
Fターム[3C269BB17]の内容
数値制御 (19,287) | 目的、目的を達成するための改良点 (2,252) | その他の目的 (87)
Fターム[3C269BB17]に分類される特許
61 - 80 / 87
加工機械の消費エネルギー表示装置

【課題】加工機械において、消費エネルギー量を効率よく削減できるようにする。
【解決手段】消費エネルギー表示装置は、複数の動作でワークを加工する加工機械の表示装置であって、エネルギー量算出部42と、表示部20aと、を備えている。エネルギー量算出部42は、動作毎に設定された単位時間当たりのエネルギー消費量と動作をしている時間とに基づいて各動作の消費エネルギー量を算出する。表示部20aは、算出されたエネルギー量を動作毎に表示する。
(もっと読む)
工具データを準備し処理し保守するための方法

【課題】工具データセットの準備、処理、保守において、汎用的に使用できるようにし、さらに工具データセットの可変かつ自動的なメンテナンスを実現する。
【解決手段】NC制御装置とは独立した工具データマネージメントモジュールが電子データ処理装置の記憶装置に格納され、このモジュールは使用すべき工具ごとにそれぞれスタティックなデータとダイナミックなデータのためのロケーションを有する。工具データマネージメントモジュールは処理プロセスに関する別個のリストデータセットを有し、所属の工具データセットに対する参照指示がこのリストデータセットに含まれている。必要とされるリストデータセットが所属のデータセットとともに、NCデータ処理装置におけるプロセス処理部に伝送されて記憶され、工具データセットのうち少なくともダイナミックなデータが現在のNC加工プロセスに従い更新される。
(もっと読む)
機械のエネルギー消費を削減するための装置及び方法
【課題】自動化技術の領域の機械で用いられることのできる、機械のエネルギー消費を削減するための装置及び方法、並びにより少ないエネルギー消費の機械を提供する。
【解決手段】機械のエネルギー消費を削減するための装置(100)は作動停止装置(104)と監視装置(106)とを備えている。作動停止装置(104)は、予め定められた作動停止事象に応答して作動停止信号を準備するように構成される。監視装置(106)は、作動停止信号に応答して、機械(102)を予め定められた作動停止規則に従ってエネルギー節約モードへ移行させるように構成される。
(もっと読む)
工作機械の制振システム
【課題】 共振周波数を加工前に予測して加工条件の変更を伴うこと無く振動の抑制を可能とし、更に加工による被加工物の形状変化を演算して共振周波数の変化を予測し、制振作用を継続して発揮できる工作機械の制振システムを提供する。
【解決手段】 NCプログラム生成手段18と、NCプログラムにより加工される被加工物のモデルデータを演算する形状演算手段19と、演算されたモデルデータに基づき被加工物の工具方向の共振周波数と振動量を数値解析する振動解析手段20と、NCプログラム生成手段18、形状演算手段19、振動解析手段20の出力した情報を関連させて記憶する演算情報記憶手段21と、共振周波数を任意に変更可能な動吸振器8と、動吸振器の制御を行う制御手段22とを備え、制御手段22が演算情報記憶手段21に記憶された情報に基づいて動吸振器8を制御し、共振周波数を変更制御する。
(もっと読む)
ロボットシステム
【課題】大サイズのワークを複数のロボットによって支持しても、所望の作業軌跡に沿った加工作業を行うことができるロボットシステムを提供にする。
【解決手段】ワークを工具で加工する加工装置と、加工制御装置と、ワーク把持用ハンドを備えた複数のロボットと、加工制御装置および複数ロボットを制御するロボット制御装置とを備え、複数ロボットによってワークを移動させながら工具でワーク上の目標加工線に沿って加工を行うロボットシステムにおいて、ハンド先端を原点とするツール座標系における目標加工線に対応する基準点の移動軌跡を演算周期毎に求め、第1ロボットのハンド先端位置を演算して、第1ロボットのハンド先端位置をその位置へ移動させ、第2ロボットのハンド先端位置が第1ロボットのハンド先端位置と相対的な位置関係を一定に保って工具の軌跡が目標加工線と一致するようにワークを工具に対して移動させるようにした。
(もっと読む)
転置機能付きネスティング装置
【課題】 ネスティング時に、板材搬送装置の板材保持具の位置まで定める処理を行う場合にも、切り取る部品の配置方向の転置が行えて、歩留りの向上を図ることができるネスティング装置を提供する。
【解決手段】 一つの部品形状データD1につき、基本の方向で部品Mの図形Gに対して板材保持具35の位置を割り付けた基本方向情報付加部品データD2aと、角度変更した部品の図形G′に対し板材保持具35の位置を割り付けた転置方向情報付加部品データD2bとを、情報付加部品データ生成手段6で作成する。ネスティング手段10は、基本方向情報付加部品データD2aを用いたネスティングと、転置方向情報付加部品データD2bを用いたネスティングとを行う。
(もっと読む)
機械可動部の加減速制御方法
【課題】1つの移動指令での移動中において、モータの位置に応じて加速度を変更して加減速制御できる加減速制御方法を得る。
【解決手段】移動指令による目標位置までの移動中のモータの位置(0〜P(0)、P(0)〜P(1)、P(1)以上)に対応する加速度(a(0)、a(1)、a(2))を加速度パターンとして予め制御装置に設定しておく。モータ駆動中、前記加速度パターンに基づいて、モータの位置に応じて加速度を変更し加減速制御して速度を制御する。
(もっと読む)
壁面用部品の板取り装置と壁面用部品の板取りプログラムと記録媒体とプレカット装置
【課題】建物の対象壁面に、板状の複数の部品を隙間無く配列するとき、歩留まりを良くし、かつ、施工費も抑制する。
【解決手段】 該当する対象壁面を分割線で複数の領域に分割する。そのいずれかの分割線を無効にし、もしくは、いずれかの前記領域をさらに分割して、全ての領域を原板から切り出すことができる形状にする。一枚の原板から切り出すことができる部品または部品の組を選択して、各原板上に選択した部品を板取りする。(施工コストK=原板数M×原板の単価+部品数N×施工単価)とする演算処理を実行する。分割線の位置と板取りの組み合わせを変更して、施工コストKが最小値を示すときの部品の形状と最適板取りを求める。その最適板取りに基づいて、全ての部品をプレカットするためのプレカットデータを生成する。
(もっと読む)
数値制御装置および数値制御方法
【課題】断続的な工具の姿勢変更の指令がある場合や工具の姿勢変化量が不連続な指令がある場合においても、加工プログラムの指令点を変更することなく、工具の先端を滑らかに動作させながら加工を行わせること。
【解決手段】回転軸フィルタ処理部5は、工作機械のパラメータ等にて予め与えられたフィルタ時定数に従って、回転軸の回転角度の補間点13間の角度変化量に対して移動平均フィルタをかけることで、補間点13間の角度変化量を平滑化し、並進軸タイミング合わせ部6は、並進軸の工具先端位置の補間点14間の移動量に対して移動平均フィルタをかけることで、平滑化処理された回転軸の回転と並進軸の移動のタイミングを合致させ、座標変換部7は、並進軸のタイミング合わせ後の工具先端位置16と回転軸のフィルタ後の回転角度15から、工作機械の構成に応じて並進軸の機械位置17へ座標変換する。
(もっと読む)
多用途ロボット制御システム
【課題】商業標準のコンピュータシステムを利用し、異なるロボットに対応できるロボット制御システムを提供すること。
【解決手段】改良型の多用途ロボット制御システム10は、汎用オペレーティングシステムを有する汎用コンピュータ14を備える。この汎用コンピュータ14は、ロボット命令24のプログラム処理を選択的に開始および停止し、複数のロボット動作コマンド26を生成するプログラム実行モジュール18を含む。リアルタイムコンピュータサブシステムは、動作コマンドデータバッファ34と、動作を順次処理しロボットの機械ジョイントに必要な位置を計算するデータバッファ34にリンクされたロボット動作モジュール32と、動作モジュール32とソフトウェア的に通信する、ロボットのジョイント位置フィードバック信号44/46から必要なアクチュエータ活動化信号50/52を繰り返し計算する動的な制御アルゴリズム38とを含む。
(もっと読む)
工作機械の電源制御装置
【課題】工場機械の移転や転売等による移設を確実に検知し、その旨を操作者に報知する。
【解決手段】工作機械1に給電する工場電源電圧の喪失時に、電源制御装置に設けた電源監視部40のコンデンサ45により所定期間、第2リレー42の通電を保持し、工場電源電圧の喪失後、所定期間が経過した場合に、第2リレー42により対応する経過痕跡を記録し、次回電源投入時に電源遮断信号としてCPU31に出力する。これにより、RAM33の記憶データを読み取り、経過痕跡を検出した場合に、その旨を操作者に報知することが可能となる。
(もっと読む)
圧力制御と位置制御とを切り換える機能を有する数値制御装置
【課題】圧力制御から位置制御への切り換え時に速度指令値が不連続にならないようにし、切り換え時の機械的ショックが発生することを防止することが可能な圧力制御と位置制御とを切り換える機能を有する数値制御装置を目的とする。
【解決手段】圧力制御から位置制御への切り換えを外部からの指示により行うか、あるいは、切り換え条件に応じて自動的に切り換える機能を有する、圧力制御と位置制御とを切り換えて動作するサーボ制御部20を備えた数値制御装置5において、圧力制御中は、制御軸の現在の実速度に対応するサーボ位置偏差量を前記サーボ制御部20に設定するサーボ位置偏差量設定部15と、圧力制御から位置制御に切り換わった後には、予め設定してある加減速時定数に従って減速停止するのに必要なパルスを加減速処理部14aへ出力するパルス出力部16とを備えた圧力制御と位置制御とを切り換える機能を有する数値制御装置。
(もっと読む)
数値制御装置
【課題】消費電力を低減することができ、また装置全体での省エネルギ化や発熱の抑制を現実的に実現することができる工作機械の数値制御装置を提供する。
【解決手段】信号用電源2と、一方側を信号用電源2に接続するとともに他方側を接地電位に接続し、操作スイッチの操作に対応した操作信号を生成するスイッチSWと、信号用電源2からスイッチSWへの通電を実質的に行う通電時間区分と、信号用電源2からスイッチSWへの通電を実質的に停止する非通電時間区分とを設定し、各区分に対応した通電処理を行う制御回路10、トランジスタTR及び負荷抵抗Rとを有する。
(もっと読む)
地震情報により工作機械を停止する機能を有する数値制御装置
【課題】地震情報を利用してワークを切削しないブロックでプログラム運転停止や工具の退避を行うことが可能な数値制御装置を提供すること。
【解決手段】数値制御装置1は、地震情報Sigを受信する地震情報受信部A、地震発生の予測時刻での予測実行ブロックを特定する実行ブロック予測部B、地震情報Sigを受信した時に実行中のブロックから予測実行ブロックまでの間に、主軸が停止、あるいは、早送りで工具あるいはワークが移動する運転停止ブロックを特定する運転停止ブロック特定部C、運転停止ブロックの実行開始から実行終了時までの間でプログラム運転の停止を行うプログラム運転停止制御部D、前記プログラム運転停止制御部Dによりプログラム運転が停止した場合、前記工具または前記ワークを退避する退避制御部Eと、の機能を備えている。
(もっと読む)
材料取り合わせシステム
【課題】ファーストフィット法で割り付けをしたときに、最後のほうにしわ寄せがくるのを改善して、材料取り合わせの最適化を図る。
【解決手段】材料を一つずつ選択して、割り付け可能な製品を組み合わせて最適な割り付けを見つけ、仮割り付けとする。この処理に特殊な再起型アルゴリズムを採用する。材料を替えて同じ処理を繰り返す。複数の仮割り付け結果を比較して、歩留まりの良いものを製品の割り付けデータに採用する。これを繰り返しながら、あと2回で終了するタイミングを検出する。あと2回分は、複数の割り付けパターン候補を取得して比較し、使用材料長の総和が最小の割り付けパターンを採用する。
(もっと読む)
移設防止機能を有する数値制御装置及び移設防止システム
【課題】機械が設置された場所からの移動距離を測定するGPS技術を用い機械の移設防止機能を有する数値制御装置を提供すること。
【解決手段】[ステップA1]GPSにより数値制御装置1の位置を検出。[ステップA2]予め設定された機械の設置位置及び許容できる移動距離の情報を記憶手段からの読み出す。[ステップA3]GPSで求めた検出位置と設置位置とから移動距離を算出。[ステップA4]ステップA3で求められた移動距離がステップA2で読み出した許容できる移動距離内か否かを判断し、以内の場合ステップA5に移行し、許容できる移動距離でない場合ステップA6に移行する。[ステップA5]数値制御装置1が通常実行する動作(加工プログラムの解析処理など)を実行し終了する。[ステップA6]数値制御装置の機能を停止する処理を実行し、ステップA7へ移行する。[ステップA7]稼働禁止フラグFを1にセットし終了する。
(もっと読む)
工作機械およびその切削加工方法
【課題】 工具の摩耗を生じる箇所を分散させて、工具寿命を向上させることのできる工作機械および切削加工方法を提供する。
【解決手段】 工作機械本体1と制御装置2とを備える。前記制御装置2は、総切り込み量の入力値分の加工を、複数回のパスで切削するにつき、各パス毎に互いに異なる切り込み量となるように、各パス毎の切り込み量を設定規則27に従って演算する切り込み量演算手段26を備える。この演算された切り込み量で工作機械本体1を制御する演算制御部24を有する。
(もっと読む)
関節連結されたコンピューター生成キャラクターからアニマトロニクスユニットを設計するための方法および装置
アニマトロニクスユニットに対する設計を特定する方法は、芸術的に決定された動きを含む動きのデータを受信することと、動きのデータに応答してアニマトロニクスユニットの少なくとも一部分の構成に対する設計を決定することと、アニマトロニクスユニットの構成に対する設計を出力することとを包含する。一実施形態において、アニマトロニクスユニットの挙動を決定する方法は、複数の制御信号を用いてアニマトロニクスユニットの少なくとも一部分のソフトウェアシミュレーションを駆動することによって、複数の制御信号に応答してアニマトロニクスユニットの少なくとも一部分の該挙動を推定することを包含する。  (もっと読む)
(もっと読む)
翼構造体及び翼構造体のリブを製造する方法
翼構造体は、1対の対向する桁要素16、18によって結合されかつ相互に離間される第一及び第二の対向する外板要素12、14を備える。外板要素12、14はそれぞれの外面輪郭及び内面輪郭を有する。外板要素及び桁要素は囲繞空間22を形成し、囲繞空間内部にリブが配列される。リブ24はリブ本体30及び複数のリブ足32を備える。リブ足32は脚部34及びリブ足板36を備える。リブ足板36は、これが当接して配列される外板要素の内面輪郭に合致するようにその寸法、位置及び角度を定められる。 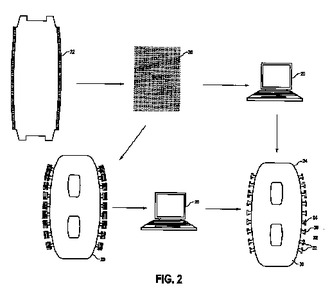 (もっと読む)
(もっと読む)
ロボット制御装置
【課題】教示操作盤を無線接続で使用する際に、利便性を損なうことなく、消費電力を抑えることにより、教示操作盤のバッテリ寿命を延ばすことができるロボット制御装置を提供する。
【解決手段】制御装置本体と、ロボットの位置及び姿勢を教示するために用いられる教示操作盤5とを備えたロボット制御装置において、教示操作盤5は、グラフィック表示機能と、グラフィック表示機能が有効な第1動作モードと、グラフィック表示機能が無効な第2動作モードと、を有し、教示操作盤5がロボット制御装置本体とケーブルで電気的に接続されているときは第1動作モードに設定し、教示操作盤5がロボット制御装置本体とケーブルで電気的に接続されていないときは第2動作モードに設定する動作モード切替え手段を備えた。
(もっと読む)
61 - 80 / 87
[ Back to top ]