
Fターム[3C269BB08]の内容
数値制御 (19,287) | 目的、目的を達成するための改良点 (2,252) | オペレータの操作性の向上 (584) | プログラム作成、変更時の操作 (357)
Fターム[3C269BB08]の下位に属するFターム
ティーチングの容易化 (119)
Fターム[3C269BB08]に分類される特許
21 - 40 / 238
NCプログラム作成装置
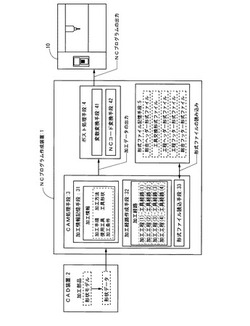
【課題】NCプログラムの作成において高いスキルの習得を必要とすることなくNC工作機械に最適化されたNCプログラムを容易に作成することが可能なNCプログラム作成装置を提供する。
【解決手段】CAD装置により作成される形状データからNC工作機械に出力するNCプログラムを作成するNCプログラム作成装置であって、形状データに対応する加工手順、加工方法、使用工具、工具形状、加工条件を含む加工情報を記憶する加工情報記憶手段と、NC工作機械の加工機軸数に対応して形状データから工具の加工経路を作成する動作及び被加工物に対する工具のアプローチ動作以外のNCプログラムの書式を形式化した形式ファイルを記憶する形式ファイル記憶手段と、形状データと加工情報とに基づいて加工経路を作成する加工経路作成手段と、加工経路の所定の形式ファイルを読み出してNCプログラムを作成する形式ファイル読込手段とを備えるようにした。
(もっと読む)
数値制御装置

【課題】傾斜面を指定する方法が簡潔となり、短時間でプログラム作成および加工が可能となるような数値制御装置を提供する。
【解決手段】数値制御装置は、第1の座標系からみた現在の第2の座標系の原点位置および姿勢を取得する手段と、座標系回転中心軸および該座標系回転中心軸まわりの回転角度を設定する手段と、現在の傾斜面に指定された第2の座標系を座標系回転中心軸まわりに回転角度だけ回転させた座標系の原点位置および姿勢を第1の座標系からみた新しい第2の座標系の原点位置および姿勢として設定し、第1の座標系からみた新しい第2の座標系の原点位置および姿勢を用いて、第2の座標系において指令された位置に対して姿勢の変換を含む座標変換を行って第1の座標系における位置を得る手段と、を備える。
(もっと読む)
衝突判定装置、衝突判定方法および衝突判定装置用プログラム
【課題】 過剰検出や衝突の見落としせずに正確な衝突判定を行うことのできる衝突判定装置提供すること。
【解決手段】 工具移動データ205から、指定の区間を特定区間の工具移動データ209として抽出する工具移動データ抽出部202と、特定区間の工具移動データ209と工作物形状データ208とホルダ形状データ207とを用いて、衝突の可能性があると判定した場合には衝突の発生が疑われる仮の衝突発生時点に対応する工具移動パラメータを算出する剛体間衝突判定部204と、特定区間の工具移動データ209と刃先形状データ206とを用いて、工作物形状データ208を変形する工作物形状変形部203とを備えている。剛体間衝突判定部204は、工作物形状変形の後、再度衝突の判定を行う。
(もっと読む)
ロボットシステム
【課題】動作プログラム内の命令を動作プログラムの変更履歴データを用いて修正する場合、従来はプログラム全体の全ての履歴を時系列に検索していくことになり、所望の変更履歴データを得るまでに多くの時間を要するという課題があった。
【解決手段】表示中の動作プログラムで命令を選択し、選択している命令に関する変更履歴を抽出して表示し、抽出された履歴情報のなかから所望の履歴情報を選択することで、選択している命令の内容を、所望の履歴情報に変更することにより、動作プログラムの変更に掛かる時間を少なくすることができる。
(もっと読む)
ロボット制御設定支援装置
【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
粗面加工システム及び粗面加工方法
【課題】所望の粗面を極めて効率良く加工することができる粗面加工システム及び粗面加工方法を提供すること。
【解決手段】本発明は、主形状加工用のNCデータが入力されるNCデータ入力部と、NCデータが分配処理されてモータ指令データが生成される分配処理部と、粗面加工用データが生成される粗面加工用データ生成部と、モータ指令データに粗面加工用データが加算されてモータ入力データが生成されるデータ加算部と、モータ入力データによって駆動されてワークと工具とを相対的に移動させるモータと、を備えたことを特徴とする粗面加工システムである。
(もっと読む)
工具経路作成方法及び工具経路作成装置
【課題】無駄な動作を少なくして加工効率を向上させることができる工具経路作成方法及び工具経路作成装置を提供すること。
【解決手段】工具経路作成方法では、加工領域の幅dが工具の加工半径rに対して、nr<d<2nr(n=1,2)に設定されている場合に、加工領域の輪郭から(2nr−d)/2の距離だけ外側に間隔を空けて輪郭線を設定する。設定された輪郭線のうち半径rの加工円が内接できない非接触部分を特定し、特定された非接触部分に対応して加工円が内接可能な曲線に形状変換する。形状変換された輪郭線に加工円が内接するように工具経路を作成する。
(もっと読む)
工具経路作成方法及び工具経路作成装置
【課題】加工姿勢の変更に対して無駄なく適切な加工条件で工具経路を作成できる工具経路作成方法及び工具経路作成装置を提供する。
【解決手段】所望の形状データに基づいて被加工物Mの加工姿勢を変更して除去加工する場合、加工姿勢を変更する直前の被加工物の加工に用いた工具T2により、加工姿勢で行った工具による全加工工程を仮想的に繰り返して仮想工具経路データP30、P31を作成し、仮想工具経路データに基づいて作成された加工形状データを用いて加工姿勢の変更後の工具経路データP32、P33を作成する。
(もっと読む)
多軸同期動作機械のプログラム変換モジュール及びプログラム変換方法
【課題】多軸同期動作機械のプログラム変換モジュール及びプログラム変換方法を提供する。
【解決手段】第1の機械と第2の機械との間でプログラムの変換を行うための多軸同期動作機械のプログラム変換モジュールであって、複数組の第1の機械の加工プログラム及びメカニズムデータが入力される第1の入力ユニットと、複数組の第2の機械のメカニズムデータが入力される第2の入力ユニットと、第1の機械のうちの少なくとも1つをソースマシンに設定するとともに、第2の機械のうちの1つをターゲットマシンに設定する設定ユニットと、ソース及びターゲットマシンのメカニズムデータに基づいて、運動学的方法を利用してソースマシンの加工プログラムをターゲットマシンに適用される加工プログラムに変換する変換ユニットと、を備える。これにより、複数台の異機種である多軸同期動作機械の間において加工プログラムの相互変換を行うことができる。
(もっと読む)
機械加工データの直接転送を用いた工作機械の制御方法及びシステム
【課題】データを工作機械制御のための別の形式または中間形式に翻訳する必要をなくす。
【解決手段】生成システム(204)からサーボ駆動機械装置の制御に用いるための制御システム(205)へ移動経路データ(310)を直接転送するための方法及びシステム。例えば、原材料を機械加工するための工作機械及びコンピュータ支援設計ソフトウェアパッケージ(301)を含むデータ生成システム。工作機械の工具部材を指向させるための工具経路は、CADソフトウェア(302)のオペレーションインターフェースを介して、CADソフトウェアによって開かれている設計ファイルから抽出される。これに代わって、設計ファイルは最終製品の幾何学的形状ではなく、移動経路を指定するのに使用されることが可能である。CADインタープリタアプリケーションは設計ファイルから移動経路データを抽出する。
(もっと読む)
ロボット制御装置、ロボットおよびロボット制御装置の教示方法
【課題】撮影動作の教示操作が煩雑になるのを抑制することが可能なロボット制御装置を提供する。
【解決手段】このロボットシステム100は、教示位置の入力と、少なくとも教示位置に対応付けられるコマンド情報の選択とを受け付けて教示位置とコマンド情報とを組み合わせた教示データを作成する教示装置3と、教示データに基づいて動作指令を生成する指令生成部24とを備え、教示装置3により選択されるコマンド情報は、教示位置と、予め設定された教示位置に基づく補助的な動作をロボットに動作させるための補助情報とに対応付けられたステレオ視コマンドを含む。
(もっと読む)
ロボット軌跡生成装置
【課題】ロボット軌跡生成装置を提供する。
【解決手段】疑似3次元空間を設定し、読み込んだ2次元データをこの3次元空間での特定の面に貼り付ける。この結果、3次元データが生成され、この3次元データに基づいてロボットのツール軌跡を生成する。2次元データが複数の面に跨る場合も、一筆書きでのロボットのツール軌跡を生成する。
(もっと読む)
数値制御工作機械
【課題】テーブル上に治具等を介して取り付けられたワークの実際の三次元の状態を迅速に計測することができる数値制御工作機械を提供する。
【解決手段】工具101の長さ及び径を計測する工具計測センサ104と、ワーク1の三次元的な形状と位置及び向きとをレーザ光等により非接触で計測するワーク計測センサ105と、ワーク計測センサ105からの情報に基づいて、加工開始点の位置及び基準面の傾きを求めた後、入力されている加工プログラムに基づいて、センサ104,105からの情報並びに前記加工開始点の位置及び前記基準面の傾きから、ワーク1に対する加工を目的とする最終形状までシミュレーションで行うことにより、規定値以上の加工負荷の有無及び前記ワークに対する取り残しの有無を求め、求められた結果を表示装置112で表示させる制御装置106とを備える数値制御工作機械100とした。
(もっと読む)
溶接教示プログラムの変更方法およびロボット制御装置
【課題】溶接開始位置を示す命令から溶接終了を示す命令までの区間で定義されるプログラムブロックを複数記憶する教示プログラムの修正作業時、本来修正を望むプログラムブロックを一度の操作で一括して修正できないため、修正に時間がかかり、生産開始までに時間を要し、あるいは修正抜けが生じることで溶接作業が改善されず生産性が思うように上がらないという課題があった。
【解決手段】教示プログラムにおいて複数のプログラムブロックを定義し、各プログラムブロックに識別子を付与し、本来修正を望むプログラムブロックについて同じ識別子を記憶したプログラムブロックを特定し、同じ識別子を記憶したプログラムブロックについて一括してプログラム内容を修正する。
(もっと読む)
プログラム作成支援システム、及び、そのコンピュータプログラム
【課題】複数の駆動手段によって駆動されるロボット装置用の駆動プログラムの作成を容易にすることができるプログラム作成支援システムを提供する。
【解決手段】プログラム作成支援システム1は、各サーボ5の接続構成を設定するための設定画面SGを表示する表示装置4と、所定の情報を記憶する制御ユニット3と、を備えている。そして、プログラム作成支援システム1は、仮想3次元空間に配置するための各サーボ5にそれぞれ対応するオブジェクトSOを生成し、設定画面SGにて設定された接続構成となるように各オブジェクトSOを配置した仮想3次元空間に基づいて2次元画像を生成し、当該2次元画像を前記設定画面SG上に表示させるものである。更に、設定画面SGに含まれる動作設定領域DSにて接続構成が設定された各サーボ5のそれぞれの動作に対応する駆動信号を生成し、各サーボ5に出力するものである。
(もっと読む)
教示データの修正システム
【課題】加工ワークの形状が変化する場合に簡易に教示データの修正が行える教示データの修正システムの提供。
【解決手段】教示点を修正する教示データの修正システムにおいて、第一の加工ワーク13を加工するための教示点に関するパラメータを記憶する記憶手段と、第一の加工ワークとは形状の異なる第二の加工ワーク14に関する画像と教示点の画像とを重ね合わせて表示をするとともに、ポインティング手段で表示画面中の位置を指定できる表示手段と、ポインティング手段で教示点に関するパラメータが変更された際に、ポインティング手段で示される表示画面中の位置と変更前の教示点の位置とに基づいて、変更後の変更教示点に関するパラメータを算出する算出手段と、記憶されたパラメータを、変更後の変更教示点に関するパラメータにより更新する更新手段と、更新後の変更教示点と第二の加工ワークに関する画像とを重ね合わせて表示させる制御手段と、を具備する。
(もっと読む)
加工シミュレーション装置及び方法
【課題】切削加工シミュレーションにおいて、加工傷の発生状況とその発生メカニズムとに関する定量的な分析を支援する各種の特性量をより直感的に把握できる加工シミュレーション装置及び方法を得ること。
【解決手段】工具の種別及び形状を示す工具データ6及び工具の移動軌跡を示す工具移動軌跡データ7に基づいて切削加工をシミュレートして被加工物の形状を示す被加工物形状データ8を生成する切削形状処理部2と、切削加工の過程における被加工物の加工面上の着目点について、着目点の創成に関与した特性量を、被加工物形状データ8、工具データ6及び工具移動軌跡データ7に基づいて算出する工具移動特性量算出部4と、被加工物形状データ8に基づいて生成された、予め定められた視線方向に沿った被加工物の投影イメージに、特性量を重畳してディスプレイデバイス9に表示させる切削形状表示部3とを有する。
(もっと読む)
穴あけ加工制御方法および穴あけ加工装置
【課題】異なる材質の材料により形成されていることで区分される複数の形成領域を有するワークに穴を形成するために、穴が形成される2以上の加工対象層をドリルに作用する負荷トルクに基づいて自動的に判別可能とすると共に、加工対象層毎に設定された加工条件での穴あけ加工の容易化および加工効率の向上を図る。
【解決手段】異なる材質の材料で区分される形成層51〜56を有するワーク50に穴70を形成する穴あけ加工装置において、加工対象層判定手段は、穴あけ加工の開始とドリル4に作用する負荷トルクの変化とに基づいて加工対象層51a〜56aを穴あけ加工の順に判定し、加工条件決定手段は、各加工対象層51a〜56aの形成材料に対応した設定加工回転速度および設定加工前進速度を決定し、駆動制御手段は、ドリル4が設定加工回転速度および設定加工前進速度で穴70を形成するように、主軸モータおよび送りモータを制御する。
(もっと読む)
梱包用受け型の作製方法
【課題】搬送時の振動や衝撃による力が被搬送物の表面に均等に加わるようにすることができる梱包用受け型を作製する方法を提供する。
【解決手段】非接触レーザースキャナ2を用いて被搬送物である彫像の外形データを取得するスキャニング工程と、上記彫像の外形データを用いて等身大の雌型データを作成するデータ作成工程と、上記雌型データを数値制御工作機械に与えて発泡スチロールなどの緩衝体を加工して上記梱包用受け型を作製する受け型作製工程と、を行う。
(もっと読む)
ロボットの角度データ変換方法及びこの方法を実施するための制御装置
【課題】ロボット交換時におけるデータ設定の誤りを防ぐ。
【解決手段】交換前のロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換前ロボットの幾何学的誤差データを制御装置の主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換前ロボットのID情報とを照合し(S101)、次にロボットを制御装置から外して交換し(S102)、交換後ロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換後ロボットの幾何学的誤差データを主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換後ロボットのID情報とを照合し(S103)、交換前及び交換後のロボットの幾何学的誤差データを反映したツール先端位置間の誤差が十分小さくなるように動作プログラムに含まれる角度データを変換し、変換された角度データを含むように動作プログラムを上書き保存する(S104)、工程を備える。
(もっと読む)
21 - 40 / 238
[ Back to top ]