
Fターム[3C030AA08]の内容
Fターム[3C030AA08]の下位に属するFターム
一点を中心に揺動する部材によるもの (14)
門型移動部材によるもの (11)
Fターム[3C030AA08]に分類される特許
41 - 60 / 111
軸状部品の供給装置
【課題】 軸状部品の移動経路を簡素化することができ、空間的に制約された箇所において採用しやすい軸状部品の供給装置を提供する。
【解決手段】 入口開口10と出口開口11が設けられた保持部材8が進退式の供給ロッド6に取り付けられ、保持部材8に入ってきた軸状部品1を一時停止するストッパ手段13が設けられ、軸状部品1を保持部材8の内面に押し付ける保持手段24が設けられ、供給ロッド6の進出後保持部材8から落下して目的箇所に到達した軸状部品1が保持部材8の復帰動作時に保持部材8を相対的に通過できる通過部22が設けられ、この通過部22は供給ロッド6の延長方向の箇所に配置されている。
(もっと読む)
軸状部品の保持装置

【課題】 供給ロッドに保持した軸状部品を目的箇所に到達させるのと同時に、相手方部材との間で強固に挟み付けることができる軸状部品の保持装置を提供する。
【解決手段】 係止部材7が軸状部品1を係止して進出し、保持部材20との間に軸状部品1を挟み付けるものであり、保持部材20の表面24に軸状部品1の一部を受け止める受け部材25が設けられ、係止部材7に進出方向に開放した係止凹部18が設けられているとともに、係止凹部18の幅W1は受け部材25の幅W2よりも大きく設定され、この設定により係止部材7が進出したとき係止凹部18内に受け部材25が相対的に進入して軸状部品1を挟み付けるように構成した。
(もっと読む)
自動組立装置
【課題】比較的簡易な構成によって効率的に部品を組み付けることができる、撮像手段を備えた自動組立装置を提供すること。
【解決手段】自動組立装置は、少なくとも2軸制御される移動ヘッド(1)と、移動ヘッド(1)に取り付けられた部品把持手段(3)と、移動ヘッド(1)に取り付けられた撮像手段(4)とを具備し、撮像手段(4)は、部品供給ステーション(S1)に配置された組立部品(W1)、及び部品把持手段(3)によって把持された組立部品(W1)、及び組立ステーション(S2)に配置された被組立部品(W2)を撮像視野内に収めるように、少なくとも2軸制御の制御軸に対して非平行な光軸(4a)を有する。
(もっと読む)
プロジェクションボルトの溶接方法と溶接装置ならびに保持ヘッド
【課題】 受入孔への押し込み長さや押し込み力を制御しやすくすること、保持ヘッドの構造を合理化することを解決課題とする。
【解決手段】 供給ロッド17に保持されたプロジェクションボルト10を、電極6の受入孔20に挿入し、鋼板部品30にボルト10を電気抵抗溶接で溶接するものにおいて、押出し手段83によりボルト10に対する保持吸引手段35の吸引力が実質的に消滅する位置まで押し出す(押し出し長さS5)とともにこの押し出し位置で押し出しを停止し、この押し出された位置以降は挿入吸引手段38の吸引力によってボルト10を受入孔20内へ吸引する。短い押し出し長さS5により、S5の長さや押し出し力を正確に設定する。
(もっと読む)
チャック及び時計の製造方法
【課題】 様々な表面形状のワークを確実に保持することができ、一台で表面形状の異なる複数のワークに対応することができるチャックを提供すること、及び、チャックの台数を削減してコストダウンを図るとともに、調整時間を短縮して生産性の向上を図ることができる時計の製造方法を提供することを目的としている。
【解決手段】 通気性を有する吸着部4の先端面4aをワークXに当接させるとともに吸着部4の基端側からエア吸引することで、吸着部4の先端面4aにワークXを吸着させ、ワークXを保持するチャック1において、少なくとも吸着部4の先端面4aが、弾性変形可能である。
(もっと読む)
チャック及び時計の製造方法
【課題】 微小なワークを保持することができるとともに、様々な表面形状のワークを確実に保持することができ、一台で表面形状の異なる複数のワークに対応することができるチャックを提供すること、及び、チャックの台数を削減してコストダウンを図るとともに、調整時間を短縮して生産性の向上を図ることができる時計の製造方法を提供することを目的とする。
【解決手段】 ストロー部材4の先端面4aをワークXに当接させるとともにストロー部材4の基端側からエア吸引することで、ストロー部材4の先端面4aにワークXを吸着させ、ワークXを保持するチャック1において、ストロー部材4は、その軸線L方向に沿って平行に配設された軸線L方向に移動可能な複数のパイプ40からなる。
(もっと読む)
部品保持用ヘッドおよび部品検知方法
【課題】 磁石の磁界の範囲内の箇所に磁気的検知機能のセンサーが配置され、これによって部品の存在と不存在を信号にして部品存否を判別することのできる部品保持用ヘッドと検知方法を提供する。
【解決手段】 磁性材料製の部品14を保持の対象とするものであって、ヘッド本体13に部品位置決め用の基準面16,17を有する保持部15が形成され、部品14を前記基準面16,17に吸引する磁石22,23がヘッド本体内部に取付けられ、前記磁石22の磁界の範囲内に磁気的検知機能のセンサー24が配置されている。このようにして部品存在と不存在を示す信号をセンサー24から発信させる。
(もっと読む)
ワーク切出装置
【課題】簡単な装置構成により、厚み方向に突出する突起部を備えた円形ワークを、1枚ずつ分離して排出することができるワーク切出装置を提供すること。
【解決手段】ワーク切出装置1は、厚み方向Tへ突起部72を突出させてなる円形ワーク7を複数枚積み重ねて収容し、1枚ずつ円形ワーク7を分離させるよう構成してある。ワーク切出装置1は、回動手段4によって筒状収容部3の回動速度を変化させて、筒状収容部3内に収容する複数枚の円形ワーク7に、筒状収容部3に対する周方向Cへの相対的な慣性力を付与し、複数枚の円形ワーク7を筒状収容部3に対して周方向Cに位置ずれさせることにより、複数枚の円形ワーク7のうち、最も下側に位置する最下部円形ワーク7の突起部72の周方向Cの位置を切欠部311の周方向Cの位置と一致させて、最下部円形ワーク7を筒状収容部3から落下させるよう構成してある。
(もっと読む)
ニードルローラ整列供給装置及びこれを備えたトリポード部材組立装置
【課題】トリポード部材の脚軸部外周面に複数のニードルローラを効率的に且つ確実に整列供給することができるニードルローラ整列供給装置などを提供する。
【解決手段】ニードルローラ整列供給装置は、第1円筒部材22と、第1円筒部材22内に少なくとも一部分が挿入された状態で配置され、外周面には、ニードルローラ208がそれぞれ収容される複数の溝25aが軸線方向に沿って形成された第2円筒部材24と、第1円筒部材22の先端部よりも脚軸部側に突出するように且つ環状に設けられ、第2円筒部材24の各溝25a内にあるニードルローラ208を溝25a側に押し付けて挟持する挟持機構40と、第1円筒部材22と第2円筒部材24との間に配置される第3円筒部材23と、これら各円筒部材22,23,24を駆動する駆動機構とを備える。
(もっと読む)
中空部品の供給ヘッド
【課題】 供給ヘッドに中空部品を安定性よく保持することができる中空部品の供給ヘッドを提供する。
【解決手段】 供給ロッド14の先端部に取付けたヘッド部材32に中空部品1を保持して目的箇所へ供給するものである。中空部11の一端に開口部12が設けられ他端に閉鎖部8が設けられた中空部品1を供給の対象とし、ヘッド部材32の中央部に中空部品1の中空部11内に合致するガイド部材48が設けられている。
(もっと読む)
軸状部品の供給補助装置
【課題】 軸状部品を受入孔へ正確に吸引し、ソケット部材が軸状部品を保持するときには吸引手段の吸引力を消滅させることができる軸状部品の供給補助装置を提供する。
【解決手段】 保持部材15の受入孔16に挿入された磁性材料製の軸状部品1をロボット装置やねじ締め装置等の保持ヘッド18に保持して目的箇所へ供給する形式のものにおいて、受入孔16の軸線33上またはその近傍に吸引手段32,36が配置され、この吸引手段は切換駆動手段30によって少なくとも軸状部品1の吸引位置と、軸状部品に吸引力を及ぼさない退避位置の2位置をとるように構成されている。
(もっと読む)
軸状部品の供給制御装置
【課題】 供給ロッド全体が移動することによって軸状部品が目的箇所に供給される際に、係止部材に係止された軸状部品が軸線方向に移動することを抑制できる軸状部品の供給制御装置を提供する。
【解決手段】 進退式の供給ロッド5を、その進退方向にほぼ直交する方向に往復させる供給駆動手段19によって支持し、供給ロッド5に軸状部品1の係止部材7が設けられ、供給駆動手段19によって係止部材7を移動させることによって軸状部品1を受入孔16に挿入するものであって、供給ロッド5と一体になって移動するとともに係止されている軸状部品1の軸線方向に進退して軸状部品1の軸線方向の移動を抑制する制止部材28が設けられている。
(もっと読む)
部品運搬用ロボット、及び同ロボットを用いた部品の順立て供給システム
【課題】安価で対象物を正確に認識できる部品運搬ロボット、及び同ロボットを用いた部品の順立て供給システムを提供すること。
【解決手段】部品供給部54に組立物の組立順に部品a〜cを配列する部品運搬用ロボット1は、複数の収容器60a〜60cが並設された列に沿って敷設された軌道55上を自走可能な走行部2と、この走行部上に設けられた本体部3に可動自在に連接され、先端部に部品保持部を設けたアーム部4、5と、このアーム部に設けられ、軌道の方向に対する収容器の位置を検出する第1検知部と、同じくアーム部に設けられ、軌道に直交する方向に対する収容器の位置、及び当該収容器内に配列された部品の位置を検出する第2検知部と、走行部、アーム部の各動作を、第1検知部及び/又は第2検知部の検知結果に基いて制御する制御部と、を備える。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ワークの位置決めをする際には、作業者による判断や経験(勘やコツ)を活かしながら、位置決めの一部についてパワーアシスト装置に負担させることにより、ワークの位置決め作業に対する作業者の負担を軽減しつつ、位置決め精度の向上と作業性の向上を果たすパワーアシスト装置の制御方法を提供する。
【解決手段】制御装置2aを備え、作業者の作業動作をアシストするべく前記作業者の作業動作に協調して自律的に作動するパワーアシスト装置1の制御方法において、制御装置2aには、一連の作業タスクを複数の作業区間に分割し、作業区間ごとに制御ロジックが設定されるパワーアシスト装置1の制御方法であって、パワーアシスト装置1が自由度を有する作動方向ごとに、制御ロジックが設定される。
(もっと読む)
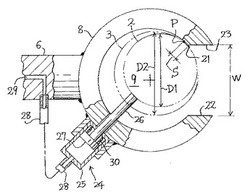
ヘッド部材付き軸状部品の供給装置
【課題】 供給管の出口開口から落下させたヘッド部材付き軸状部品を、ほぼ水平方向に進退する供給ロッドの先端部に設けた係止部材に対して、正確に係止することのできる供給装置を提供する。
【解決手段】 供給ロッド5でヘッド部材付き軸状部品1を目的箇所16へ供給する形式のものであって、部品1の供給管9を供給ロッド5に対して鋭角をなす向きで供給ロッド5の上側に配置し、供給管9の保持空間12に出口開口13が下向きに設けられ、出口開口13を開閉するゲート部材14が設けられ、このゲート部材14が開くことによって出口開口13から落下する状態で出てきた部品1を係止する係止部材7が供給ロッド5の先端部に設けられている。
(もっと読む)
ボールねじ、ボールねじの組立装置及びそれを用いたボールねじの組立方法
【課題】ナットに十分な数量のボールを充填し、ボールねじの耐久性を向上できるボールねじの組立装置及びそれを用いたボールねじの組立方法を提供する。
【解決手段】ボールプッシャ45の中心軸とナット3のねじ溝3aにボール4を充填した状態のボール4の内接円のオフセット量Lは、ボール径をDwとすると、Dw/2<L<Dwとすることが好ましい。より好ましくは、オフセット量Lをできる限りDw/2に近づける。オフセット量LがDwよりも大きいと、ボールプッシャ45の先端とねじ溝3aの軌道との間にボールが残留する可能性がある。
(もっと読む)
複合組付装置
【課題】円盤状部品とスナップリングとを、短時間で安定してケースに組み付けることができる複合組付装置を提供すること。
【解決手段】複合組付装置1は、メイン駆動源12によるメインベース部2の1回の前進動作によって、以下の各動作を連続して行う。複合組付装置1は、部品保持部5に円盤状部品86を保持し押出チャック部6にスナップリング87を保持して位置決め部41をケースに係合させる位置決め動作を行う。次いで、押出チャック部6によって部品保持部5から円盤状部品86を押し出して円盤状部品86をケースにおける組付穴に組み付ける部品組付動作を行う。次いで、押出チャック部6をリング用溝の近傍へ後退させるガイド準備動作を行う。その後、プッシャー部7によってスナップリング87を押出チャック部6から押し出してリング用溝へ嵌め込むリング嵌込動作を行う。
(もっと読む)
供給手段および部品供給装置
【課題】煩雑な制御を行うことなく、自動で部品を供給する供給手段およびこの供給手段を備える部品供給装置を提供する。
【解決手段】供給台車30に対し相対移動する部品棚130の被供給側係合バー161が供給側係合バー61に係合して押圧することにより、当該供給側係合バー61が、回動軸60とともに当該回動軸60を中心に係合前回動位置から係合時回動方向に回動する。この回動に伴い各付勢バー63a〜63cが回動軸60を中心として同一方向に回動することで、各付勢バー63a〜63cによる各回転アーム71a〜71cの付勢が解除される。この付勢解除により各回動軸および各ストッパ部材73a〜73cが各回動軸を中心に係止解除前回動位置から係止解除回動方向1に回動することで、当該各ストッパ部材73a〜73cによる部品Wa〜Wcの係止が解除されて部品Wa〜Wcが部品棚130へ自動で供給される。
(もっと読む)
電気抵抗溶接における電極の動作制御装置と制御方法
【課題】 供給ロッドの動作時間が異常に長くなったとき、自動的に電極の進出を禁止することのできる電気抵抗溶接における電極の動作制御装置と制御方法を提供する。
【解決手段】 供給ロッド10によって電極に部品1,39を供給し鋼板部品4に電気抵抗溶接をするものにおいて、供給ロッド10の復帰動作中または復帰終了時に電極進出動作信号を発信するセンサー手段27が設けられ、電極進出動作信号の発信時期が、所定時間以内であるか、あるいは所定時間の経過後であるかを判別するタイマー手段30が設けられ、所定時間以内であれば通常の電極進出動作を行わせ、所定時間経過後であれば電極進出動作信号を発信しないように構成した。
(もっと読む)
ロッドに圧着されるリングを有するロッドを備えた取付け具用のリング挿入圧着装置
【課題】
本発明は、ロボット(51)と、監視制御システム(54)と、ロッド上のリングを圧着するための先端具(53)とを備える、取付けロッド上のリングを穴に挿入・圧着するための装置(5)に関するものである。
【解決手段】
前記先端具(53)は、圧着装置と、微細位置決め装置に堅固に接続されるリング設置装置とを備え、それにより前記先端具(53)がロボット(51)の端部素子(52)に取り付けられる。前記リング設置装置のリング挿入部分組立体と前記圧着装置の圧着突出部は、先端具(53)が事前配置された時に、設置される取付け具の軸にロボット(51)の制御運動無しで二者択一的に配置されるように、前記先端具(52)上に移動することができる。
(もっと読む)
41 - 60 / 111
[ Back to top ]