
Fターム[3D034CA03]の内容
操向リンク系及び4WS (6,986) | 4WSの目的、機能 (564) | 操舵性能の向上 (408) | 操縦性、旋回性 (153)
Fターム[3D034CA03]に分類される特許
1 - 20 / 153
自動車
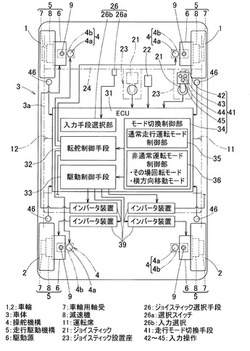
【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
自動車

【課題】 その場回転や、横方向移動等が可能な自動車において、運転者による運転操作の操作性の向上を図る。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される自動車に適用する。走行駆動機構5は、例えばインホイールモータ駆動装置とする。転舵機構4の操作および走行駆動機構5の駆動の操作を行うジョイスティック21を有する。
(もっと読む)
車両用前後輪転舵制御装置
【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
自動車の車体構造
【課題】車両旋廻時、車両後部が車両前部よりも旋廻外側に張り出すことを防止し、外輪差を気にすることなく運転できる自動車の車体構造を提供すること。
【解決手段】本発明の自動車の車体構造は、前輪3L,3Rの舵角θ2よりも後輪4L,4Rの舵角θ1が逆位相で相対的に大舵角とする舵角制御手段5と、右旋廻時に右側最大車体基準円11の内側に収まり、左旋廻時に左側最大車体基準円21の内側に収まる外側形状を有する車体2と、を有する。そして、右側最大車体基準円11は、右旋廻時最小回転半径の中心位置Pを中心点とし、車幅方向中心位置Oをはさんで中心位置Pと反対側の車体2上に設定する左車体基準点10を通る。また、左側最大車体基準円21は、左旋廻時最小回転半径の中心位置Qを中心点とし、車幅方向中心位置Oをはさんで中心位置Qと反対側の車体2に設定する右車体基準点20を通る。
(もっと読む)
車輪転舵装置
【課題】前輪の転舵動作に連動する入力軸の回転により後輪の転舵動作に連動する出力軸を回転させるときの入出力特性を適切なものとする。
【解決手段】車輪転舵装置において、入力軸側レバー54は、前輪の転舵動作と連動する入力軸30の回転にしたがって回動する。第1出力軸側レバー60および第2出力軸側レバー64は、各々が入力軸側レバー54と係合して回動されることにより、後輪の転舵操作と連動する出力軸32を回転させる。第1出力軸側レバー60は、前輪が右に転舵されたときに入力軸側レバー54に係合される。第2出力軸側レバー64は、前輪が左に転舵されたときに入力軸側レバー54に係合される。入力軸側レバー54は、前輪の転舵方向に応じて第1出力軸側レバー60および第2出力軸側レバー64のうち係合する出力軸側レバーを切り換える。
(もっと読む)
車輪転舵装置
【課題】前輪の転舵動作に連動する入力軸と後輪の転舵動作に連動する出力軸との間に差動が生じるよう入力軸と出力軸とを遊星ギヤを用いて連結する車輪転舵装置において、操舵角が小さい範囲と大きい範囲の双方において入力軸と出力軸との入出力特性を適切なものとする。
【解決手段】車輪転舵装置において、遊星ギヤ44は、前輪の転舵動作と連動する入力軸30の回転にしたがって太陽ギヤ42aに噛み合いながら太陽ギヤ42aの外周に沿って移動する。レバー46は、後輪の転舵動作に連動する出力軸32と遊星ギヤ44とを連結する。連結切換機構60は、入力軸30の回転角度が所定角度に達したときに、遊星ギヤ44とレバー46とを介して入力軸30と出力軸32とが連結される第1の機械的連結状態から、回動部材40と第2ピン50とを介して入力軸30と出力軸32とが連結される第2の機械的連結状態に切り換える。
(もっと読む)
車両の後輪操舵装置
【課題】コストアップや重量増加を招くことなく後輪を操舵して車両の旋回走行安定性を高めることができる車両の後輪操舵装置を提供すること。
【解決手段】後輪1をトーションビーム式のリヤサスペンション2によって車体に懸架する車両の後輪操舵装置12を、前記後輪1に駆動力を伝達するプロペラシャフト5の回転をラック14の車幅方向の往復直線運動に変換するラックアンドピニオン機構(運動変換機構)13を設け、該ラックアンドピニオン機構13によって変換されたラック14の往復直線運動を左右のタイロッド15を介して前記リヤサスペンション2に伝達し、該リヤサスペンション2をその車体取付点の弾性を利用して左右方向に傾けるように移動させて前記後輪1を操舵するよう構成する。
(もっと読む)
ステアリングシステム
【課題】 車両の使用される状況や車両の特徴等に合う実用性の高いステアリングシステムを提供することを課題とする。
【解決手段】 ステアリングシステムが、運転者によって操作されるステアリングホイール26を有する操作装置16と、前輪14Fを回転可能に保持しつつ、その前輪を転舵させる前輪転舵装置18と、ステアリングホイールの操作に応じて前輪転舵装置による前輪の転舵を実現させる伝達装置20とを有し、伝達装置を、車両が直進する状態からのステアリングホイールの操作量が、第1操作量と、その第1操作量よりも大きな第2操作量との間にある場合に、ステアリングホイールの操作に拘らず車輪を転舵させないように構成する。それにより、前輪の転舵を途中で制限し、横滑り等の不安定な走行状態の発生を防止しつつ、必要に応じ、前輪を大きく転舵させることができる。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
車両操舵装置及びインホイールモータ車両
【課題】操舵軸に改良を加えることにより、ダンパーを追加しても必要以上に大型化することが避けられ、しかも十分大きい回転トルクを伝達できる車両操舵装置を提供することである。
【解決手段】インホイールモータ形式の車輪と、車台に設置された操舵用の駆動装置と、前記駆動装置の出力軸とインホイールモータユニットとの間に介在された操舵軸とからなる操舵装置において、前記操舵軸が、駆動装置側と一体化された内軸25と、モータユニット側と一体化された外軸26により構成され、外軸26に内軸25が軸方向に相対移動可能に嵌合された継手部28が設けられ、前記継手部28の内部に緩衝装置41及びトルク伝達部40が設けられた構成とした。
(もっと読む)
運動量制御装置
【課題】 制御対象の運動状態が安定するように設定されたフィードバックゲインを用いて制御対象の運動量をフィードバック制御する運動量制御装置を提供すること。
【解決手段】 運動量制御装置は、複数のアクチュエータのうちの一つのアクチュエータを単独で作動させることにより制御対象の運動量をフィードバック制御した場合に用いる最適フィードバックゲインを、複数のアクチュエータのそれぞれが単独で作動した場合についてそれぞれ取得する最適フィードバックゲイン取得部と、最適フィードバックゲイン取得部により取得された複数の最適フィードバックゲインのうち最小のフィードバックゲインを制御系のフィードバックゲインとして設定するフィードバックゲイン設定部とを備える。
(もっと読む)
車輪ストラット
【課題】乗物に容易に取り付けることができ、乗物用のステアリング手段や車輪用の駆動装置のような他の手段を容易に結合することができる車輪ストラットを提供する。
【解決手段】車輪ストラットは、車輪ストラットを乗物に取り付ける乗物取付け手段108と、車輪ストラットに車輪を取り付ける車輪取付け手段105と、を備えている。車輪取付け手段は、乗物取付け手段108に対して、車輪ストラット100の長手方向軸の周りに回転可能である。車輪ストラット100は、車輪取付け手段を回転させる駆動手段103,101を備えている。
(もっと読む)
操舵装置
【課題】左右車輪のトー角を調節するとともに、左右車輪を操舵する操舵装置を提供する。
【解決手段】車両の左右車輪(後輪)2a、2bを操舵する操舵装置1であって、車体に取り付けられる操舵ハウジング50と、この操舵ハウジング50に収容され左右車輪2a、2bに連携する操舵ロッド10と、操舵ハウジング50に対して操舵ロッド10を左右方向に移動する操舵機構9と、操舵ロッド10の長さを左右方向について変えるトー角調整機構14とを備える。
(もっと読む)
制御装置
【課題】流量制御弁の制御の安定性を向上させ、それに伴い油圧アクチュエータの駆動制御を安定化させると共に、油圧アクチュエータの応答性を確保できる制御装置を提供すること。
【解決手段】流量制御弁10の目標開度は、油圧アクチュエータ11の駆動量と目標駆動量とに基づいて設定されるので、流量制御弁10の開度と油圧アクチュエータ11の駆動量とを関連付けられる。さらに、流量制御弁10の開度をフィードバックして流量制御弁10の開度を調整するので、流量制御弁10の制御の安定性を向上させ、それに伴い油圧アクチュエータ11の駆動制御を安定化させると共に、油圧アクチュエータ11の応答性を確保できる。
(もっと読む)
操舵制御装置
【課題】駐車時における操作性を向上させた操舵制御装置を提供する。
【解決手段】操舵制御装置10のECU40は自車両100の左前輪21〜右後輪24の操舵角を制御する。ECU40は、自車両100が駐車枠Pに平行ではないときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が異なる方向である逆相となるように制御する。逆相とすることにより自車両100の方向を変更しやすくなり、自車両100を駐車枠Pに平行にすることが容易となる。また、ECU40は、自車両100が駐車枠Pに平行であるときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が同じ方向である同相となるように制御する。同相とすることにより自車両100の方向を維持しつつ平行に移動させ、自車両100と駐車枠Pとの左右の間隙を調整することが容易となる。
(もっと読む)
搬送台車
【課題】 従来の台車は、各隅角に設けた四個の車輪と、台車の走行方向の中央部の前後端に対の転舵車輪を設け、転舵車輪を無端ベルトで懸架し、前端の転舵車輪を、前方連結部材で操作し、前端の転舵車輪の方向に対して、後端の転舵車輪の方向を、逆方向にする構造で、内輪差を無くし、狭い範囲での旋回を可能とする。しかし、転舵車輪を固定用の車輪に変換する構造は開示されていない。
【解決手段】 本発明は、搬送用の台車の基板には、台車の走行方向の左右端中央部で、かつ前後方向において、軸受部を介して、対の固定車輪を架承、また、この台車には、走行方向の中央で、かつ前後方向において、軸受部を介して、対の転舵車輪を設けた搬送台車で、ハンドルの立上げで、転舵車輪、固定用の車輪に変換し、手押し式の台車に、また、ハンドルを水平状態として、この転舵車輪、旋回用の車輪に変換し、牽引式の台車にする構造である。
(もっと読む)
電動台車
【課題】積載荷重による走行性能の変動が少なく、転回・斜行・横行の機能を備え舵取りも容易で未熟練者であっても容易に操作することができるパワーアシスト付きの電動台車を提供する。
【解決手段】台車底部の四隅に前輪2と後輪3とを配設し、操作部6を備えた運転制御部5を設け、該運転制御部5により旋回方向及び駆動力を制御される電動駆動輪4を配設した電動台車であって、運転制御部5は電動駆動輪4をパワーアシストするパワーアシスト制御部55と、操作部6に加えられる前後進の操作力を検出するセンサ7と、操作部6による電動駆動輪4の旋回角度を検出する角度センサ8とを備え、前輪2にはこの角度センサ8から出力された信号により前輪2を操舵する操舵機構部10を設け、電動駆動輪4に対し前輪2の同位相及び逆位相への操舵と、前輪2の中立固定の機能を備える。
(もっと読む)
搬送台車の車輪装置
【課題】 従来の公知文献は、台車に設けた4個の車輪と、台車の前進後退における走行方向の中央部に対の転舵車輪を設け、転舵車輪を無端ベルトで懸架し、一方の転舵車輪を、前方連結部材で、一方の転舵車輪の方向に対して、他方の転舵車輪の方向を、逆方向にする構造であり、内輪差を無くし、狭い範囲での旋回を可能とし、また、転舵車輪を備えた台車の構造の簡素化を図る。結果的には、構造の簡素化は疑問視される、また、前方連結部材での操作であり、問題がある。
【解決手段】 本発明は、台車に設けた対の固定車輪と、対の固定車輪と十字形状に設けた対の転舵車輪とで構成し、対の転舵車輪は、それぞれの軸受に設けたカム板を、左右端方向に向かって、対峙して設け、かつカム板の自由端に、カム板を連動するリンクロッドの自由端を枢着することで、リンクロッドを、中央に対して偏芯位置に設ける構成を採用し、牽引車との内輪差を失くす構造とした台車である。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
1 - 20 / 153
[ Back to top ]