
Fターム[3C269MN32]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | 各種オンオフ信号の監視 (68)
Fターム[3C269MN32]に分類される特許
21 - 40 / 68
ロボットシステム
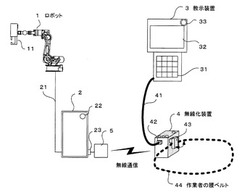
【課題】有線型の教示装置を引き続き使用しつつ無線通信機能を実現して導入コストを抑制できるとともに、ケーブルの取り回しの煩雑さを解消し、なおかつ作業者に無線化に伴う負担を強いることがないロボットシステムを提供する。
【解決手段】
ロボット1と、ロボット1の教示や操作に用いる教示装置3と、ロボット1および教示装置3と接続されてロボット1を制御するロボット制御装置2とを備え、教示装置3は、教示装置3とは別体であって、ケーブル41を通じて教示装置3に接続される無線化装置4を介してロボット制御装置2との間で無線通信を行う。
(もっと読む)
電子カム制御装置

【課題】規定されたカムストローク範囲から外れて停止した駆動軸を容易に同期運転再開位置まで復帰させることができる電子カム制御装置を得ること。
【解決手段】入力軸を含む駆動軸としてのモータ54a〜54nに対応する駆動制御装置53a〜53nに、入力軸の一回転を分割したカム角度に対応するカムストローク位置を規定する電子カム指令プロファイルに基づいた制御を実行させ、複数の駆動軸を同期制御する電子カム制御装置52は、電子カム指令プロファイルで規定されたカムストローク範囲から外れて停止している駆動軸の停止中の入力軸のカム角度に対応するカムストローク位置を、電子カム指令プロファイルに再適合させる電子カム同期位置として算出する手段と、駆動軸を予め設定された速度で電子カム同期位置へ移動させる移動手段と、駆動軸の電子カム同期への移動が完了したことを上位システム51へ通知する手段とを有する。
(もっと読む)
工作機械の運転機能制御装置
【課題】工作機械を運転する際の省エネルギーおよび安全の向上に貢献するものであり、使用者が、エネルギーおよび安全に関して最適化されるように単純な方法で異なる運転モードでの工作機械の運転を計画することができる装置を提供する。
【解決手段】主電源をスイッチオンまたはスイッチオフする装置2と、選択可能な基準に従って工作機械の運転機能のスイッチオフ時間を決定する少なくとも1つの装置3とからなる工作機械の運転機能制御装置を提供する。
(もっと読む)
ロボット制御装置およびロボット制御装置の制御方法
【課題】待機時のアーム等の落下を防止しつつ待機時の産業用ロボットの消費電力を低減することが可能で、かつ、産業用ロボットのスループットを向上させることが可能なロボット制御装置を提供する。
【解決手段】ロボット制御装置15は、産業用ロボットを駆動するためのモータ17と、モータ17を制動するための制動手段18と、モータ17を駆動するモータ駆動手段20と、モータ駆動手段20に電力を供給する電力供給手段21と、制動手段18、モータ駆動手段20および電力供給手段21を制御する制御手段22とを備えている。制御手段22は、制動手段18を作動させてモータ17を停止させるとともに、制動手段18の作動中に電力供給手段21を制御してモータ駆動手段20に電力を供給しながらモータ駆動手段20を制御してモータ17への電流の供給を停止する。
(もっと読む)
誤動作を防止する機能を備えた数値制御装置
【課題】工作機械において、座標系の変更による、加工不良、機械干渉を防止し、および加工不良、機械干渉の発生時の原因究明に要する時間を短縮することが可能な誤動作を防止する機能を備えた数値制御装置を提供すること。
【解決手段】機械の基準となる第一の座標系と所定の位置関係に設定された第二の座標系でプログラムする機械を制御する数値制御装置10において、前記第一の座標系と第二の座標系の位置関係を確立した後に座標系が変更されたか否かを監視する座標系変更監視手段16と、座標系変更監視手段16によって座標系の変更が行われたと判断された場合に、前記機械の運転の停止(アラーム発生手段19)あるいは警告表示(ワーニング表示手段20)の少なくともいずれか一つの処理を実行する手段と、を有することを特徴とする誤動作防止機能を備えた数値制御装置。
(もっと読む)
動作入力装置
【課題】 イネーブルスイッチを操作しながら、他の入力操作を行うことができる動作入力装置の提供
【解決手段】 ティーチング装置1は、把持部11及び操作部13を有している。使用者は、ティーチング装置1を使用する際に、把持部11を掌及び第二指〜第五指を用いて把持する。操作部13は、把持部11を使用者が把持したときの第二指側に、把持部11に続いて配置されている。把持部11は、イネーブルスイッチ111を有している。使用者は、第二指〜第五指を用いてイネーブルスイッチ111を操作する。入力部131は、操作部13において把持部11が配置されている側とは反対側に位置する面P13に配置されている。これにより、把持部11を掌及び第二指〜第五指で把持しながら、入力部131への第一指による操作が可能となる。なお、入力部131は、タッチパッド133、液晶ディスプレイ135及び表示制御部137により構成されている。
(もっと読む)
NC工作機械における全駆動モーターに対する電力の供給及び切断制御方法
【課題】NC工作機械制御において、非常時用に電力の供給を生産するスイッチの存在に着目し、当該スイッチを全作動工程の終了段階においても、有効に活用すること。
【解決手段】NC工作機械において、工作及び搬送に関与している全駆動モーターに対し、専ら電力の供給及び切断を行うスイッチを設けずに、全駆動モーターに対し非常時に際し電源からの電力の供給を切断し、非常時以外の段階では電源からの電力を供給している非常時用スイッチに対し、中央コントローラーがNC工作機械の全作動行程が終了した段階において、全駆動モーターに対する電力供給の切断指令を伝達することによることにより、前記課題を達成し得る電力の供給及び切断制御方法。
(もっと読む)
ロボット制御システム
【課題】
操作者がコントローラに設けられた第1接続確認操作手段を操作すると、コントローラの第1表示手段と、可搬式操作部に設けられた第2表示手段が同時に第1接続確認操作手段が操作される前の第1表示状態から第2表示状態に変化するため、操作者が把持している乾式操作部とコントローラの接続関係の誤認識を確実に防止できるロボット制御システムを提供する。
【解決手段】
コントローラ20AとTP10と通信接続が完了した後、コントローラ20Aが教示モードに設定されている際に、操作者がコントローラ20Aに設けられた運転準備ボタン58aを押すと、運転準備ボタン58aの運転準備ボタン表示灯63と、TP10の非常停止ボタン表示灯141aが同時に消灯から点滅パターンに変わるので、操作者が把持しているTP10とコントローラ20Aの接続関係の誤認識を確実に防止できる。
(もっと読む)
加工装置
【課題】加工工具の折損を自動検出でき、加工後の加工工具に折損がない場合、従来のように操作者により起動ボタンを押下する必要をなくして作業効率を向上させる。
【解決手段】昇降する加工工具5を検出する工具検出スイッチ3をテーブル1上に設けると共に、この工具検出スイッチ3がオンすることでオン、オフ信号を出力するスイッチ回路を有する自動起動操作ボックス11を設け、1加工工具による加工終了後、テーブル1の移動により工具検出スイッチ3を検出位置に位置づけて加工工具5を下降させ、その際工具検出スイッチ3が押下されたか否かにより加工工具5が折損しているか否かを判断すると共に、加工工具5が折損していないことで工具検出スイッチ3が押下されることにより前記スイッチ回路からオン、オフ信号が出力された場合、前記起動スイッチ17のオン、オフが行われなくとも自動的に次の加工に移るように制御する。
(もっと読む)
ロボット制御システムにおける通信接続方法及びロボット制御システム
【課題】
コントローラによるロボットの運転状態が再生モードである場合、可搬式操作装置のコントローラに対する通信接続を、生産に影響することなく円滑に行うことができるロボット制御システムにおける通信接続方法を提供する。
【解決手段】
ロボット制御システム100における通信接続方法は、TP10から、ネットワークを介してコントローラ30に通信のログイン要求(接続要求)があった場合、TP10に設けられたログイン処理部18が、非常停止スイッチ12の操作状態、及び、コントローラ30のモード状態を取得して、非常停止スイッチ12の操作状態が非常停止状態で、かつ、モード状態が再生モードのときは、通信の接続要求後のコントローラ30に対する通信接続を認めず、そうでない場合には、通信接続を認可する。
(もっと読む)
数値制御装置
【課題】一時的に記憶していた各ステージの位置情報が失われても、移動対象物同士が衝突することなく、各ステージを原点位置に復帰させる。
【解決手段】XYステージ103にワークWを保持したワーク保持具101が支持されている。XYステージ103は、回転ステージ105に支持されている。一方、測定器117が回動する測定器ステージ115に支持されている。数値制御装置は、ワークW及びワーク保持具101と測定器117との相対的な位置関係を保持した状態で同一方向に回動させ、いずれか一方が回動端で検出された後、反対方向に回動させる。反対方向に回動させる際には、回動量を検出しておく。この動作によりワークW及びワーク保持具101と測定器117との相対的な位置関係を判別する。そして、この判別した位置関係に対応する予め記憶している初期化パターンに従って、XYステージ103を原点位置に復帰させる。
(もっと読む)
複数のセンサの信号に基づいて機械の異常判定を行う機能を備えた数値制御装置
【課題】数値制御装置の内部情報と複数のセンサ信号とを用い、より確実に機械の異常を判定することが可能な異常判定を行う機能を備えた数値制御装置を提供すること。
【解決手段】機械30の各部に配置された複数のセンサにより検知された振動センサからの信号、温度センサからの信号、および湿度センサからの信号は、センサ信号受信回路24に入力すし、AD変換回路23によりアナログ信号をデジタル信号に変換後、ピークホールド回路22、通信回路21を介して数値制御装置10に入力する。数値制御装置10のマイクロプロセッサ14は、複数のセンサ情報(振動情報、温度情報、湿度情報)と、数値制御装置内部情報15aを取り込み、異常判定処理、異常通知処理、異常状態を数値制御装置10が備えた表示装置に表示したり、機械30を停止するためのラダー出力や、異常状態の判断結果を数値制御装置10のメモリに格納する処理を行う。
(もっと読む)
数値制御装置、数値制御方法及び数値制御プログラム
【課題】動作完了信号の受信を必要とする補助指令において、追加の機能を必要とせず、読み込んだブロックにおいて動作完了信号を待機することなく、加工プログラムの実行時間を短縮し、加工時間を短縮することのできる数値制御装置を得ること。
【解決手段】Mコードと、指令に関する情報として定めたMコード完了待ち条件と、が対応付けられているMコード完了待ちテーブルを記憶する記憶部127と、実行される加工プログラムから検出されたMコードの次の指令による実行結果が、Mコード完了待ち条件に合致するか否かを判断する完了待ち判断部116と、実行結果が、Mコード完了待ち条件に合致しない場合に、順次、次の指令の実行要求を行い、実行結果がMコード完了待ち条件に合致する場合は、順次、次の指令の実行要求を行わずに動作完了信号の受信を待機する指令実行部117と、を備えた。
(もっと読む)
無線教示操作盤およびロボット制御システム
【課題】教示操作盤の非常停止機能が有効か無効かを容易に認識可能とする。
【解決手段】可搬式の教示操作盤20とロボット制御装置との間で無線通信手段を介して通信することにより、教示操作盤20からの指令に応じてロボットを制御する。教示操作盤20は、教示操作盤本体30と、教示操作盤対して着脱可能に設けられロボットへの非常停止指令が入力される非常停止入力部31と、から構成される。非常停止入力部31が取り外された状態では、非常停止回路35が常開になり、この状態では、非常停止入力部31の操作による非常停止機能を無効化し、常に非常停止信号を出力する。これにより作業者は教示操作盤20が有する非常停止機能が有効か無効かを非常停止入力部31の着脱に応じて容易に判断することができる。また着脱検出部26により非常停止入力部31の取り付けを検出し、非常停止入力部31が取り外しされたときのみ無線通信を遮断可能とする。
(もっと読む)
機械制御装置
【課題】
単一の故障で機械の非常停止動作の安全機能が損なわれることのないように多重化されたハードウエア回路と最小限の通信回路を有しながら信頼性を確保した通信プロトコルによって信頼性の高い非常停止通信を行うことができる機械制御装置を提供する。
【解決手段】
一対のCPU12,13中の1つのCPUが非常停止スイッチ11の複数接点に関する全モニタ結果を含む通信パケットを生成し、単一の送信回路は送信する。ロボット制御装置の一対のCPU22,23は送信された通信パケットの通信エラー検出データを解析し、モニタ結果及び通信エラー検出データの解析結果に応じて第1、第2電磁接触器制御回路にOFFの制御信号を出力し、モータM41の電力を遮断する。
(もっと読む)
工作機械に対してワークの供給及び取り出しを行うロボットを制御するロボット制御装置
【課題】ロボットと工作機械を組み合わせて使用する加工システムにおいて、工作機械に関連する作業のためにロボットの動作を停止させる必要性を低減させ、作業効率を向上させる。
【解決手段】ロボット制御装置18は、ロボット制御装置18の操作を行うための持ち運び可能な教示操作盤46を備え、ネットワークケーブル42によって工作機械制御装置20,22と接続されている。教示操作盤46は、様々な情報を表示するための表示器を有し、工作機械制御装置20,22からネットワークケーブル42を介して取得した工作機械14,16に関する情報を教示操作盤46の表示器の工作機械用画面上に表示するように構成されている。
(もっと読む)
レーザ加工機
【課題】スケジュール運転中において実行できないスケジュールがあった場合に、当該スケジュールを後回しにして、それ以降の実行可能なスケジュールを実行した後で、再度当該スケジュールの実行を試みるレーザ加工機を提供する。
【解決手段】ワークWを支持する複数のパレットPを多段状に収納するストッカ1と、パレットPを載置してワークWにレーザ加工を施すためのパレット加工部41を有する加工ステーション4とを備え、記憶装置に記憶されたスケジュールリストに従って、前記ストッカ1からパレットPを一つずつ取り出し、前記加工ステーション4に搬送してレーザ加工を行うレーザ加工機であって、実行しようとするスケジュールで使用予定のパレットPに対して加工を行うことができるか否かを確認するチェック手段と、できない場合に前記スケジュールリストの実行順番からそのスケジュールを後回しにするスワップ手段とを備える。
(もっと読む)
ロボットシステム
【課題】複数台のロボットを複数人で並行して教示を行う時に、携帯操作盤に対応したロボットのみの動作を許可する、より簡易なロボットシステムを提供すること。
【解決手段】複数台のロボットと、ロボットの動作を許可または禁止するイネーブル装置を含む携帯操作盤とを備え、ロボットを駆動制御するロボット制御装置を通信路により互いに接続したうえで、各ロボットの動作モードとイネーブル装置の操作に基づくイネーブルリンク信号を各ロボット制御装置間に伝達することで、各携帯操作盤に対応するロボットの駆動電源の投入と遮断を制御する。
(もっと読む)
ロボットオフラインプログラミング装置
【課題】実機と同じ動作をするシミュレーションが可能なオフラインプログラミング装置を提供する。
【解決手段】ロボットオフラインプログラミング装置28は、NCシミュレータ10の第1通信モジュール26と通信回線24により接続され、第1通信モジュール26と信号等の情報の通信を行う第2通信モジュール30と、前記情報に基づいてロボットのシミュレーションを行うロボットシミュレーション装置すなわちロボットシミュレータ32と、ロボットシミュレータ32でのシミュレーション結果を用いてオフラインで教示プログラムを作成するプログラム作成装置34とを有する。ロボットシミュレータ32には、シミュレーション対象についての3次元CADモデルや仕様を表すデータが格納される。
(もっと読む)
数値制御式工作機械及びその割込み処理方法
【課題】 割込み指令が入力された際の安全性を確保することができる数値制御式工作機械及びその割込み処理方法を提供すること。
【解決手段】 数値制御装置50に割込み指令が入力されると、数値制御装置50は加工プログラム実行制御のバックグランドで割込み制御を実行させて、割込み受付フラグFaが1であるか否かを判断する。ここで、割込み受付フラグFaが1であるので(S20;Yes)、リミットスイッチ84がONであるか否かを判断する。リミットスイッチ84がONである場合は(S21;Yes)、タップ加工実行中であるか否かを判断する。ここではタップ加工を実行していないので(S22;No)、割込み処理を実行させる(S24)。
(もっと読む)
21 - 40 / 68
[ Back to top ]