
Fターム[3D034CB03]の内容
操向リンク系及び4WS (6,986) | 4WSを装備した車両の種類 (112) | 産業車両 (36) | 構内運搬車 (15)
Fターム[3D034CB03]に分類される特許
1 - 15 / 15
走行駆動換向装置
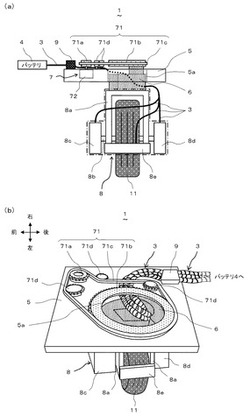
【課題】走行駆動換向装置において、装置高さを低く抑える。
【解決手段】走行駆動換向装置1は、車両フレーム5に旋回可能に軸支された旋回軸6と、旋回軸6を任意の方向に旋回させる操舵ユニット7と、旋回軸6の下端部に設けられ、車輪11を回転駆動する走行モータ8cを含む走行ユニット8と、を備える。走行モータ8cから導出された電源ケーブル3は、旋回軸6の内部に挿入され、旋回軸6の中を横切って車両フレーム5上に水平方向に引き出されて、走行モータ8cの動作を制御するコントローラ9へ接続される。これにより、車両フレーム5上に引き出された電源ケーブル3による装置高さの増大を抑制することができる。
(もっと読む)
制御装置

【課題】流量制御弁の制御の安定性を向上させ、それに伴い油圧アクチュエータの駆動制御を安定化させると共に、油圧アクチュエータの応答性を確保できる制御装置を提供すること。
【解決手段】流量制御弁10の目標開度は、油圧アクチュエータ11の駆動量と目標駆動量とに基づいて設定されるので、流量制御弁10の開度と油圧アクチュエータ11の駆動量とを関連付けられる。さらに、流量制御弁10の開度をフィードバックして流量制御弁10の開度を調整するので、流量制御弁10の制御の安定性を向上させ、それに伴い油圧アクチュエータ11の駆動制御を安定化させると共に、油圧アクチュエータ11の応答性を確保できる。
(もっと読む)
搬送台車
【課題】 従来の台車は、各隅角に設けた四個の車輪と、台車の走行方向の中央部の前後端に対の転舵車輪を設け、転舵車輪を無端ベルトで懸架し、前端の転舵車輪を、前方連結部材で操作し、前端の転舵車輪の方向に対して、後端の転舵車輪の方向を、逆方向にする構造で、内輪差を無くし、狭い範囲での旋回を可能とする。しかし、転舵車輪を固定用の車輪に変換する構造は開示されていない。
【解決手段】 本発明は、搬送用の台車の基板には、台車の走行方向の左右端中央部で、かつ前後方向において、軸受部を介して、対の固定車輪を架承、また、この台車には、走行方向の中央で、かつ前後方向において、軸受部を介して、対の転舵車輪を設けた搬送台車で、ハンドルの立上げで、転舵車輪、固定用の車輪に変換し、手押し式の台車に、また、ハンドルを水平状態として、この転舵車輪、旋回用の車輪に変換し、牽引式の台車にする構造である。
(もっと読む)
電動台車
【課題】積載荷重による走行性能の変動が少なく、転回・斜行・横行の機能を備え舵取りも容易で未熟練者であっても容易に操作することができるパワーアシスト付きの電動台車を提供する。
【解決手段】台車底部の四隅に前輪2と後輪3とを配設し、操作部6を備えた運転制御部5を設け、該運転制御部5により旋回方向及び駆動力を制御される電動駆動輪4を配設した電動台車であって、運転制御部5は電動駆動輪4をパワーアシストするパワーアシスト制御部55と、操作部6に加えられる前後進の操作力を検出するセンサ7と、操作部6による電動駆動輪4の旋回角度を検出する角度センサ8とを備え、前輪2にはこの角度センサ8から出力された信号により前輪2を操舵する操舵機構部10を設け、電動駆動輪4に対し前輪2の同位相及び逆位相への操舵と、前輪2の中立固定の機能を備える。
(もっと読む)
搬送台車の車輪装置
【課題】 従来の公知文献は、台車に設けた4個の車輪と、台車の前進後退における走行方向の中央部に対の転舵車輪を設け、転舵車輪を無端ベルトで懸架し、一方の転舵車輪を、前方連結部材で、一方の転舵車輪の方向に対して、他方の転舵車輪の方向を、逆方向にする構造であり、内輪差を無くし、狭い範囲での旋回を可能とし、また、転舵車輪を備えた台車の構造の簡素化を図る。結果的には、構造の簡素化は疑問視される、また、前方連結部材での操作であり、問題がある。
【解決手段】 本発明は、台車に設けた対の固定車輪と、対の固定車輪と十字形状に設けた対の転舵車輪とで構成し、対の転舵車輪は、それぞれの軸受に設けたカム板を、左右端方向に向かって、対峙して設け、かつカム板の自由端に、カム板を連動するリンクロッドの自由端を枢着することで、リンクロッドを、中央に対して偏芯位置に設ける構成を採用し、牽引車との内輪差を失くす構造とした台車である。
(もっと読む)
編成搬送台車設備
【課題】複数の台車により運搬物を運搬する編成搬送の途中で、ステアリング伝送手段にトラブルが発生しても、編成搬送を継続できる。
【解決手段】マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードと走行モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から求めた編成旋回中心から、各車輪装置の編成スレイブ軸目標舵角をそれぞれ演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、スレイブ台車(SC)に、ステアリング伝送手段(41A,42,43A)の故障時に、マスタ台車(MC)の操舵装置(M3)と同一角度で操作されるステアリング操舵角と、編成データ出力部(52)の編成データとにより、マスタ台車(MC)の編成旋回中心と同一位置となる従動編成旋回中心を求めて各車輪装置を操舵する操舵コントローラ(S20A)を設けた。
(もっと読む)
編成搬送台車設備
【課題】複数の独立換向式の車輪装置を有する複数の台車を使用して、大型の運搬物を運搬する。
【解決手段】複数台のうち1台をマスタ台車(MC)とし、残りをスレイブ台車(SC)とし、マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から台車群の編成旋回中心を求め、この編成旋回中心から各車輪装置の編成スレイブ軸目標舵角を演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)とを設け、スレイブ台車(SC)に車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、マスタ台車(MC)からスレイブ台車(SC)の舵角指令部(M20B)に編成目標舵角を送信する伝送ケーブル(43A)を設けた。
(もっと読む)
作業用車両
【課題】簡単な構造で小回り旋回をすることができ、比較的安価な作業用車両を提供する。
【解決手段】作業機が搭載される機体2の前後左右に配され、該機体2を支持している二つの走行輪3,3a及び二つの遊動輪4,4aと、走行輪3,3aを駆動するエンジン5と、該エンジン5及び走行輪3,3aを連動連結している動力伝達機構6と、機体2の操向を行う操向ハンドル7とを備え、走行輪3,3a、エンジン5及び動力伝達機構6を機体2に対して旋回させることが可能なユニットAに形成し、該ユニットAを機体2に上下方向の枢軸8を中心として旋回を可能に枢支し、小回り旋回が行えるようにした。
(もっと読む)
自走台車のステアリング制御装置、自走台車、およびステアリング制御方法
【課題】自走台車の全のタイヤのステアリング軸の遅れ角をほぼ同一にし、タイヤに負担がかかることを防止し、タイヤの摩耗を減少させる。
【解決手段】全てタイヤ100のステア角を、タイヤ角度検出器31により常時検出し、比較器15により、個々のタイヤごとにステア指令角信号Vsとステア角FDBK信号とを比較し、ステア偏差角を求める。そして、最大偏差角演算回路18により、個々のタイヤのステア偏差角の内から最大偏差角を求める。ステア偏差角補正回路19では、最大偏差角の情報を基に、個々のタイヤ100のステア偏差角に補正を加え、この補正されたステア偏差角を基に、個々のタイヤ100の油圧機構に流れる油量を制御して、各タイヤのステア角を制御する。これにより追従が特に悪い軸(ステアリング遅れ角が大きい軸)に積極的に油を流すようにし、ステアリング遅れ角をほぼ同一にする。
(もっと読む)
モバイルデッキリフター
【課題】左右方向に走行可能なモバイルデッキリフターを提供する。
【解決手段】
本発明は、原動機が搭載された車体と、車体の前方側に取付けられた運転席及び操向輪と、車体の後方側に取付けられた駆動輪と、車体の前後に装着されリフティング過程において車体を安定させるアウトトリガー部と、油圧によってモバイルデッキを昇降させるデッキ昇降部と、を含んで構成され、前輪と後輪のすべての輪が個別駆動できるように各輪のホイール内部に原動機を設置し、原動機が設置されるブラケットを車軸にヒンジ軸で連結させ、車軸の一側にブラケットを回動させる回動装置を設置し、両側のブラケットを同調リンクで連結して回動させるようにしたことを特徴とする。
(もっと読む)
四輪操舵式無人搬送車の操舵制御方法
【課題】曲線外側への車体の膨らみを最小限としながら曲線内側へのはみ出しも抑えて曲率の大きな曲線を円滑に走行することができる四輪操舵式無人搬送車の操舵制御方法を提供する。
【解決手段】四輪操舵式無人搬送車が曲線を走行する際の制御方法であって、曲線進入前の直線走行状態(地点A)から、曲線入口部での前輪操舵段階(地点A〜B)と、曲線部での前後逆位相操舵段階(地点B〜C)とを行って曲線を走行するように制御する。さらに、曲線出口部で後輪操舵段階(地点C〜D)を行い、曲線を出たとき(地点E)には直線走行状態に復帰させる制御を行う。
(もっと読む)
走行車および走行車システム
【課題】従来の走行車では、ある走行車のスピンターン動作時に他の走行車の走行を停止させる必要があったので、走行車システムの効率低下や能力低下を招いていた。
【解決手段】車体1aの前後部に、それぞれ方向変換可能な前駆動輪2aおよび後駆動輪2bを備えた走行車1であって、前記前後駆動輪2a・2bのうち、一方の駆動輪を中心として、または前記前後駆動輪2a・2bの中間位置を中心として車体1aを旋回させることができ、かつその旋回中心を適宜選択可能とする。
(もっと読む)
コンテナ用ガントリークレーン、コンテナ輸送用パレット、コンテナ搬送車、および、コンテナ輸送方法
【課題】コンテナ積み降ろしの際の輸送効率を改善するコンテナ輸送方法,コンテナ用ガントリークレーン,コンテナ輸送用パレット,コンテナ搬送車の提供。
【解決手段】岸壁ヤード1’において、コンテナ3をコンテナ輸送用パレット6に順次移載するとともに、岸壁ヤード1’とコンテナ保管ヤード4間を往復するコンテナ搬送車7により、上記パレット6のコンテナ保管ヤード4への搬送と、空のパレット6の上記コンテナ保管ヤード4から上記岸壁ヤード1’への搬送を行うコンテナ輸送方法。ガーダ11上を走行するトロリー12を複数備え、コンテナ3を把持するスプレッダ14をその各トロリー12に対して吊下したコンテナ用ガントリークレーン。枠体の下方に架台受入用空処21’を形成したコンテナ輸送用パレット。上記パレット6を乗載する架台35と、架台昇降機構とを備えたコンテナ搬送車。
(もっと読む)
ヤードキャリア
【課題】公道上におけるヤードキャリアの運用を可能とするために、道路交通法に準拠した制動能力を有するパーキングブレーキをヤードキャリアに与える。
【解決手段】サスペンション16を縮めて荷台12を下降限度位置まで下降させることにより、ブレーキパッド36を複数のタイヤ14の各トレッド部に当接させ、車体のばね上重量の少なくとも一部を利用してブレーキパッド36をタイヤのトレッド部に強力に押し付け、タイヤ14の回転を強制的に規制することができる。よって、道路交通法に準拠した制動能力を有するパーキングブレーキを、ヤードキャリア10に与えることが可能となる。一方、走行開始前にはサスペンション16を伸張させて、ブレーキパッド36がタイヤの各トレッド部に当接しない高さへと荷台を上昇させ、ブレーキパッド36によるタイヤ14の回転規制を解除することで、ヤードキャリア10は走行することが可能となる。
(もっと読む)
搬送用車両
【課題】負荷走行時、積載荷重の一部を駆動輪に負荷して輪荷重を増やし、走行に必要な摩擦力が得られる構成でありながら、駆動輪換向形式にも容易に採用でき、構造を簡単かつ整然とした搬送用車両を提供する。
【解決手段】車体5の中間下部の複数箇所に荷重支持用車輪装置10を設け、車体5の前後下部にそれぞれ走行駆動用車輪装置20を設けた。車体5の上部に被搬送物3の支持体50を昇降自在に設け、支持体50を昇降させる前後一対の昇降手段55を車体5側に設けた。走行駆動用車輪装置20を車体5側に対して換向自在かつ昇降自在に設けるとともに、下降付勢する付勢手段47を設けた。支持体50により被搬送物3を支持したときに昇降手段55に掛かる荷重負荷に応じて走行駆動用車輪装置20に下降力を付加しかつ換向を許容する連動手段60を設けた。
(もっと読む)
1 - 15 / 15
[ Back to top ]