにより可動体を増速する際に可動体に作用させ得る最大トルクが低下しない電流制限装置を提供する。
【解決手段】第1軸モータ21は、第1の減速機27を介して第1軸部4に接続され、正負の電流を夫々流すと電流に応じた正方向及び逆方向のトルクを第1軸部に与える。第1軸モータ21に流す電流は、位置/速度制御部40によって第1軸部の速度が速度指令値になるよう制御されている。更に、第1軸モータ21に流す電流は、第1軸用電流制限部41によって電流制限範囲内に制限される。電流制限範囲は、第1軸用電流制限部41によって上限値及び下限値が可変し、第1軸部が正方向に回動する際、下限値の絶対値を上限値の絶対値より小さくなるように下限値及び上限値を設定する。
(もっと読む)
走行式作業ロボット
【課題】災害発生時における作業を高い信頼性をもって実行すること。
【解決手段】この走行式作業ロボットは、不整地に対して追従可能なクローラ1を備え、このクローラ1によって不整地上を走行することが可能な走行台車2と、この走行台車2上に配置された多軸構成の胴体部3と、この胴体部に備えられた多関節アーム4と、胴体部3に備えられた多関節撮影手段5とを備えている。また、走行式作業ロボットは、走行台車2の下部に複数のクローラ1をそれぞれ、各クローラ1の長さ方向中央部を支点として回転揺動可能な状態で備え、備えられた各クローラ1をそれぞれ独立に駆動させるクローラ駆動手段(クローラモータ)を付加した。
(もっと読む)
1 - 20 / 59
[ Back to top ]