
Fターム[3C269BB08]の内容
数値制御 (19,287) | 目的、目的を達成するための改良点 (2,252) | オペレータの操作性の向上 (584) | プログラム作成、変更時の操作 (357)
Fターム[3C269BB08]の下位に属するFターム
ティーチングの容易化 (119)
Fターム[3C269BB08]に分類される特許
81 - 100 / 238
自動プログラミング装置及びその動作プログラム
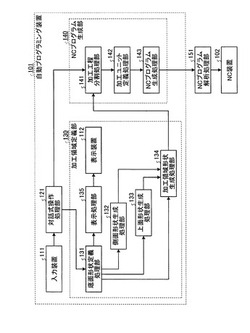
【課題】 従来のものより少ない情報量で多様な加工領域形状を定義することができる自動プログラミング装置を提供すること。
【解決手段】 データを取り込む入力装置111と、データを記憶する記憶装置と、記憶装置に記憶された底面形状の輪郭を構成する一連の稜線の稜線データ、及びこの稜線に関連した側面形状を特定する稜線の属性データにより、底面形状を定義する底面形状定義処理部131と、底面形状の稜線データ及び属性データとから特定される面を側面形状として生成する側面形状生成処理部132と、底面形状定義処理部131により定義された底面形状、及び側面形状生成処理部により生成された側面形状に基づいて加工領域形状を生成して記憶装置に記憶する加工領域形状生成処理部134と、を備えている。
(もっと読む)
工作機械におけるツール制御用の制御データの生成方法および生成装置

【課題】工作機械において、所定ツールを制御するための制御データの生成方法および生成装置を提供する。
【解決手段】クランプされた被工作物を、ブランク状態から完成部品に至るまで機械加工するための工作機械において、所定ツールを制御するための制御データの生成方法等に関し、機械加工時の被工作物の機械加工幾何学形状に関する幾何学形状モデルデータと、完成部品幾何学形状モデルデータと比べて、両者の間の異なる幾何学形状を決定するものである。そして、決定された異なる幾何学形状をもとに、機械加工パスが決定されて、それに沿って所定ツールが被工作物から材料を除去し、さらにパスデータが生成されて、所定ツールが、その最大機械加工量に依存して、機械加工パスを移動している間に、単位時間あたり、被工作物の異なる幾何学形状の大部分を最大限除去することを特徴とする。
(もっと読む)
ロボット教示システム
【課題】ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、位置領域情報36を入力する入力部22と、予め複数の図形ルートパターン37を蓄積させたパターン蓄積部38とを有している。通過位置設定部24は、図面データ25と、位置領域情報36と、図形ルートパターン37とに基づいてロボット11の通過位置を設定する。プログラム作成部31は、移動プログラム32を作成し、移動プログラム32は出力部33によりロボットコントローラ12へ送信される。
(もっと読む)
産業用ロボットの位置教示装置、産業用ロボットの動作教示装置およびプログラム
【課題】ロボットの周辺に関連機器を最適に配置するレイアウト設計と、各機器間のワークの受取り・引渡し関係を把握しつつ各機器の位置をロボットに教示する位置教示を同時に行うことができる位置教示装置を提供する。
【解決手段】レイアウト設計画面71において、設置領域図73にロボットイメージ77と、その周辺に関連するユニットのユニットイメージ52を表示する。各ユニットイメージ52を配置する都度、ワークの授受関係データに基づいて、設置領域図73上に配置された各ユニットイメージ52を結ぶと共にワーク搬送方向を指標する指標イメージ79を表示する。次に各ユニットイメージ52の設置領域図73上の位置に基づいて、各ユニットの位置情報をロボットに教示する。
(もっと読む)
NC加工装置
【課題】加工ツールの所定の加工部をワーク外周の所定の被加工部位に対して容易に対応関係を設定することができNC加工データの作成にそれほどの熟練を要しないNC加工装置を提供すること。
【解決手段】CAD/CAMシステムにおいて加工経路データを作成する際にモニター上にワークWの三次元モデルと加工ツール6の三次元モデルを表示させる。ワークW表面のばり取り部分を決定し、加工ツール6の当接部位を決定すると、モニター上で加工ツール6の当接部位がワークWの被加工部位に当接している状態が表示されることとなる。そのため、ワークWに対してツールがどのような位置・角度で接しているかをオフライン状態で仮想的に確認できることとなる。そして、加工経路データを作成すると、モニター上で加工ツール6がワークWに対して加工デモを行う。その加工経路データに基づいてNC加工データが作成されモニターの表示と同じ経路で加工が行われる。
(もっと読む)
NCデータの修正方法及び装置
【課題】ワーク形状のCADデータを参照しなくても、NCデータのみからワーク形状の曲面を復元し、当該曲面からNCデータを修正するNCデータの修正方法及び装置を提供する。
【解決手段】工作機械の加工パス用に作成されたワーク形状のNCデータを、当該ワーク形状のCADデータを用いずに修正するNCデータの修正方法及び装置において、NCデータを全て読み込んで、加工パス毎に分解し(ステップS1、S2)、隣接する加工パス同士からなる隣接パステーブルを作成し(ステップS3、S4)、1つの隣接パステーブルに属する全ての加工パスのNCデータを用いて、1つの曲面として復元することにより、全ての隣接パステーブルについての曲面を復元し(ステップS15)、復元した曲面上にNCデータの位置を補正する(ステップS16)。
(もっと読む)
工作機械およびその動作時間提示方法
【課題】所望のサイクルタイムを有する電子カムデータを、できるだけ少ない工数でNCプログラムから生成できるようにする。
【解決手段】NCプログラムで工作機械を運転してNCプログラムによるサイクルタイムを測定するNC加工時間測定部33と、電子カムデータをもとに当該電子カムデータによるサイクルタイムを算出する電子カム加工時間算出部34と、NCプログラムによるサイクルタイムと電子カムデータによるサイクルタイムとを表示部30に同時に表示する表示制御部35とを備え、電子カムデータを用いて実際に工作機械を運転することなく、NCプログラムによるサイクルタイムからは予測が困難な電子カムデータによるサイクルタイムをオペレータが確認できるようにするとともに、電子カム化による時短効果も一見してオペレータが確認できるようにする。
(もっと読む)
5軸加工機の数値制御装置
【課題】最適な許容補正量を見つけることができる5軸加工機を制御する数値制御装置を提供すること。
【解決手段】数値制御装置が備える入力装置付き表示装置70の概略図である。キーボード73は数字キー、アルファベットキーなどを備えている。累積相対度数(%)を入力するためにプロンプト74が表示画面71に表示される。ファンクションキー72の「F5」に、工具方向指令の何パーセントを十分に補正したいかを作業者が設定する命令が割り当てられている。キーボード73の数字キーで入力した値はプロンプト74に表示され、F5を押して数値を設定することができる。また、ファンクションキー72の「F6」に度数分布のデータを外部装置(図示省略)に出力する命令が割り当てられ、F6を押して度数分布のデータを外部装置に送信することができる。
(もっと読む)
板材押さえ位置決定装置および決定プログラム
【課題】 レポジション動作時に、板材を安定的に押さえられる最適な押さえ位置を決定することができる装置およびプログラムを提供する。
【解決手段】 この板材押さえ位置決定装置1は、押さえ位置の複数の候補位置Pを順次指定する候補位置指定部5と、押さえの安定性を評価値として評価する評価部7とを有する。探索終了条件に達するまで候補位置の指定および評価を行わせ、最も評価値の高い候補位置を押さえ位置として決定し出力する押さえ位置決定部8を有する。
(もっと読む)
ロボットシステムに教示する方法
最初に、対象物モデルライブラリ及び作業モジュールライブラリを提供する。対象物モデルライブラリは、処理すべき実際の対象物に幾何学的に類似する少なくとも1つの対象物モデルを含む。作業モジュールライブラリは、行うべき各作業用の少なくとも1つの作業モジュールを含む。それから、処理すべき各実際の対象物に対して、対象物モデルライブラリにおける対象物モデルとの関連により、及び、対象物モデルの幾何学的パラメータの明細により、仮想対象物を定義付けする。その後、行うべき各作業に対して、作業モジュールライブラリから作業モジュールを選択すると共に、その作業パラメータを特定することにより、その操作を定義付けする。随意に、定義付けされた各仮想対象物に対して、その仮想対象物には、対応する実際の対象物を前もって撮像した少なくとも1つの二次元画像を関係づける。  (もっと読む)
(もっと読む)
プログラム作成支援方法、プログラム及びプログラム作成支援装置
【課題】プログラムを効率よく作成する。
【解決手段】プログラムを所定のブロックに分け、ブロック毎に命令文字列群であるブロック別文字列54と、所定の命令文字列である開始文字列と、終了文字列とを有するブロック別検索範囲53が記憶部50に格納されており、ロボット動作プログラム作成装置1が、処理の対象となっているブロック別文字列54において、ブロック別検索範囲の開始文字列と、終了文字列に挟まれた検索文字列を検出し、この検索文字列を強調表示して表示部14に表示させる。
(もっと読む)
移動体軌道生成方法および移動体軌道生成装置
【課題】移動体の動作軌道の自動生成方法として従来ポテンシャル法が用いられていたが、ローカルミニマムによって軌道生成不能となることがあった。
【解決手段】作業空間に障害物と移動体の初期位置と目標位置とを結ぶ動作軌道モデルを設定する。さらに、作業空間中に障害物を発生源とする斥力ベクトル場を設定する。この斥力ベクトル場を、動作軌道モデルを構成する質点に作用させて動作軌道モデルを変形させることにより、移動体の動作軌道を生成する。
(もっと読む)
複数のファンクションキーを有する数値制御装置
【課題】複数のアプリケーションソフトウェアのウィンドウを表示している場合、ウィンドウの配置やサイズの変化に応じて、汎用キーの押下情報を受取るウィンドウをダイナミックに切り替える。
【解決手段】画面レイアウト毎に汎用キー43がどのウィンドウの操作を行うかを定義した定義データを記憶する定義データファイル5と、前記画面レイアウトと前記定義データとの対応付けした画面リストファイル4と、表示される画面レイアウトの変更を監視し、変更があったときに画面レイアウトの定義データを定義データファイル5から選択して読み込むと共に、汎用キー43の押下を監視し、該定義データに基づいて指定されたウィンドウにファンクションキーが押下されたことを通知するキー入力監視ソフトウェア1とを有し、通知されたファンクションキーに応じて前記アプリケーションの操作が行われることを特徴とする複数のファンクションキーを有する数値制御装置。
(もっと読む)
加工パラメータ決定装置、加工パラメータ決定方法およびプログラム
【課題】少ない計算負荷によって、ツーリング剛性を確保し易い工具姿勢を決定するとともに、その工具姿勢において干渉の起こり難い加工領域を決定することができる5軸加工に関する加工パラメータ決定装置等を提供する。
【解決手段】多面体生成手段23は、被加工物(曲面)の形状データから多面体32を生成する。多面体情報算出手段24は、全ての多角形平面について、面積、法線ベクトル、平面ベクトルを算出する。第0姿勢設定手段25は、第0姿勢ベクトルを設定し、全ての多角形平面に対して、初期の姿勢適正値として、第0姿勢ベクトルとの内積によって算出する。姿勢・領域決定手段26は、第0姿勢よりも後の工具姿勢ベクトルを決定するとともに、決定した工具姿勢ベクトルによって加工する加工領域を決定する。領域調整手段27は、全ての多角形平面に対して、加工領域を調整する。
(もっと読む)
複腕ロボットの作業プログラム作成方法
【課題】教示作業者が意図した組み付け手順に基づいて複数マニピュレータの作業プログラムを生成することができ、また効率的に短時間で作業プログラムを生成することが可能となる複腕ロボットの作業プログラム作成方法を提供する。
【解決手段】複数の部品の3次元モデルを作成し、連結された複数の部品の各々につき、その部品を把持して操作するマニピュレータを複数のマニピュレータから選定し、組み付け作業において各部品が経由する各点の位置と、各経由点における各部品の姿勢を設定し、各経由点について、マニピュレータが到達する順に番号を割り当て、マニピュレータ毎に、経由点番号、操作する部品名、経由点位置および姿勢からなる経由点データリストを作成し、各経由点にてマニピュレータが実行する作業内容に応じて、作業マクロを組み合わせて複数のマニピュレータの作業プログラムを作成する。
(もっと読む)
ネスティング方法及び装置
【課題】ネスティング処理によってワーク上に配置した複数の部品間の間隔寸法を拡大して再配置するネスティング方法及び装置を提供する。
【解決手段】ネスティング装置1における表示手段13に表示されたシート状のワークWにおける板取可能領域45内に必要な複数の部品A,B,Cを配置した後、前記複数の部品A,B,Cを配置した部品配置領域47のX,Y方向の寸法と前記板取可能領域45のX,Y方向の寸法との寸法差ΔX,ΔYを求め、上記X,Y方向の寸法差ΔX,ΔYが予め設定してあるX,Y方向の所定寸法以上の場合に、前記寸法差ΔX,ΔYに基づいて前記各部品A,B,C間のX方向又はY方向の少なくとも一方向の間隔を拡大して前記各部品A,B,Cの配置位置を変更するものである。
(もっと読む)
先鋭な角度を形成し得る切削加工方法
【課題】回転する工具の切削によって加工面を形成する際、比較的簡単な制御によって加工面が湾曲せずに不連続状態であることによる先鋭な角度を形成しているコーナー部分を実現し得る構成を提供すること。
【解決手段】三次元造形対象物2に対する工具1の回転に伴う切削加工方法であって、一方の加工面21に沿って工具1が切削しながら特定のコーナー20に至るまで移動した後に、当該コーナー20から離脱して、前記一方の加工面21を延長した方向に移動した後、切削を伴わずに所定の規則に沿って移動したうえで前記コーナー20の位置に戻って突入し、当該突入する方向は前記コーナー20において前記一方の加工面21と交錯している他方の加工面22の交錯方向であって、前記突入以後、当該他方の加工面22に沿って切削を再現することにより、前記課題の解決を可能とするコーナー20において先鋭な角度を形成し得る切削加工方法。
(もっと読む)
部品プログラムの作成のための方法
【課題】工作機械のための部品プログラムの簡単な作成を可能にする。
【解決手段】部品プログラム21が制御命令を有し、制御命令に基づいて制御装置9によって工具16の運動が制御可能であり、工具の運動および加工工程に関する情報を含む運動情報22が読み込まれる部品プログラム21の作成方法に関する。制御装置9において特定の実行すべき加工工程のために制御サブプログラム11a,11bを指定する使用可能性情報23が読み込まれ、使用可能な制御サブプログラム11a,11bおよび運動情報22に基づいて、実行すべき加工工程のために当該加工工程に付属する制御サブプログラム11a,11bが使用可能である場合に、当該加工工程に付属する制御サブプログラム11a,11bの呼出しのための制御サブプログラム呼出し要求が制御命令として発生させられる。
(もっと読む)
エンドミル加工方法及びこれを用いた加工プログラム作成方法、加工プログラム作成装置
【課題】薄板状の被加工物をテーパエンドミルにより切削加工する場合、被加工物が切削時の負荷により発生するびびり振動を防止可能なエンドミル加工方法及びこれを用いた加工プログラム作成方法、加工プログラム作成装置を提供する。
【解決手段】テーパエンドミル工具1により薄板状被加工物Wを肩削り加工するエンドミル加工方法において、前記テーパエンドミル工具1のテーパ半角θ[度]に応じて、上向き削りの場合は次式(1)または(2)から、下向き削りの場合は次式(3)から算出される工具傾斜角度A[度]により加工する。
1.83θ-9.4≦A≦1.83θ-29.4 (θ≦7.87度)…(1), A=-5 (θ>7.87度)…(2), 2.10θ+6.1≦A≦2.10θ+26.1…(3) 但し、A:垂線より工具送り方向に対して逆方向に傾ける方向を正とする工具傾斜角度[度]
(もっと読む)
プログラミング装置
【課題】パラメータの設定値との関係で適切な指令値を含むNCプログラムを生成することができるプログラミング装置を提供する。
【解決手段】プログラミング装置1は、NC工作機械50の動作機構部52の作動制御に関連したパラメータを記憶するパラメータ記憶部53と、工具の移動位置及び加工条件に関するデータを含むCLデータを記憶するCLデータ記憶部14と、パラメータ記憶部53内のパラメータを参照して、CLデータ記憶部14内のCLデータからNCプログラムを生成するNCプログラム生成部31と、生成されたNCプログラムを記憶するNCプログラム記憶部32とを備え、NCプログラム生成部31は、パラメータを参照して、CLデータに含まれる加工条件データが適切であるか否かを確認し、適切でない場合には、パラメータを用いて加工条件データを修正し、加工条件データが修正されたCLデータに基づいてNCプログラムを生成する。
(もっと読む)
81 - 100 / 238
[ Back to top ]