
Fターム[3C007WA11]の内容
マニピュレータ、ロボット (46,145) | 自走、自律型のタイプ (2,408) | 移動形式 (1,340)
Fターム[3C007WA11]の下位に属するFターム
脚式 (684)
車輪式 (562)
クローラ (40)
胴体を使つて移動(例;尺取り虫型) (22)
吸着部材を有するもの (14)
軌道 (1)
Fターム[3C007WA11]に分類される特許
1 - 17 / 17
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
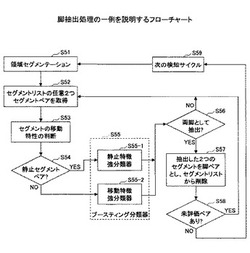
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
画像処理装置及び移動体位置推定方法

【課題】周囲の状況に関わらず自己の位置の推定精度を向上させる。
【解決手段】予め周囲地図記憶部11に記憶された移動体の周囲の特徴情報22と当該特徴情報22の位置情報21とを取得し、地図内面構造設定部12が複数の特徴情報22を含む領域の面構造を設定し、地図内特徴点可視性判断部13が、面構造によって、移動体の位置から特徴情報22が撮像不能である場合に、当該特徴情報を可視性がないと判定し、自己位置推定部15が、移動体の周囲の特徴情報22のうち可視性がないと判定された特徴情報22を除いて、取得された特徴情報22及び位置情報21と自己の位置から撮像した撮像画像内の実特徴とに基づいて、移動体の位置を推定する。
(もっと読む)
水室内作業装置および水室内作業方法
【課題】蒸気発生器における水室内作業の作業性を向上できる水室内作業装置および水室内作業方法を提供すること。
【解決手段】この水室内作業装置1は、管板面137aにある伝熱管132を保持して管板面137aに固定されるベース2と、このベース2に連結されると共に水室130内に吊り下げられて配置されるマニピュレータ4とを備える。そして、ベース2が、マニピュレータ4に連結されるベース本体21と、このベース本体21に対して進退変位できるウイング22a、22bと、このウイング22に配置されると共に伝熱管132に挿入されて伝熱管132をクランプ保持するクランパ23a、23bとを有する。
(もっと読む)
センサ固定具
【課題】ロボット等に使用される複数個のセンサからなるセンサ装置において、複数個のセンサで形成される指向領域がつながるようにセンサを配置すること可能とするセンサ固定具を提供することを課題とする。
【解決手段】本発明のセンサ固定具は、複数のセンサを固定可能なセンサ固定具であって、複数のセンサをその上下から挟み固定する為の挟持部材と、センサと挟持部材とを固定する為の連結部材とを備え、挟持部材は挟持部を有し、該挟持部材の挟持部が、センサの被挟持部と対応な形状となっていることを特徴とする。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
ロボット装置におけるスキーマの学習と使用
【課題】環境との相互作用時の挙動に優れた自律移動ロボット制御方式を提供する。
【解決手段】スキーマを使用し、該スキーマは、ロボットが設定されたゴールを達成するようにするための、パラメータで表した運動指令の系列の集合であって、該系列のためのパラメータは、該ロボットコントローラの状態変数から得られ、該ロボットコントローラへ知覚入力を供給するためのインタフェースと、スキーマ認識モジュールからの入力、または逆方向モデルモジュールからの入力、またはそれらの組み合わせを供給されるスキーマ状態メモリと、状態変数及び格納されたスキーマに基づいて、運動指令を生成する逆方向モデルと、状態変数及び格納されたスキーマに基づいて、状態変数を予測する順方向モデルと、該ロボットコントローラによって制御された該ロボットの、供給された状態変数に基づいてスキーマを選択するスキーマ認識モジュールと、を備えた。
(もっと読む)
ロボット停止装置及び方法
【課題】非常停止の必要性を的確に検出し、ロボットの誤停止を防止する。
【解決手段】自律的に動作するロボットを停止させるロボット停止装置1であって、音声情報を検出する音声検出手段2と、物理的操作を受け付ける操作手段3と、音声検出手段2から出力される音声検出信号15が所定の音声的条件18を満たし、且つ操作手段3から出力される操作検出信号16が所定の操作的条件19を満たす場合に、停止信号17を出力する制御手段4と、停止信号17が出力された場合に、ロボットの動作を停止させる停止手段5とを備える
(もっと読む)
施設を整備するロボットと実時間または近実時間で相互作用する方法
本発明の態様によれば、整備ロボットとそのようなロボットを制御するための方法が提供される。詳細には、ロボットは、人の存在を検出し、人の存在の検出に応じて次の行動を取るように構成される。例えば、ロボットは、領域から出るか、人からの命令を待つか、人が出るまで遊休またはスリープ状態またはモードになる。 (もっと読む)
迎角が二種類あるプロペラ
【課題】 二足歩行ロボットの移動しながらバランスをとる技術
【解決手段】 二足歩行ロボットをわずかに浮上させることで、足の裏にかかる重量をゼロにし重心をぐらつかせず脚部への姿勢制御のための負担を減らし、スムーズに歩行することを可能にする。そのためには空気を押し出すプロペラではなく、飛行機のハネのように気圧の差(揚力)を効率よく利用して飛行できる二種類の迎角のブレードを持つプロペラを組み込む。
(もっと読む)
円筒状部材用自動走行ロボット
【課題】煙突や円柱等の円筒状部材に巻き付ける構造にすることで、バランスを使用しなくても円筒状部材から外れることなく、円筒状部材において自由に昇降させる。
【解決手段】円筒状部材Cに巻き付け装着するリング状本体32と、弾力性を有する複数本の毛状体3を、円筒状部材Cの上下方向の中心線に向け、かつ下方へ傾斜するように配置した推進力発生部33と、毛状体3が撓み、それが復元する際に所定方向への推進力を発生させるように、毛状体3群を振動させる振動部34と、リング状本体32の円周長さを可変させるために、2個の略円弧形状ケース35の接合位置がずれるように、その接合位置に取り付けた、ラッチ機構から成る係合具36とを備えた。
(もっと読む)
地図情報処理装置及び移動ロボット装置
【課題】移動ロボットが移動可能領域を算出するための計算コストを軽減させる。
【解決手段】移動体が移動した移動軌跡を取得する移動軌跡取得部と、移動体が移動する床面に上方から投影されたサイズを示す移動体サイズを特定するために前記移動体の大きさに関する情報を取得するサイズ取得部と、移動軌跡と移動体サイズとにより障害物が無いと判断された領域のうち、移動ロボットが移動する床面に上方から投影されたサイズ以上の広い領域を、移動ロボットが移動可能な領域として特定する領域特定部と、を備える。
(もっと読む)
障害物を迂回可能な自律移動ロボット及びその方法
障害物を迂回することが可能な自律移動ロボット及びその方法が提供される。前記自律移動ロボットは、移動体と、前記移動体に連結され前記移動体の引っ張る力に比例して伸びる伸長ユニットと、前記伸長ユニットに連結された前記物体の前記引っ張る力に対応して前記移動体に向かって前記自律移動ロボットを移動させる駆動ユニットと、前記移動体の前記引っ張る力に対応して前記伸長ユニットが伸びる伸長長さによるルート情報を獲得するルート情報獲得ユニットと、前記移動体に先導されている前記自律移動ロボットの進行方向の所定距離内に位置する障害物の存在を検出する障害物検出ユニットと、前記ルート情報に基づいたルートに沿って前記自律移動ロボットが移動するように前記駆動ユニットを制御する制御ユニットとを含む。これにより、障害物と自律移動ロボットとの衝突を防ぐことができ、自律移動ロボットは自然に障害物を迂回することができる。  (もっと読む)
(もっと読む)
ロボットシステム
【課題】ロボットが高い精度で自己位置を認識し、デッドレコニングの累積誤差を補正することができるロボットシステムを提供する。
【解決手段】ロボット1と環境装置24とを含み、ロボット1は、通信部4を介した環境装置24からの動作指令に従って移動部21により動作環境を移動し所定の動作を行うロボットシステムであって、通信部2、4は、光信号の点滅により情報を授受する光通信手段を備え、ロボット1は、画像認識部を備え、画像認識部にて光信号の点灯位置を認識することにより動作環境における自己の位置を補正する。
(もっと読む)
壁面間移動装置
【課題】壁面間で保持されながら落下せずに移動することができる壁面間移動装置を提供する。
【解決手段】本発明の壁面間移動装置は、滑走子11が固定された滑走子体1と、滑走子体1を振幅させる駆動手段2と、滑走子体1及び駆動手段2を支持する移動体本体3と、移動体本体3を壁面と略平行に維持するとともに落下を防止するためのガイド手段4を備えている。かかる構成によれば、駆動手段2により滑走子体1を加振させて滑走子11を壁面に押圧することによって移動体本体3の推進力を得ることができる。
(もっと読む)
自動走行ロボット
【課題】 管路の内壁面の形状、管路の傾斜角度に影響されずに、安定した円滑な走行が得られる自動走行ロボットを提供する。
【解決手段】 対向配置される少なくとも一対の脚部2、2と、各脚部2の外面2aに外方を向くように、かつ外面2aに対して所定の角度で傾斜するように配置される複数の毛状体5と、少なくとも一対の脚部2、2間に設けられて、脚部2、2を互いに接近、離隔する方向に駆動させる駆動手段6と、少なくとも一対の脚部2、2間に設けられて、各脚部2に振動を付加する加振手段20とを備える。駆動手段6は、少なくとも一対の脚部2、2間を連結する伸縮自在な連結機構7と、連結機構7を伸縮させるスライダ機構11と、スライダ機構11を駆動させる駆動機構14とを備える。
(もっと読む)
付着された連結手段の動き程度を測定する装置
付着された連結手段の引っ張られた程度、方向及び長さを測定できる装置を開示する。一端は装置の内部に連結されており、他端は前記装置の一側面を介して外部に位置する連結手段、連結手段の他端が装置外部に引っ張り出されるときに発生する微小変化を感知して連結手段に加えられた張力を検出する張力検出部、張力により連結手段が、張力方向に実質的に直交する平面空間で、上下あるいは左右に移動する程度を感知して、連結手段が引っ張られる方向を測定する方向検出部、及び張力により引っ張られた連結手段の装置外部への引出し長さを測定する長さ検出部を備え、ケーブルなどの連結手段が引っ張られた場合に、そのケーブルに連結された装置が、引っ張られた状態についての情報を検出する。したがって、該発明の装置が付着されたロボット子犬と、本発明のケーブルを手に取って散歩を行った場合に、そのケーブルの保持状態についての情報を提供し、ユーザの意向についてロボット子犬に知らせ、その結果、ロボット子犬が、ユーザの意向にしたがってユーザについてくるようになる。これにより、本装置がユーザの意向にいての情報をこの装置に提供するので、ロボット子犬などの自動的に移動できる装置は、本装置の使用によって、より便利に使用することができる。 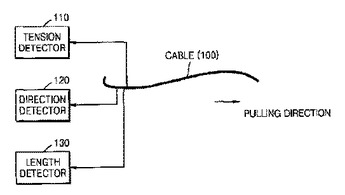 (もっと読む)
(もっと読む)
2足歩行ロボット
【課題】 浮上または浮遊が可能で、関節を構成するアクチュエータに作用する負荷を簡易な構成で軽減させることで軽量化を実現した2足歩行ロボットを提供すること。
【解決手段】 2足歩行ロボット1を構成する胴体2の左右の肩関節3,3には上腕部4,4が装着され、上腕部4,4と胴体2の背面には3基のダクテッドファン7,7が装着されている。このダクテッドファン7は、肩関節を構成するアクチュエータ31,32の回転や回動によって適宜の方向に傾斜可能となっている。股関節5,5には左右の脚部6,6が装着されている。この脚部6は、大腿部材61と、膝関節と、下腿部材63、足首関節と足部材66とからなる。各関節を構成するアクチュエータのまわりには、それぞれの関節が屈曲する際に作用する負荷トルクを低減可能な引張ばね81,83,85と補助部材82,84,86とからなる負荷軽減手段が設けられている。
(もっと読む)
1 - 17 / 17
[ Back to top ]