
Fターム[3C269BB08]の内容
数値制御 (19,287) | 目的、目的を達成するための改良点 (2,252) | オペレータの操作性の向上 (584) | プログラム作成、変更時の操作 (357)
Fターム[3C269BB08]の下位に属するFターム
ティーチングの容易化 (119)
Fターム[3C269BB08]に分類される特許
121 - 140 / 238
3次元CAD/CAMシステム
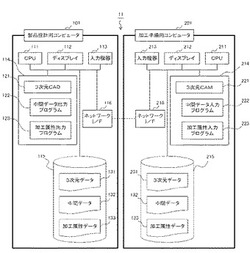
【課題】設計作業工数を簡素化して加工工数を削減する。
【解決手段】3次元CAD/CAMシステム11は、3次元CAD121で作成された製品の3次元データを、3次元CAD121と3次元CAM221との間で受け渡し可能にフォーマット変換して出力するもので、3次元CAD121は、3次元データに含まれる製品の形状情報をフォーマット変換して中間データ132を作成する中間データ出力プログラム122と、3次元データに含まれる製品に関する加工属性情報をフォーマット変換して加工属性データ133を作成する付加データ出力プログラム123と、加工属性データ133を中間データ132と関連付けて個別に格納する記憶部115とを備えている。
(もっと読む)
制御プログラム作成プログラム、及び制御プログラムの作成方法、繊維機械システム

【課題】一括制御プログラムを作成するのに要する労力を低減できるよう、基準となる個別制御プログラムを用意するだけで自動的に他の個別制御プログラムも作成されるプログラムを提供する。
【解決手段】ユニットコントローラ19が複数の紡績ユニット2を制御するのに供される一括制御プログラムを作成するための、制御プログラム作成プログラムにおいて、一括制御プログラムは、各紡績ユニット2に対応する固有の個別制御プログラム1−a〜1−d、2−a〜2−dを含むものであり、コンピュータに、基準となる個別制御プログラムとしての基準個別制御プログラム1−a、2−aを取得する第1の機能と、前記第1の機能によって取得した前記基準個別制御プログラム1−a、2−aに基づいて、他の個別制御プログラム1−b〜1−d、2−b〜2−dを作成する第2の機能と、を実現させる。
(もっと読む)
ロボットシミュレーション装置
【課題】ロボットの軌跡のうちのどの場所で信号出力が行われるかを表示する。
【解決手段】ロボットシミュレーション装置(10)が、ロボット(22)のモデルを表示する画面(17)と、ロボットの動作と信号出力とが記述されたプログラムをシミュレーションにより実行するシミュレーション手段(31)と、シミュレーション手段によりプログラムを実行したときのロボットの位置および信号出力の位置を時系列に算出する位置算出手段(32)と、位置算出手段により算出されたロボットの位置および信号出力の位置を時系列に記憶する記憶手段(13)と、記憶手段に記憶されたロボットの位置を時系列に画面上に表示する位置表示手段(35)と、位置表示手段により画面上に表示されたロボットの位置を結んだロボットの軌跡上に、記憶手段に記憶されたロボットの信号出力の位置を表す指標を表示する指標表示手段(36)とを含む。
(もっと読む)
精密加工のための最適加工条件の決定を支援する装置
【課題】技術者が精密加工のための最適加工条件を決定しようとする作業において、当該作業を効果的に支援できる装置を提供すること。
【解決手段】本発明は、精密加工のための最適加工条件の決定を支援する装置であって、ワークの加工条件とNCデータとを記憶する加工用データ記憶部と、加工されたワークに関する測定データを記憶する測定データ記憶部と、対応する加工条件及びNCデータと測定データとに基づく一まとまりのデータ群を一つのノードとして、各ノード間の派生関係を記憶する派生関係記憶部と、前記派生関係に基づいて、各ノードの情報をツリー図として表示する表示部と、を備えたことを特徴とする装置である。
(もっと読む)
CADシステム及びCAM加工情報の生成方法
【課題】 CAM加工情報を生成する三次元CADシステム及び三次元CADを利用したCAM加工情報の生成方法において、二次元CADを合理的に利用する手法を提供すること。
【解決手段】処理装置は三次元CAD画像を生成しモニタに表示可能であり、この三次元CAD画像からCAMによる加工情報を生成する。処理装置は、二次元輪郭抽出部、区画分割部、最高点抽出部及び二次元加工範囲抽出部を備え、二次元輪郭抽出部は製品における加工対象部側視で加工対象部の二次元輪郭を投影させて抽出する。二次元加工範囲抽出部は、各区画A〜Nと区画高さZ0〜Z4により定まる二次元加工範囲を抽出し、CAMによる加工情報を生成する。
(もっと読む)
加工用ロボットプラグラムの作成装置
【課題】視覚センサを有するロボットシステムについて、ワークの形状誤差を吸収できるとともに、教示作業に要する工数の大幅な削減に寄与する加工用ロボットプログラム作成装置を提供する。
【解決手段】仮想カメラからみたワークのグラフィック画像に対して、各検出範囲を含む画像検出モデルを順次生成する。ワークの加工線の各部分をそれぞれ加工するための教示点のデータを含む加工用プログラムを生成する。次に加工対象であるワークを実際に撮像し、検出モデルに対応した各部位の位置及び姿勢を検出するための検出用プログラムを作成する。視覚センサで実際に撮像し撮り込んだワークの画像と、画像検出モデルとの間の各部位における位置及び姿勢の変化量を計算して取得する命令を作成し、加工用プログラムに追加する。最後に、求めた変化量に基づいて、各部分を加工するための教示点を補正する補正命令を加工用プログラムに追加する。
(もっと読む)
ダクト製造プログラム及びその記録媒体並びにダクト製造システム
【課題】 一連のダクト管路の位置データをまとめて入力するだけで設定値以下の短管の寸法分を直管に組み入れた割付けを自動的に行う。
【解決手段】 コンピュータに、ダクト単体が相互に複数接続される一連のダクトを一つと見なしてその両端開口の位置関係を数値化した配置データを入力する手順と、この読み込んだダクト製作仕様データに基づいて一連のダクト管路のうち直管部分の長さを算出する手順と、定尺寸法仕様データを読み込む手順と、この読み込んだ定尺寸法仕様データに基づいて直管の定尺本数及びその中で最も短い直管の長さを算出する手順と、この最も短い直管の長さと短管の設定値を比較する手順と、この短管の設定値よりも長くなるように各ダクト単体の割り付けを行う手順とを順次実行させることにより、製作の困難な短管が直管で吸収される。
(もっと読む)
ロボットの動作経路作成装置及びロボットの動作経路作成方法
【課題】7個以上の関節を持つロボットにおいて、特異姿勢を回避した動作経路を高効率に作成するロボットの動作経路作成装置及び動作経路作成方法を提供することを課題とする。
【解決手段】7個以上の関節を持つロボットの動作経路を作成するロボットの動作経路作成装置1であって、ロボットの特定部位の位置及び姿勢を定義する経由点を設定する経由点設定手段3と、経由点に対する関節ベクトルの候補を生成する際に使用する関節の数を6個以下で設定する関節数設定手段3,5と、経由点毎に、ロボットの特定部位が経由点の位置及び姿勢となるための設定した数分の各関節の関節角度を計算し、当該各関節の関節角度からなる関節ベクトルの候補を複数生成する関節ベクトル候補生成手段6と、経由点毎の複数の関節ベクトルの候補の中からロボットが特異姿勢にならない各経由点の関節ベクトルの候補の組み合わせを選択する選択手段7とを備えることを特徴とする。
(もっと読む)
NCプログラム編集装置、NCプログラム編集プログラム及びNCプログラム編集プログラムを記録したコンピュータ読取可能な記録媒体
【課題】プログラム命令の入力操作の負荷を軽減したNCプログラム編集装置、NCプログラム編集プログラム、及びこれを記録した記録媒体を提供する。
【解決手段】入力文字によって全プログラム命令の中から候補となるプログラム命令に絞込を行い(S101)、さらに、工具情報記憶エリアを参照して使用中の工具がある場合には(S102:YES)、その工具を使用するプログラム命令に絞り込む(S103:YES、S104)。また、開始指令記憶エリアを参照して開始指令が記憶されていれば(S105:YES)、対応する終了指令に絞り込む(S106:YES、S107)。また、複数の候補がある場合には優先順位に従って並び替え(S108)、上位の4個を入力候補に確定する(S109)。
(もっと読む)
数値制御装置、数値制御プログラム及び数値制御プログラムを記憶した記憶媒体
【課題】所定の軸の駆動を停止させて工作機械を動作させる数値制御装置を提供する。
【解決手段】加工プログラムに「M300」指令があれば主軸フラグ「1」とする。「M301」指令があれば主軸フラグを「0」とする。「M302」指令があればテーブルフラグを「1」とする。「M303」指令があればテーブルフラグを「0」とする。主軸フラグが「1」、テーブルフラグが「1」ならば(S31:YES、S32:YES)、主軸の回転、テーブルの移動を禁止して処理を実行する。主軸フラグが「1」、テーブルフラグが「0」ならば(S31:YES、S32:NO)、主軸の回転を禁止して処理を実行する。主軸フラグが「0」、テーブルフラグが「1」ならば(S31:NO、S33:YES)、テーブルの移動を禁止して処理を実行する。主軸フラグもテーブルフラグも「0」ならば(S31:NO、S33:NO)、通常通り指示に応じた処理を実行する。
(もっと読む)
ロボット教示システム
【課題】ワークが替わるたびにプログラムを新たに作り直す必要がなく、ロボットの教示作業に必要な時間を短縮することができるロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ロボット11に取付自在のツール13と、ロボットコントローラ12を制御する制御部20とを備えている。制御部20は、ワーク固有データ30が入力される入力部21と、ロボット11の種類およびツール13の種類を指定する作業指定部22と、作業指定部22からの情報に基づいてロボット制御用中間言語31を作成する中間言語作成部23とを有している。最終言語作成部24において、ワーク固有データ30とロボット制御用中間言語31とに基づいてロボット制御用最終言語32が作成され、出力部25を介してロボットコントローラ12へ送られる。
(もっと読む)
数値制御装置、制御プログラム及び記録媒体
【課題】モーダル命令が正しく設定されているか否かを容易に確認できる数値制御装置、制御プログラム及び記録媒体を提供する。
【解決手段】数値制御装置の不揮発メモリには、工作機械の軸移動命令があった時に必要とされるモーダルGコードが設定された第1モーダル情報テーブル1321が記憶されている。CPUによって読み込まれたブロックに、軸移動に関連するモーダルGコードが設定されている場合、そのモーダルGコードが属するモーダルグループに対して指令フラグ「1」が設定される。次ブロックにて軸移動の命令があった場合、第1モーダル情報テーブル1321に設定された指令フラグに「0」がある場合、指令フラグが「0」であるモーダルGコードの記載漏れの疑いがある。この場合ディスプレイに警告が表示される。よってユーザはモーダルGコードの設定漏れを容易に確認できる。
(もっと読む)
工作機械制御装置
【課題】種々のタイミングで実際の加工工具の大きさを検出して仮想3次元モデルに反映することで、実際の工作機械により近い状態で仮想3次元モデルでの表示を行い、よりリアルな仮想3次元モデルを表示することができる工作機械制御装置を提供する。
【解決手段】摩耗する加工工具を備えた工作機械1を制御する制御手段と、工作機械の動作に同期させて仮想3次元モデルをシミュレート動作させることが可能なシミュレート手段と、仮想3次元モデルを表示する表示手段とを備えた工作機械制御装置40であって、実際の工作機械1の動作に合わせて仮想3次元モデルV1をシミュレート動作させて前記表示手段に表示し、摩耗した実際の加工工具の大きさと、仮想3次元モデル中で表示している加工工具の大きさとのずれを所定のタイミングで補正して、補正した大きさの加工工具を仮想3次元モデル中に表示する。
(もっと読む)
ロボットによるパレタイジング作業のためのロボットプログラミング装置
【課題】パレタイジング作業のプログラムの作成に必要な実機ロボットの操作を削減し、パレタイジングプログラムの作成に要する時間を短縮することを可能にしたロボットプログラミング装置を提供する。
【解決手段】ロボットプログラミング装置は、複数種類の荷物、コンベア、判別装置、ロボット及び複数のパレットの3次元モデルを記憶する記憶部と、記憶部に記憶された3次元モデルのレイアウトを仮想空間内で作成するレイアウト作成部と、レイアウトを画面表示する表示部と、表示部に表示された各機器に関する情報を設定する情報設定部と、3次元モデルのレイアウト、及び情報設定部に設定された情報に基づいてロボットのパレタイジングプログラムを生成するプログラム生成部と、を有する。
(もっと読む)
自動バックアップ機能を有する数値制御装置
【課題】 バックアップするファイルを選別して、バックアップにかかる数値制御装置の負担を軽くする。
【解決手段】 工作機械の数値制御装置1において、加工プログラム実行部6は、ワークの加工に必要な指令ファイル3を記憶部2から選択的に読み出し、その指令ファイル3に納められた加工プログラムとサブプログラムとを実行し、工作機械を運転する。制御ファイル更新部7は、オペレータが制御データを書き換えたときに、その制御データを納めた制御ファイル4を更新し、記憶部2に記憶させる。バックアップ制御部8は、加工プログラム実行部6が読み出した最新の指令ファイル3と、制御ファイル更新部7が更新した最新の制御ファイル4とをバックアップファイルとして記録媒体9に保存する。
(もっと読む)
レーザ加工装置、レーザ加工条件作成方法及びレーザ加工条件作成処理プログラムを記録した記録媒体
【課題】効率的にレーザ加工条件を作成できるレーザ加工装置、レーザ加工条件作成方法及びレーザ加工条件作成処理プログラムを記録した記録媒体を提供すること。
【解決手段】制御部は、記憶装置に記憶されたレーザ加工条件を複製するとともに、レーザ加工条件を設定データ毎に表示画面41に一覧表示するようにした。また、作業者が一覧表示された設定データを表示画面41上で選択し、編集ボタン63に接触することで変更できるようにした。そして、設定ボタン65に接触することで、表示画面41上で選択されたレーザ加工条件を制御部が記憶装置に記憶させるようにした。
(もっと読む)
工作機械によらないNC指令を入力する数値制御装置および加工方法
【課題】工作機械によらないNC指令を実際に適用して加工を行うための数値制御装置及び加工方法を提供すること。
【解決手段】数値制御装置1aは、機械情報記憶部10、適合性判断部20、指令変換部30、TEP NCにとって必須の構成要素であるNC指令解読部40と、CNC制御部50を備えている。11は機械情報、2は機械によらないNC指令、3は指令変換部30で変換された個別機械用指令である。CNC制御部50は通常の数値制御装置を構成する諸構成手段を備えている。NC指令2には、そのNC指令を実行する工作機械の種類と軸数、及び必要な動作ストロークの情報(加工機に対する要件)が記述される。現行のISO14649規格ではこれらの記述形式が規定されていないので、ヘッダ部にあらかじめ決めた書式で記述する。
(もっと読む)
プログラム再開機能を備えた数値制御装置
【課題】ワークに傷を付けないプログラム再開ブロックデータ取得方法を提供すること。
【解決手段】登録されている非切削指令は存在するか否か判断する(ステップS1)。登録されている非切削指令は全部解析したか否かを判断する(ステップS2)。登録されている非切削指令のデータを読み込み(ステップS3)、現在解析中のブロックは非切削指令か否かを判断する(ステップS4)。登録されている非切削指令はブロック始点でデータ取得するか否かを判断する(ステップS5)。ブロック始点でプログラム再開ブロックデータを取得しメモリに格納か、(ステップS6)、ブロック終点でプログラム再開ブロックデータを取得しメモリに格納し(ステップS7)、処理を終了する。
(もっと読む)
加工装置の工程管理システムおよび加工装置の工程管理方法
【課題】車種や工程の変更に拘わらず、加工装置の工程管理を容易に行う。
【解決手段】コンピュータ9は、加工対象となるクランクシャフトに該当する車種に応じた制御パラメータを記憶装置10から読み出す。そして、それぞれにクランクシャフトの所定の被加工部が割り当てられた複数の工程よりなる一連の加工プロセスにおいて、工程毎に、記憶装置10から読み出した制御パラメータのうち、現在の工程において加工される被加工部に関する制御パラメータを加工プログラムに反映し、この反映された加工プログラムに従って、加工装置1を制御する。
(もっと読む)
ロボットプログラム調整装置
【課題】試行錯誤を行うことなしに、負荷の大きい軸に掛かる負荷を軽減する。
【解決手段】複数の軸を有するロボットアームの動作プログラムを調整するロボットプログラム調整装置(11)が、ロボットアームの動作プログラムから動作命令を順次読込んでシミュレーションを実行することにより、過負荷が掛かる軸を複数の軸から特定する過負荷特定手段(12)と、過負荷特定手段により特定された軸以外の軸に対して付加的な動作を生成して、特定された軸の負荷を軽減する付加的動作生成手段(13)と、付加的動作生成手段により生成された付加的な動作に基づいてロボットアームの動作プログラムを調整するプログラム調整手段(15)とを含む。
(もっと読む)
121 - 140 / 238
[ Back to top ]