
Fターム[3C030AA13]の内容
Fターム[3C030AA13]の下位に属するFターム
マガジンそのもの (19)
Fターム[3C030AA13]に分類される特許
1 - 20 / 38
円錐ころ供給装置、円錐ころ軸受組立装置、及び円錐ころ供給方法
【課題】簡便な構成で、円錐ころを保持器のポケットに適切に装入することが可能な円錐ころ供給装置、円錐ころ軸受組立装置、及び円錐ころ供給方法を提供する。
【解決手段】上方から充填された複数の円錐ころ1を、積み重ねられた状態でその内部にストックするチューブ20と、チューブ20から排出される複数の円錐ころ1のうち、最下段の複数の円錐ころ1と、該最下段の円錐ころ1の上方に位置する円錐ころ1と、を上流及び下流方向に切り分けて、最下段の円錐ころ1を順次1個ずつ落下させる円錐ころ供給部30と、を有する。
(もっと読む)
電池組付け装置

【課題】電池と枠体とを高精度に組付け生産性の高い電池組付け装置を提供すること。
【解決手段】一端側を中心にして他端側端部が同一円周上を回転する回転アーム21,31および、電池2又は枠体3を把持して回転アーム21,31の他端側端部に揺動可能にピン結合された先端治具22,32を備え、先端治具22,32が回転アーム21,31に対して回転方向に所定角度傾くように伸縮可能な弾性部材23,33によって連結された電池組付け手段11および枠体組付け手段12と、対になった回転アーム21,31を逆方向に同期して回転させる駆動機構とを有し、電池組付け手段11および枠体組付け手段12は、両方の回転アーム21,31の回転中心を結んだ直線上に移動させた電池2および枠体3に対し、回転アーム21,31と先端治具22,32を介して電池2および枠体3の略中央部にほぼ直交するように押し付け力を作用させる電池組付け装置10。
(もっと読む)
タイヤ製造用モールドの締め付け機
【課題】タイヤ製造用モールドの組み立ておよび分解のためのボルトの締め付けおよび取り外し、ボルトの供給および排出を自動的に行うタイヤ製造用モールドの締め付け機を提供する。
【解決手段】モールドの組立、分解用のテーブルの下方に配置され、かつ正逆転によりボルトの締め付け、弛めを行うレンチ部が、上向きの状態で昇降可能に配置されたボルト締め付け装置と、ボルトをレンチ部に供給するボルト供給装置とを備え、ボルト供給装置が、ボルト軸が上向きのボルトが装填されたボルトマガジンと、開閉自在で、かつ旋回可能な一対の把持体が昇降可能に配置された供給チャック装置とを備え、一対の把持体が、ボルトマガジンのボルトを挟持して上昇して、ボルトがボルトマガジンから取り出され、一対の把持体が、レンチ部の上方まで旋回した後にボルトを開放することにより、ボルトがレンチ部に取り付けられるタイヤ製造用モールドの締め付け機。
(もっと読む)
インサートナット載置支援装置
【課題】 効率よくインサートナットを成形品に載置することができることに加え、簡素な構造で、小型、安価であると共に設置面積が小さくてよいインサートナット載置支援装置を提供する。
【解決手段】 正規の姿勢のインサートナットNを蓄積するインサート蓄積スリーブ210と、インサート蓄積スリーブ210に蓄積されたインサートナットNのネジ孔を貫通すると共にインサート蓄積スリーブ210から突出する先端220fまで延び、インサート蓄積スリーブ210から放出されるインサートナットNを成形品の凹部に案内するインサート案内ピン220と、インサート蓄積スリーブ210の先端210fに設けられ、インサート蓄積スリーブ210に蓄積されたインサートナットNをトリガ操作に応じて1つずつ放出するインサート放出ヘッド230とを有している。
(もっと読む)
プロジェクションナットの停止位置決め部材および供給装置
【課題】プロジェクションナットを安定した姿勢で一時係止し、保護板の耐久性を向上させることのできるプロジェクションナットの停止位置決め部材および供給装置の提供。
【解決手段】少なくとも2つの溶着用突起4を有するプロジェクションナット1を対象とするものであり、ナット1を吸引して所定の箇所に受け止める停止面28が形成され、この停止面28にナット1の横側面2Aに密着する受け面31が停止面28から浮上した状態で形成され、この受け面31はナット1の押出し方向に延びている停止位置決め部材9である。また、この部材9を組み付けた供給装置である。ナット1の横側面2Aが受け面31に面当たりで受止められるので、ナット1の一時係止が安定した状態で実現する。
(もっと読む)
部品組付装置
【課題】エネルギー資源を消費せず、設備全体がより小型で済む部品組付装置を提供する。
【解決手段】ワークWを支持可能なワーク支持部12を組付位置に移動させるワーク供給機構6と、部品マガジン13から一つのリング状部品Pを組付位置Aに送り込む部品供給機構7と、組付位置AにおいてワークWにリング状部品Pを装着する部品装着機構8と、単一のハンドルHを変位させる操作に基づいて、ワーク供給機構6によるワーク支持部12の移動と、部品供給機構7によるリング状部品Pの送り込みと、部品装着機構8によるリング状部品Pの装着とを完結させる運動変換機構35,36,50とを設けた。
(もっと読む)
ワーク搬送装置及びワーク処理装置
【課題】本発明は、構造がシンプルな位置決め手段によりワークを搬送ライン上の所定箇所に確実に位置決め可能なワーク搬送装置を提供することを課題としている。
【解決手段】本発明は、被処理物であるワークWが載置されたパレット9を搬送ラインLに沿って搬送する際に位置決め手段13によって搬送ラインLの所定箇所にパレット9を位置決め可能なワーク搬送装置において、前記パレット9を搬送ラインLに沿ってスライド案内するガイドレール8及びパレット9を搬送下流側に駆動させる駆動手段11を備え、位置決め手段13がガイドレール8方向に対して交差方向を向いてパレット9側に突出作動可能な係合片21を有する位置決め装置であり、前記係合片21が突出してパレット9側の係合部19と係合することによりパレット9がガイドレール8に対して位置決めされる。
(もっと読む)
複数の外歯が設けられたリングプレートを当該外歯が位置合わせされた状態に積み重ねるための作業装置
【課題】複数の外歯が設けられたリングプレートを、外歯が位置合わせされた状態に積み重ねるとき、かかる外歯の位置ずれを調整するための作業が煩雑になること。
【解決手段】プレート20を回転可能に貫通する柱状部12と、プレート20を順次積み重ねた状態に載置可能なテーブル1と、進退可能なベース2とを設け、このベース2は、プレート20に向かって突出する2つのアーム部材3と、このアーム部材3が開くように当該アーム部材3をベース2に連結する連結手段4と、アーム部材3が開くときにアーム部材3を初期位置に復帰させるための付勢力を発生するアーム復帰手段5とを備え、2つのアーム部材3の先端がベース2の接近によってプレート20と接触可能であって、当該アーム部材3の相互間の間隔は、一方のアーム部材が外歯21に対して向き合うと同時に、他方のアーム部材が当該プレート20の歯底22に対して向き合う位置とする。
(もっと読む)
部品供給装置
【課題】簡単な機構で組み立て効率を向上させることができる部品供給装置を実現する。
【解決手段】部品供給装置10は、ターンテーブル12と遮蔽板14と複数のマガジン16a、16bを備えている。遮蔽板14は、ターンテーブル12の上面から立ち上がっており、ロボット30の動作エリアと作業者の作業エリアを仕切る。マガジン16は、ロボット30へ供給する部品を収納している。夫々のマガジン16は、遮蔽板14によって区分されるターンテーブル12の上面の各領域に配置されている。この部品供給装置10は、ターンテーブル12を回転させることによって、動作エリアに位置していたマガジン16bを作業エリアに移動させるとともに、作業エリアに位置していたマガジン16aを動作エリアに移動することができる。動作エリアと作業者の作業エリアを仕切る遮蔽板14の開閉とマガジン16の移動を簡単な構造によって短時間に実行することができる。
(もっと読む)
ボルト締付け方法及び装置
【課題】ワークに複数のボルトを能率良く締付けられるようにする。
【解決手段】締付けヘッド1に、ナットランナ3の出力軸に交換自在に連結される少なくとも2個のソケット41,42と、ソケット交換機構6と、ボルト供給機構7とが搭載される。ソケット交換機構6は、各ソケット41,42をナットランナ3の出力軸の軸線に合致する使用位置と該軸線から離隔した待機位置とに移動させる移動機構61と、各ソケット41,42を待機位置への移動時に上向き姿勢にし、使用位置への移動時に締付け姿勢にする姿勢変更機構64とで構成される。ボルト供給機構7は、ボルトマガジン81,82とボルト把持手段91,92とで構成される。ボルトマガジン81,82に保持される複数のボルトBの1つをボルト把持手段91,92で把持し、一方のソケットによるボルト締付け工程中に、待機位置に存する他方のソケットにボルト把持手段によりボルトBを供給する。
(もっと読む)
多関節ロボットアームの関節部構造、及びミニエンバイロメント装置
【課題】ケーブルの耐久性を向上し、発塵の量も軽減できる、多関節ロボットアームの関節部構造と、ミニエンバイロメント装置を提供することを課題とする。
【解決手段】多関節のロボットアーム20bの関節部構造を構成する第1関節軸21a、第2関節軸21b、及び第3関節軸21cを中空軸とする。中空部21a1、21b1、及び21c1には、樹脂からなる円筒状の部材である保護部材213を圧入して、中空部21a1、21b1、及び21c1の内周面を保護部材213で被覆し、ケーブル23の通路となる配線挿通孔を形成する。このような多関節のロボットアーム20bの関節部構造を具備する搬送ロボット20を、ミニエンバイロメント装置に備える。
(もっと読む)
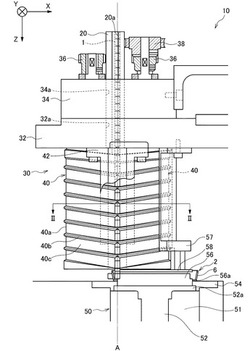
ニードルローラ整列供給装置及びこれを備えたトリポード部材組立装置
【課題】トリポード部材の脚軸部外周面に複数のニードルローラを効率的に且つ確実に整列供給することができるニードルローラ整列供給装置などを提供する。
【解決手段】ニードルローラ整列供給装置は、第1円筒部材22と、第1円筒部材22内に少なくとも一部分が挿入された状態で配置され、外周面には、ニードルローラ208がそれぞれ収容される複数の溝25aが軸線方向に沿って形成された第2円筒部材24と、第1円筒部材22の先端部よりも脚軸部側に突出するように且つ環状に設けられ、第2円筒部材24の各溝25a内にあるニードルローラ208を溝25a側に押し付けて挟持する挟持機構40と、第1円筒部材22と第2円筒部材24との間に配置される第3円筒部材23と、これら各円筒部材22,23,24を駆動する駆動機構とを備える。
(もっと読む)
ワーク供給装置
【課題】 ワークにドリル等の工具で貫通孔を形成する際にも次のワークに傷を付けたり変形させたりするおそれがなく、ワーク収容部を回転させることによる振動等の発生を防止できるワーク供給装置を提供する。
【解決手段】 複数のワークを同一の軸線上に整列して収容するワーク収容部(110,120)を有し、ワーク収容部(110,120)に収容されたワークを、作業機械の作業位置(A)に供給するワーク供給装置であって、ワーク収容部(110,120)を、作業位置(A)に位置決めされたワークwとこのワークwに隣接するワーク収容部(110,120)内のワークwとを離間させるように進退移動自在に設けた。
(もっと読む)
部品運搬用ロボット、及び同ロボットを用いた部品の順立て供給システム
【課題】安価で対象物を正確に認識できる部品運搬ロボット、及び同ロボットを用いた部品の順立て供給システムを提供すること。
【解決手段】部品供給部54に組立物の組立順に部品a〜cを配列する部品運搬用ロボット1は、複数の収容器60a〜60cが並設された列に沿って敷設された軌道55上を自走可能な走行部2と、この走行部上に設けられた本体部3に可動自在に連接され、先端部に部品保持部を設けたアーム部4、5と、このアーム部に設けられ、軌道の方向に対する収容器の位置を検出する第1検知部と、同じくアーム部に設けられ、軌道に直交する方向に対する収容器の位置、及び当該収容器内に配列された部品の位置を検出する第2検知部と、走行部、アーム部の各動作を、第1検知部及び/又は第2検知部の検知結果に基いて制御する制御部と、を備える。
(もっと読む)
ワーク把持装置
【課題】積層配置された複数のワークを同時にかつ強固に把持できるワーク把持装置を提供すること。
【解決手段】把持装置1は、一列に配置された複数の円筒状のコレット11と、これら複数のコレット11同士の間に配置された複数の円筒状の駒12と、複数のコレット11および駒12に挿通されて、複数のコレット11および駒12を両端側から挟んで加圧する加圧装置20と、を備え、駒12の外径は、中央部では、コレット11の内径よりも大きく、中央部から両端部に向かうに従って小さくなり、両端部では、コレット11の内径よりも小さくなる。
(もっと読む)
部品供給方法及び部品供給ヘッド
【課題】作業装置の作業範囲の拡大化を図ること。
【解決手段】ナット供給方法は、スポット溶接機200にナット800を供給するとき、ナット供給部1のナット収容通路12内の先頭ナット800Aがスポット溶接機200に供給されるたびに、マガジン4のナット収容通路41内の先頭ナット800Bをナット供給部1のナット収容通路12の後端部に移送し、マガジン4のナット収容通路41内のナット800が消費され、マガジン4が空状態になったとき、マガジン装着部2により、空状態のマガジン4Bを離脱し、その後、マガジン装着部2により、ナット800が充填された充填状態のマガジン4Aを装着する。
(もっと読む)
トレイ移送式部品組み立てシステム
【課題】コンパクトで生産性に優れシステム変更性に優れたトレイ移送式部品組み立てシステムを提供すること。
【解決手段】ワーク搬送ライン20、21に沿って配列された多数の組み立てステーション1〜6とワーク搬送方向に配列された多数のトレイキャリヤ8〜19の間にワーク搬送方向に伸びる直線状の走行スペースを設け、この走行スペースにトレイハンドリングロボット7を直線走行させる。トレイハンドリングロボット7は、トレイキャリヤ8〜19と組み立てステーション1〜6との間の部品収容トレイの受け渡しを行う。これにより、フレキシビリティに優れた組み立てシステムを構築することができる。
(もっと読む)
部品供給システム
【課題】システムの設計にあたっての自由度を向上させることができ、しかも、作業範囲が拡大される部品供給システムを提供すること。
【解決手段】上流側ナット供給装置6と下流側ナット供給装置3を互いに接続及び分離させる可動装置1を設け、可動装置1により上流側ナット供給装置6と下流側ナット供給装置3とが互いに接続状態にあるとき、上流側ナット供給装置6は下流側ナット供給装置3に所定個数のナット4を一括供給し、また、可動装置1、7により上流側ナット供給装置6と下流側ナット供給装置3とが互いに分離状態にあるとき、下流側ナット供給装置3はスポット溶接機2にナット4を供給する。
(もっと読む)
部品搬送装置および方法ならびに作業ハンド
【課題】部品の搬送および空の部品箱の回収を行うシステム全体を簡素化して設備コストを抑える。
【解決手段】作業ハンド25を備えたロボット5は、上下ガイド部9および走行ガイド11によって部品棚1の各間口に対して移動可能であり、部品棚1に収容した部品箱3内の部品を作業ハンド25の先端に設けたバキュームカップで吸着把持してキット箱7に投入する。この際キット箱7は、ロボット5と一体となって移動するキット箱支持部15に移載された状態である。空になった部品箱3は、作業ハンド25を空の部品箱3の下部に侵入させた後、上昇させることで、上部に設けてある第1,第2各部品箱受け板上に載せ、外部の空箱回収部61に搬出する。
(もっと読む)
生産システム用汎用セル及び該汎用セルを用いた生産システム
【課題】生産システムを構成する汎用セルとしての高い汎用性によってラインレイアウトの自由度を高く維持し、ひいてはライン構成の変更等に際しての時間的、コスト的なロスをより好適に削減する。
【解決手段】生産システムを構成する汎用セルとして、被加工物(ワーク)の加工に最低限必要とされる要素、すなわちロボット60が支持されたベースユニット10、ロボット60に対してワークの部品を供給する部品供給ユニット20、そしてベースユニット10の上に設けられる加工エリア30をセットとして1つの汎用セル100を構成する。ベースユニット10は、平面形状が正六角形からなって、少なくともワークの搬送に用いられるロボット60をこの正六角形からなる平面領域上を移動可能に支持する。そして、このロボット60の動作範囲を、加工エリア30を含むかたちで、ベースユニット10の内側から外側に至る範囲に設定する。
(もっと読む)
1 - 20 / 38
[ Back to top ]