
Fターム[3C269BB08]の内容
数値制御 (19,287) | 目的、目的を達成するための改良点 (2,252) | オペレータの操作性の向上 (584) | プログラム作成、変更時の操作 (357)
Fターム[3C269BB08]の下位に属するFターム
ティーチングの容易化 (119)
Fターム[3C269BB08]に分類される特許
221 - 238 / 238
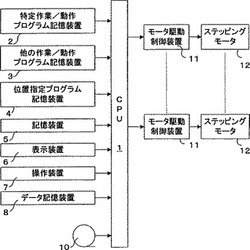
ロボットの動作設定方法
【課題】
作業や移動順序等の実行条件を位置に関して設定することで指定された位置で予め決められた作業を実行するロボットの動作設定方法を提供する。
【解決手段】
ロボットで実行可能にするために、実行条件を位置に関して設定する。そして、位置設定プログラム、作業及び動作プログラム及び位置設定プログラムで設定された位置のデータ及当該位置に関して設定された作業及び動作、設定された位置間の移動順序を設定する手段で設定された移動順序に基づいて、位置のデータと当該位置に設定されたプログラムとを一致させて、設定された位置間の移動途中においてプログラムに基づく所定の動作を実行させる制御命令が設定されて、定された制御命令が前記位置に関連して記憶される。
(もっと読む)
ロボット

【課題】
作業や移動順序等の実行条件を位置に関して設定可能なロボットを提供する。
【解決手段】
作業を実行する複数の位置を設定する手段で複数の位置を設定し、該設定された位置における作業を設定する。そして設定された位置間の移動順序を設定する。
その作業を設定する手段は、予め用意された作業プログラムから作業を設定し、設定された複数の位置に基づく移動位置と順序は、作業内容によって又は移動先を表すデータが与えられることのいづれかで決定される。
当該移動位置データと当該移動位置に設定された作業プログラムとを一致させて、位置間の移動途中において作業プログラムに基づく所定の動作を実行させる制御命令を設定して記憶させる。制御装置は設定された位置において、設定された作業を実行させることで、各設定に基づいてロボットの作業を機能させる。
(もっと読む)
複合テープコースを規定するコンピュータで実現される方法、複合テープコースを規定するためのコンピュータプログラムプロダクトおよびテープコース生成機
【課題】比較的複雑な表面にテープコース定義を効率的に生成できる方法および装置を提供する。
【解決手段】テープコース生成機はCNC複合テープ積層機械をプログラムする際の使用のためのテープコース定義を生成する。テープコース生成機は外形付きの表面をパラメトリック基準表面にマッピングする基準表面パラメータ化機と、基準表面を基準面にマッピングする基準面インスタンス化機とを含む。テープコース生成機はテープ境界を描くテープ境界プロッタと、テープ境界および層境界を基準面にマッピングする境界マッパーとをさらに含む。さらに、テープコース生成機は層境界とテープ境界との交点を識別する交点ロケータと、テープ切断を規定し、基準面のどの点がテープコース内にあるかを判定するテープコースデリミタとを含む。さらに、テープコース生成機は規定されたテープコースをマッピングして外形付きの表面に戻すテープコーストランスフォーマを含む。
(もっと読む)
ロボットにおけるコンピュータ読み取り可能な記録媒体及びコンピュータ読み取り可能な記録媒体を備えたロボット
【課題】
作業や移動順序等の実行条件を位置に関して設定されるロボットにおけるコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】
ロボットで実行可能にするために、位置設定プログラム、作業及び動作プログラム及び位置設定プログラムで設定された位置のデータ及当該位置に関して設定された作業及び動作、設定された位置間の移動順序を設定する手段で設定された移動順序に基づいて、設定された位置間の移動途中においてプログラムに基づく所定の動作を実行させる制御命令が設定されて、定された制御命令が前記位置に関連して記憶され、ロボットにおけるコンピュータ読み取りが実行される。
(もっと読む)
NC加工データ作成方法
【課題】 3次元の自由曲面を高精度に加工するNCデータを作成する際に、CAD・CAMシステムにおいて一面として取り扱える構成点数に制限があり、必要な精度のNCデータが作成できず、設計通りに加工ができなくなる問題を、別システムを用意することなく解決する。
【解決手段】 自由曲面式から求めた加工面を表わす複数の座標点から、近似曲面を作成し、この面に工具半径分のオフセットを与えて、NCデータを作成するシステムにおいて、加工面を、隣接面の端部同士が相互に重なる状態で複数面に分割し、各分割面毎に求められたオフセット面から、上記重なり幅の半分程度の長さだけ端部を排除した状態で、複数のX−Z断面近似曲線を作成し、重なり部分で同一位置にある近似曲線の端をつなぎながら各分割面毎に、円弧・直線への近似によってNCデータを作成し、加工面全体の合成NCデータを得る。
(もっと読む)
GコードからSTEP−NCパートプログラムに変換する方法
【課題】GコードからSTEP−NCパートプログラムに変換する方法を提供する。
【解決手段】本発明は、Gコード形式のパートプログラムをSTEP−NC言語形式のパートプログラムに変換させる方法に係り、より詳細には、Gコード形式のパートプログラムと工具情報とからGコードを解析する過程を経て加工工程情報と加工形状情報及び加工方式情報などで構成されるSTEP−NC言語形式のパートプログラムを自動生成することによって、現場で主に使われるGコード形式のパートプログラムを煩わしい修正なしにもSTEP−NC制御器に容易に適用することができる方法に関する。
本発明によるGコードからSTEP−NCパートプログラムに変換する方法は、STEP−NCパートプログラムの生成に必要なGコードパートプログラム、工具情報及び当該Gコードを解読することができる数値制御器情報を入力される段階と、該入力されたGコードパートプログラムを数値制御器種類によって分析してGコードブロック情報を生成させる段階と、Gコードブロック情報を用いて特徴的なブロックを検出し、特徴的なブロックを境界にGコードブロックをグループ化して、全体パートプログラムをセットアップ実行段階と多数の加工実行段階とに区分されるように実行段階単位で分割する段階と、各加工実行段階別にそれに対応するGコードブロック情報を用いて、工具情報、機械機能情報及び加工技術情報を生成させ、情報を用いて、荒削または仕上加工を区分する加工工程情報を生成させる手段と、素材領域から切削される領域をブーリアン演算作業で除去して、当該加工実行段階の加工形状情報を生成させる手段と、工具の進退戦略または加工戦略を含む加工方式情報を生成させる手段とを含む加工実行段階の内部情報を生成させる段階と、各加工実行段階の内部情報がすべて生成されれば、加工実行段階をGコードパートプログラムで遂行した加工工程と同一な順序で並べてSTEP−NCパートプログラムを生成させる段階と、を含んで構成される点を特徴とする。
(もっと読む)
1組のヘッドを有するマルチヘッド複合材料貼付け機械についてのヘッド割当をモデリングする方法を実行するための1組の命令を含むコンピュータソフトウェアが組込まれたコンピュータ可読媒体、1組のヘッドを有するマルチヘッド複合材料貼付け機械のヘッド割当をモデリングするためのシステム、および1組のヘッドを有するマルチヘッド複合材料貼付け機械についてのヘッド割当をモデリングする方法
【課題】1組のヘッドを有するマルチヘッド複合材料貼付け機械についてのヘッド割当をモデリングする方法およびシステムを提供する。
【解決手段】1組のヘッドを有するマルチヘッド複合材料貼付け機械についてのヘッド割当をモデリングするために、複合部品についてのプライの形状が受取られ、マルチヘッド複合材料貼付け機械についての構成が受取られる。加えて、プライの形状と、マルチヘッド複合材料貼付け機械についての構成とに応答して、ヘッド位置の配置が生成される。さらに、ヘッド位置の配置のうちのヘッド位置が、1組のヘッドのうちの対応するヘッドに割当てられ、複合部品に複合材料を貼付けるマルチヘッド複合材料貼付け機械のグラフィカルモデルが、割当てられたヘッド位置に応答して生成される。
(もっと読む)
マルチヘッド複合材料使用機械を動かすプログラムを作成する方法、マルチヘッド複合材料使用機械をプログラムするためのコンピュータプログラムプロダクト、およびマルチヘッド複合材料使用機械を動かすプログラムを作成するための複合部品プログラムポストプロセッサ
【課題】複合部品プログラムを効率的に作成できる方法および装置を提供する。
【解決手段】コンピュータ数値制御(CNC)マルチヘッド複合材料使用機械とともに使用するための複合部品プログラムを作成する複合部品プログラムポストプロセッサ。ポストプロセッサは定義受信器、ルートデリニエータ、接近および離脱プロファイラ、機械軸解コンピュータおよび出力ファイルコンポーザを含む。定義受信器はたとえば複合部品プログラム生成器から材料使用経路定義を受取る。ルートデリニエータはツールキャリッジおよび製造ツールのルートを描く。さらに、接近および離脱プロファイラは接近および離脱のプロファイルを経路に追加し、機械軸位置コンピュータは機械軸位置を計算して複合材料使用機械を制御しかつ複合材料使用ヘッドを経路に沿って案内する。出力ファイルコンポーザはCNC複合部品プログラムを組合せる。
(もっと読む)
マルチヘッド複合材料供給マシンのプログラミング方法および複合構造の製造装置
【解決手段】複合部品プログラム発生器は、コンピュータ支援設計(CAD)システムインターフェースと、パス発生器と、コースヘッド管理装置と、ポストプロセッサと、マシンシミュレータとを含んでいる。複合部品プログラム発生器は、比較的平坦な、または形状化された、またはほぼ円筒形の複合部品を含む複雑な複合部品を製造するために、複合テープ積層マシンまたは自動化されたファイバ配置(AFP)マシンのようなマルチヘッド複合材料供給マシンで使用するための複合部品プログラムを生成する。
【効果】このプログラミング方法は、手作業または既存の自動化されたプログラミング方法に関してマルチヘッド複合材料供給マシンのための複合部品プログラムを生成するために必要な労力と時間を大幅に減少させることができる。
(もっと読む)
加工工程の決定方法
【課題】 加工能率の高い加工工程を迅速に決定する。
【解決手段】 複数の工程候補の中から加工能力の高い順に工程候補を選定し、その工程候補によって加工することのできる最大加工領域を加工前の形状と加工後の形状から求め、最大加工領域と加工後の形状の差分を求め、その差分が許容値以下になるまで工程候補の選定を繰り返す。選定した工程候補を配列して、最後に選定した工程候補を最終の工程とする複数の工程順序候補を生成する。各工程順序候補について、各工程の加工能力、加工量と負荷時間から実効加工時間を求め、各工程の実効加工時間を総和して総実効加工時間を求め、総実効加工時間が最短になる工程順序候補を加工工程に決定する。
(もっと読む)
ロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置
【課題】本発明は、オフラインで作成されたロボットの動作プログラムの修正作業を短時間で容易に行うことができるロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置を提供する。
【解決手段】コンピュータを用いてロボットが所望の動作を行うようにロボットの動作プログラムを修正するためのロボットプログラム評価・修正装置であって、コンピュータシミュレーションにより、ロボットの動作部分を駆動するモータの負荷をシミュレーション毎に算出する負荷算出手段13と、モータに対する指令速度及び指令加速度と前記モータ負荷を時系列に関連づけて記憶する記憶手段14と、モータ負荷を評価関数により評価する判定手段15と、シミュレーションを繰り返し実行し、モータ負荷の許容範囲内でモータのサイクルタイムが最小になるように、指令速度及び前記指令加速度を修正する修正手段16と、を備える。
(もっと読む)
鋼材加工方法及び鋼材識別方法
【課題】識別マークを鋼材に付すためのマーキング装置及びマーキング工程を格別に設けることなく、鋼構造用鋼材の加工時に鋼材表面に識別マークを付与する。
【解決手段】鋼構造物を構築するための構造用鋼材のソリッドモデルをCADシステムにより作成する際に、鋼材の施工位置及び向きの情報を示す識別マークの表面輪郭をソリッドモデルに形成する。識別マークの表面輪郭を含むソリッドモデルのデータをCAMシステムによって数値制御データに変換し、鋼材加工用のNC加工機に入力する。
(もっと読む)
3次元製品作成方法及びその装置、3次元製品加工用モデル作成プログラム
【課題】被加工物の弾性変形や塑性変形を低減し、加工精度や加工表面粗さなどの加工品質と高速な加工速度とを両立させること。
【解決手段】各サポートを繋いでフレーム面にラインを作成し、このラインによって凹側形状の一方の加工方向側と凸側形状の他方の加工方向側とに分割する分割部と、NCデータのうち3次元製品加工用モデルの凹側形状となる一方の加工方向側のNCデータに従ってNC加工機を動作制御して被加工物を加工する第1の加工制御手段と、NCデータのうち3次元製品加工用モデルの凸側形状となる他方の加工方向側のNCデータに従ってNC加工機を動作制御して被加工物を加工する第2の加工制御手段とを具備する。
(もっと読む)
作業機械の制御システム
【課題】
制御対象の制御軸をある時は同期して、ある時は独立に制御することができる作業機械の制御装置を提供する。
【解決手段】
2軸以上で構成される複数の制御対象を制御する作業機械の制御装置において、各制御対象1、2の各軸を駆動するモータなどのアクチュエータを制御する際に、アクチュエータと制御対象1、2を関係付ける軸構成情報入力手段203を備え、制御対象への動作指令をアクチュエータに出力する際は、軸構成情報入力手段203で作成された、制御対象と物理的なアクチュエータの接続関係を記す物理軸構成情報に基づいて、動作指令を所定のアクチュエータに分配する指令分配処理部208を備えた作業機械の制御装置。これにより、重複したアクチュエータは同時に同期して制御できるし、切り離されて独立に非同期に制御できるため、作業効率の向上が図られる。
(もっと読む)
回転機械の制御指令自動発生装置及び方法
【課題】回転機械を駆動させる制御プログラムの自動的発生を、情報の対話的入力により可能にする装置及び方法を提供する。
【解決手段】回転機械上に設けられ、回転機械の対する制御指令を発生する処理ステーションであって、その入力及び表示端末が、
第一メニューレベルにて回転機械上に区分を選択及び/又は決定する可能性を提供し、
第1にメニューレベルで選択された区分に関して、回転機械及び/又は処理ステーションの機能を第2のメニューレベルで表示し、ここでこれ等機能は選択、且つ区分内で制御可能であり、
斯く規定された機能及びそれ等の区分内制御に基づいて制御指令を発生するように構成される手段を含んで成る処理ステーション。
(もっと読む)
CNC工作機械制御プログラムを作成する方法
工作機械プログラムエディタ(42)が、補助動作、例えば、測定、工程制御、プログラム論理をCNC工作物製造プログラムの中に挿入するために使用される。エディタ(42)は、このプログラム中の正しい位置に配置され得る動作の表示(50、図3)を有する。表示が選択されるとき、パラメタの形でユーザ入力が促される。このプログラムは、後処理されて(46)、これらの動作が実行される工作機械(30)で実行される。  (もっと読む)
(もっと読む)
成形部品の成形プロセスを記述するためのプロセス動作の決定
この発明は、例えば深絞り/引張り成形プロセスによるシートメタル成形部品の製造中の処理工程を決定し、最適化する分野に関する。成形部品の成形プロセスの記述のためのプロセス動作(PO1−PO6)をコンピュータ支援設計システムによって決定する間に、以下の工程が行われる。
・ 目標状態における成形部品のジオメトリのコンピュータ化された記述のためのジオメトリモデルを規定する工程と、
・ いくつかのジオメトリ演算子(m1−m9,e1−e6)を規定するステップとを含み、ジオメトリ演算子(m1−m9,e1−e6)は第1のジオメトリモデルの領域のジオメトリを第2のジオメトリモデルの領域のジオメトリに関連づけ、かつジオメトリ演算子(m1−m9,e1−e6)は、2つの関連するジオメトリのうち一方から他方への遷移について記述し、
・ それぞれ少なくとも1つのジオメトリ演算子(m1−m9,e1−e6)であるいくつかのグループを規定する工程を含み、前記グループの各々はそれぞれプロセス動作(PO1−PO6)に関連付けられる。
これにより、プロセス動作(PO1−PO6)のシーケンスのそれぞれの処理工程の構造化された処理が、これによって達成された幾何学的な修正を対応する部品ジオメトリモデルに割当てることにより達成される。  (もっと読む)
(もっと読む)
三次元の物体の外面を、バーチャルに、もしくはプラスチック、合成物または薄い材料に、調査、デジタル化、再生する、電子写真光学系
任意の種類の物体の外形を調査し、再度生成し、それをCAD 3Dシステム内に、バーチャルに、またはプラスチック、合成物または薄い材料に物質的に再生するべく、システム(1、2)の取得および再生ユニットはネットワーク(3、4、6)を用いて相互に接続される。  (もっと読む)
(もっと読む)
221 - 238 / 238
[ Back to top ]