
Fターム[3C269MN32]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | 各種オンオフ信号の監視 (68)
Fターム[3C269MN32]に分類される特許
41 - 60 / 68
ロボットのコントローラ
【課題】電源からロボット用電源とコントローラ用電源とを分岐して供給する構成のロボットシステムで、大電流を流すサーキットプロテクタを設けない構成とする。
【解決手段】交流電源ACからロボット本体1側にはコンタクタ5を介して給電し、コントローラ20側には直接整流回路10に給電している。コントローラ20は、コントローラCPU9、スイッチングIC16、遅延回路37、電源スイッチ20aなどから構成される。電源スイッチ20aがオンされると、コントローラCPU9が給電されてコンタクタ5をオンさせ、ロボット本体1を駆動制御する。電源スイッチ20aがオフされると、コントローラCPU9はロボット本体1の停止動作を行い、コンタクタ5をオフさせ、遅延時間をおいてトランジスタ35がオフされると、自身の給電が停止する。
(もっと読む)
数値制御式工作機械

【課題】 工具の折損を検出した場合、実行中の加工動作に対する停止態様を加工の種類に応じて設定できる数値制御式工作機械を提供すること。
【解決手段】 数値制御式工作機械は、工具折損検出装置37により工具18の折損を検出したときの停止態様として、即座に停止させる即停止と、実行中のブロックの加工動作終了時に停止させるブロック停止と、実行中の加工プログラム終了時に停止させる加工プログラム終了後停止とを、工具18の折損検出後に折損加工に使用する工具18又は切削加工を行う加工位置が折損加工位置情報にあるか否かに基づいて、択一的に設定可能に構成した。
(もっと読む)
工作機械
【課題】信号ケーブルを電子機器に接続する検出用コネクタを電子機器から引き抜かない限り、工作機械本体に電子機器に固定する締結部材を取り外すことができないようにした工作機械を提供する。
【解決手段】電子機器7を工作機械1に固定する為のベース板部材8は、ベース板部材8に形成した複数のボルト穴11b〜11dと、ベース板部材8のうちのケーブルコネクタ30で覆い隠される遮蔽領域に形成したボルト穴11aと、複数のボルト穴11a〜11dに夫々挿入した複数のボルト9a〜9dにより取付け面に固定され、この電子機器7は信号ケーブルによりホスト電子機器に接続され、電子機器を取り外そうとして信号ケーブルのコネクタを抜くと、ホスト電子機器に組み込んだ検出回路により検出され警報回路を介して警報ブザーが作動する。
(もっと読む)
機器制御システム
【課題】操作端末を複数の機械装置で共用化することができ、尚且つ安全性の高い機器制御システムを提供する。
【解決手段】複数のロボット装置1−1〜1−nと、任意に選択した一台のロボット装置に対して動作を教示するティーチングペンダント2とを備える産業用ロボットシステムであって、複数のロボット装置1−1〜1−nそれぞれは、自機器に固有のキーが挿入されることによってのみ第1の状態と第2の状態との切り替えが可能となるシリンダーを有し、ティーチングペンダント2は、各ロボット装置に固有のキー4−1〜4−nのいずれが挿入されても教示が行える状態と教示が行えない状態との切り替えが可能となるマスターシリンダー10と、教示対象となるロボット装置に対して接続要求を送信する接続要求送信手段とを有している産業用ロボットシステム。
(もっと読む)
安全制御方法および安全制御システム
【課題】 操作者の負担を軽減して安全制御システムの安全性をさらに向上させる。
【解決手段】 ワイヤレスティーチングペンダント2(21〜24)に設けられ、当該ペンダント2のID番号をロボット3のコントローラ4に送信するためのRFIC225と、コントローラ4に設けられ、ペンダント2から送信されたID番号を受信するためのRFIC405と、ペンダント2がペンダントホルダ6から取り出されたことを検知する安全スイッチ部62と、安全スイッチ部62による検知時にロボット3をメンテナンスモードに移行させ、操作可能エリア10に配置されかつコントローラ4により受信されたID番号を有するペンダント2の当該ID番号を登録リストに登録するとともに、エリア10の外に移動したペンダント2のID番号を登録リストから消去し、登録リストに登録されたID番号のペンダント2のみをイネーブル状態にするコントローラ4とを設ける。
(もっと読む)
往復移動装置の位置ずれ検出装置およびそれを備えたカッター装置
【課題】位置ずれを検出する専用のセンサが不要であり、少ない数のセンサによって位置ずれを検出する装置およびそれを備えたカッター装置を提供する。
【解決手段】移動体が所定の第1位置と第2位置との間で往復移動するようにモータを制御する通常制御を実行可能な制御装置と、前記第1位置から前記第2位置に向かって移動する前記移動体が前記第2位置を超えて所定の第3位置に到達したことを検出するリミットセンサと、前記リミットセンサによって検出されると、報知を行う報知装置と、を備えた往復移動装置における前記移動体の位置ずれ検出装置であって、前記制御装置は、前記報知装置の動作を停止させ、かつ、前記第1位置から前記第2位置に向かって移動する前記移動体を少なくとも前記第3位置の近傍にまで移動させるように前記モータを制御したうえで、前記リミットセンサの検出に基づいて前記移動体の位置ずれを検出する位置ずれ検出部を備えている。
(もっと読む)
ワーク寸法計測装置および工作機械
【課題】 ワークの材質および環境温度に応じた、より正確な補正値または補正係数を生成することができるワーク寸法計測装置および工作機械を提供する。
【解決手段】 計測器20と、計測器20で計測された計測値を補正値または補正係数で補正して計測出力値とする計測データ補正手段21とを備え、計測データ補正手段21は、計測器20が設置される環境温度の情報と、ワークWの材質の温度による熱変化量との関係を設定した材質別熱変化量設定手段22と、計測対象のワークWの材質の情報および環境温度の情報を入力する材質・環境温度入力手段23と、材質・環境温度入力手段23で入力されたワークWの材質の情報および環境温度の情報を、材質別熱変化量設定手段22の設定内容に照らして補正値または補正係数を生成する補正値生成手段24とを有する。
(もっと読む)
工作機械及び工作機械の制御方法
【課題】電子カム制御において、動作時間が不定な補機動作の完了と同時に後続の作業を実行することができて、加工能率を向上させることができる工作機械を提供すること。
【解決手段】中央演算ユニット52は、前記基準軸の動作量が所定値に達したことに応じて補機動作を開始させ、前記補機動作中において、補機動作終了時における前記基準軸の動作量の値をもとにシフト値を計算する。計算されたシフト値はシフトデータ記憶部57,58に記憶される。そして、記憶されたシフト値を前記基準軸の実際の動作量の値に加算して、補機動作終了時における前記移動体の移動位置に対応した動作量の値とする。電子カム制御部59,60は、前記補機動作終了にともない、保持された動作量の値に続くタイミングから前記電子カムデータテーブルに従って工作機械の電子カム動作を行わせる。
(もっと読む)
工作機械
【課題】 移動体の計測位置までの移動時間を共通化して計測を効率的に行うことで工作機械の加工精度と生産効率とを向上させた工作機械を提供する。
【解決手段】 刃物台2および背面側刃物台11に備えられた複数の移動軸に対してそれぞれ熱変位計測の実行条件を設定した計測条件データ記憶部53を備えた工作機械において、移動軸の一つが熱変位計測の実行条件を満たしたら、実行条件を満たした移動軸に加えて他の全ての移動軸に対しても計測移動動作を実行する。
(もっと読む)
数値制御装置
【課題】消費電力を低減することができ、また装置全体での省エネルギ化や発熱の抑制を現実的に実現することができる工作機械の数値制御装置を提供する。
【解決手段】信号用電源2と、一方側を信号用電源2に接続するとともに他方側を接地電位に接続し、操作スイッチの操作に対応した操作信号を生成するスイッチSWと、信号用電源2からスイッチSWへの通電を実質的に行う通電時間区分と、信号用電源2からスイッチSWへの通電を実質的に停止する非通電時間区分とを設定し、各区分に対応した通電処理を行う制御回路10、トランジスタTR及び負荷抵抗Rとを有する。
(もっと読む)
工作機械
【課題】短絡や地絡が発生した被制御機器を早期に特定することが可能な工作機械を提供する。
【解決手段】工作機械に接続される被制御機器に電圧を印加して制御を行う場合において、制御対象の被制御機器と印加電圧のON/OFFの情報とを履歴情報として記憶する。そして、短絡及び地絡の発生を検出した場合、履歴情報を参照し(S45)、検出時点で印加電圧をONしていた被制御機器を選択する(S47)。そして、選択した被制御機器のそれぞれに対して、順番に再度印加電圧をONする(S67)。この時点で再度短絡又は地絡を検出した場合(S69:YES、S71:YES)、電磁開閉器を開放して通電を遮断し(S79)、短絡又は地絡を検出した時点で印加電圧をONしていた被制御機器に短絡及び地絡の発生要因があると判断して、表示機に表示し(S85)、作業者に被制御機器を通知する。
(もっと読む)
パステーブル運転時の運転履歴を記憶する数値制御装置
【課題】パステーブル運転中にアラームが発生したとき、パステーブル運転における指令箇所を特定できるようにする。
【解決手段】パステーブル運転中、所定サンプリング周期毎に該サンプリング時の日時情報30、値が変化する基準信号の値31、該基準信号に同期して制御する軸の位置32、数値制御装置の状態情報33を運転履歴情報として所定時間分バッファ34に蓄える。アラーム発生時にバッファ34に蓄えた運転履歴情報を運転履歴保存用メモリ36に格納する。運転履歴保存用メモリ36に記憶する運転履歴情報を表示装置38に表示すれば、アラーム発生時のパステーブル運転での指令データの箇所、数値制御装置の状態、制御軸の位置が判明する。アラーム発生原因調査が容易となる。
(もっと読む)
移設判断機能付き工作機械
【課題】移設判断機能付き工作機械を提供すること。
【解決手段】工作機械の可動部の移動方向を記憶する移動方向記憶手段と、機械座標位置が予め設定範囲にある場合に電源遮断時の機械座標位置と移動方向記憶手段に記憶されている電源遮断前移動方向とを記憶する記憶手段と、電源再度投後、可動部が移動する前の機械座標位置と最初に可動部が移動した際の可動部の電源投入後移動方向とを取得し、電源遮断時機械座標位置と電源遮断前移動方向と電源投入時機械座標位置と電源投入後移動方向とを比較し、電源遮断前と反対方向に移動したか否かを判断する移動判別手段と、該移動判別手段が電源遮断前と反対方向に移動したと判断した場合、工作機械が電源遮断時に設置された場所から移設されたと判断する移設判断手段、を有する工作機械。
(もっと読む)
オペレータのレベルに応じた操作を可能とする数値制御装置
【課題】オペレータのレベルに応じた操作を可能とする数値制御装置を提供すること。
【解決手段】加工プログラムに基づいて工作機械を駆動してワークに指令通りの加工を施す数値制御装置1において、前記加工プログラムの取り扱いに関するオペレータの機密保護度を指定するセキュリティレベル指定手段12aと、前記加工プログラム毎に、前記セキュリティレベル指定手段により指定されたセキュリティレベルに応じた操作の可否を設定・記憶する操作可否情報設定・記憶手段14と、前記セキュリティレベル指定手段により指定されたオペレータのセキュリティレベルと、前記操作可否情報設定・記憶手段により記憶された操作可否情報とから、操作内容が実施可能であるか判断する操作可否判断手段13aとを備えた数値制御装置。
(もっと読む)
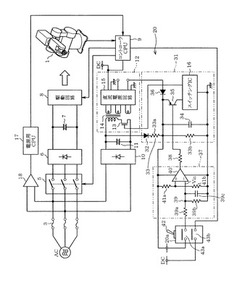
産業ロボットシステムにおける複数軸の制御方法および産業ロボットシステム
本発明は、ロード領域およびプロセス領域を含む作業セルと、人がロード領域に入ったときを検出する検出器(6)と、作業セル内に位置するマニピュレータと、工作物を保持するとともに、マニピュレータが工作物を加工する間に少なくとも1つの軸周りで工作物の方向を変化させるように構成されている少なくとも1つのポジショナと、1つの軸周りで可動であるとともに、コマンドを受け取ると、マニピュレータまたはポジショナをロード領域とプロセス領域との間で移動させるように構成されているステーション交換器とを備える産業ロボットシステムに関する。各軸にはモータ(M1−M3)と駆動ユニット(53−55)とが設けられる。軸コントローラ(50)は、ポジショナおよびステーション交換器の軸に停止を命令する第1のタスクと、ポジショナおよびステーション交換器の軸の動きを可能にする第2のタスクとの間で実行を切り換えるように構成されている。安全コントローラ(58)は、人がロード領域に入っていることを検出すると、ステーション交換器またはポジショナが動いているかどうかを監視するとともに、監視される軸のいずれかが動いていることが検出される場合、動いている軸の駆動ユニットを使用不能にする信号を生成するように構成されている。 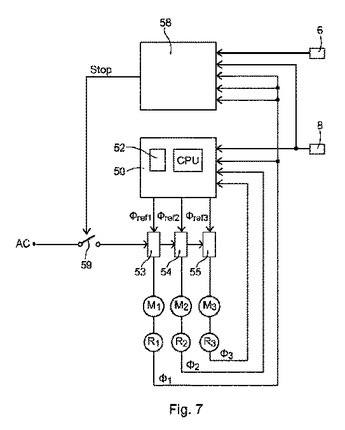 (もっと読む)
(もっと読む)
工作機械の動作制御方法及び工作機械
【課題】複数のアクチュエータを簡単な操作で停止させることができるとともに、それらのアクチュエータを操作ミスのおそれがなく、正確に動作再開させることができるようにすること。
【解決手段】モード切替スイッチ21の切り替えにより、加工プログラムの実行を停止して、複数のアクチュエータ38等の動作を継続する段取りモードを設定する。その段取りモードの設定状態で、ドア開レディボタン22の操作による機械の停止要求に応じて、複数のアクチュエータ38等の動作を停止させるとともに、停止した複数のアクチュエータ38等及びそれらの状態をRAM34に記憶させる。起動ボタン23の操作による停止要求の解除に応じて、記憶された複数のアクチュエータ38等の動作を再開させる。
(もっと読む)
数値制御装置に接続されたIOユニットの断線と電源断の検出方法
【課題】数値制御装置と工作機械に備えられるIOユニットの断線と電源断の検出方法を提供すること。
【解決手段】数値制御装置(CNC)6に接続された複数台のIOユニット1〜5の電源断検出方法において、IOユニット3で電源断が発生した際に電源断を検出するステップと、電源断を検出したことを通常の通信とは異なるタイミングおよび通常のデータパターンとは異なるデータパターンの通信パケットで前段のIOユニット2に送信するステップと、前段のIOユニットが前記通信パケットを受信する電源断検出情報として格納するステップとからなることを特徴とする電源断の検出方法。
(もっと読む)
シリンダ式のバランス装置を備えた工作機械
【課題】バランス装置の圧縮空気または加圧油の圧力に異常が生じたときに工具と被加工物が衝突するおそれがある。
【解決手段】圧力センサ33は、数値制御装置10に空気圧異常信号を出力する。数値制御装置10は、ブレーキ信号を出力してブレーキ装置4を作動させる。数値制御装置10は、所定の相対移動軌跡上の各位置で速度を徐々に小さくした移動指令データをモータ制御装置20に出力して、所定の減速時間後に移動指令データの出力を停止する。モータ制御装置20は、移動指令データに基づいて同期して送りモータ13,15,17を駆動制御するとともに、各同期制御軸毎に検出される速度が0のときにそれぞれ停止信号を出力する。数値制御装置10は、全ての停止信号を入力したときに主軸の移動体16を上昇させる移動指令データを出力する。
(もっと読む)
作りつけの表示ランプを有する手動式および押ボタン式両用の手動パルス発生器
本発明は作り付けの表示ランプを有する手動式および押ボタン式の両用の手動パルス発生器を提供する。この手動パルス発生器は回転パルス入力ユニットと中央処理ユニットとを備えている。中央処理ユニットは正転表示ランプと逆転表示ランプに接続されている。回転信号入力ユニットおよび/または押ボタン信号入力ユニットは出力信号を中央処理ユニットに転送し、ここで処理される。その後、差分チップを介して制御信号が出力される。一方、中央処理ユニットはフィードバック回路を通して制御信号を収集することにより、工作機械起動時のセルフチェックを行う。このパルス発生器は非接触構造を採用することにより、従来技術より使用寿命が大幅に延長し、長持ちする。さらに、手動パルス発生器に制御器、作りつけの表示ランプ、および押ボタン制御ユニットを取り付けることにより、従来の手動パルス発生器の欠点を克服し、故障発生率を低減し、作業効率を大幅に向上する。加えて、構成が簡単なため生産が容易であり、また工作機械制御の分野で広く普及することに適する。  (もっと読む)
(もっと読む)
外部信号入出力ユニットの診断方法及びシステム
【課題】数値制御装置で工作機械等の自動機械を制御する際に用いられる外部信号入出力ユニットの動作をI/Oユニットに診断回路を装備させることなく可能にするための方法及びシステム。
【解決手段】CNCに接続される複数のI/OユニットA1、A2・・の各「ホスト送受信」は、CNCからの信号パケットの受信毎に送信先指定データと診断結果ビットのデータ(0or1)を読み取る。診断実行時を表わす診断結果ビットのデータ「1」の受信時には、「診断用のDOデータ」が含まれる。DI、DO信号入出力端は短絡され、診断用ループが形成される。診断用のパケット信号は、診断用ループを通り、「外部信号用送受信」、「ホスト送受信」を経て、直接(I/OユニットA1の場合)あるいはCNC側の各I/Oユニットの「ホスト送受信」を経てCNCに渡される。CNCはこれを解析して各I/Oユニット異常判定を行なう。
(もっと読む)
41 - 60 / 68
[ Back to top ]