
Fターム[3D041AA47]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | スリップ防止 (310)
Fターム[3D041AA47]の下位に属するFターム
Fターム[3D041AA47]に分類される特許
1 - 20 / 73
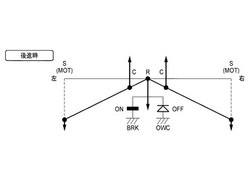
前後輪駆動車両
【課題】車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供する。
【解決手段】後輪駆動装置1と前輪駆動装置6とを備えた車両3であって、後輪駆動装置1は、車両3の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪Wrとの動力伝達経路上に設けられ、解放又は締結することにより電動機2A、2B側と後輪Wr側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに油圧ブレーキ60A、60Bを制御するECU45と、電動機2A、2Bと後輪Wrとの動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられる一方向クラッチ50と、を備える。車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、後輪駆動装置1に後進駆動力を発生させるときに、ECU45は油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。
(もっと読む)
車両の制御装置

【課題】走行抵抗が急低下したとき、加速度の急変を抑えつつ、ドライバの意図に合致した駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】電気自動車1は、アクセル開度センサ7と、走行抵抗演算部12と、走行抵抗急低下判断部14aと、単調増加変数演算部13cと、電子コントロールユニット5と、を備えた。走行抵抗演算部12は、車両走行中、外乱による走行抵抗推定値FDを検出する。走行抵抗急低下判断部14aは、車両走行中、走行抵抗の急低下を検出する。単調増加変数演算部13cは、走行抵抗の急低下を検出したとき、アクセル開度に基づいて車両駆動力の単調増加変数を設定する。電子コントロールユニット5は、単調増加変数と走行抵抗推定値FDに基づいて目標車両駆動力を設定し、タイヤへ加える駆動力抑制により、実車両駆動力を前記目標車両駆動力に収束させる制御を行う。
(もっと読む)
車両の駆動状態制御装置
【課題】オンデマンド式装置において、4輪駆動状態から2輪駆動状態への切り換えの際、クラッチ駆動電流が無駄に消費されること、並びに、車輪に大きなスリップが発生することを抑制すること。
【解決手段】2輪駆動状態において駆動輪(後輪)に加速スリップが発生したとき、駆動システムが2輪駆動状態から4輪駆動状態へと切り換えられる。即ち、多板クラッチ機構の伝達可能最大トルクTが「0」から所定値T1に増加する。4輪駆動状態では、車輪の何れにも加速スリップが発生しない状態で車両が所定距離Daだけ走行する毎に、伝達可能最大トルクTが現在値から所定値Aだけステップ的に減少していく。即ち、多板クラッチ機構C/Tに供給されるクラッチ駆動電流Iが徐々に(ステップ的に複数回)減少していくとともに、前輪(後輪)への駆動トルク配分が徐々に減少(増加)していく。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定し、車両旋回状態にて各車輪の不要な前後スリップの発生を抑制しつつ小回り性を向上し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の基準位置(点O)が決定され、この基準位置から車両に近い側に車両の旋回中心(点P)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωptが演算される。この目標角速度と、旋回中心からの各車輪の距離Rpw[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され且つ小回り性が向上するように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づく。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
車両の駆動力制御装置
【課題】 後輪車輪速センサの異常時に対して、トランスミッションの保護および車両のドライバビリティの確保を両立させる。
【解決手段】 少なくとも後輪車輪速センサにより検出された後輪車輪速を用いて低摩擦係数路面を判定し、低摩擦係数路面が判定されるとフュエルカットやシフトチェンジの制限を行ってトランスミッションの保護を図るものにおいて、(a)後輪車輪速センサが異常であること(ステップS114)、(b)シフトレンジがリバースレンジからドライブレンジに操作されてから所定時間が経過したこと(ステップS112)、(c)変速段が3速以上になったこと(ステップS113)の各条件のうち、(a)の条件が成立した場合、あるいは(b)の条件および(c)の条件の少なくとも一方が成立した場合に、異常の可能性がある後輪車輪速を用いた低摩擦係数路面の判定を禁止し、トランスミッションの出力軸回転数から算出した車輪速で後輪車輪速を代用する。
(もっと読む)
4輪駆動車のタイヤ力制御装置
【課題】前後駆動力配分制御手段および制動力制御手段を適切に制御することで前後左右全4輪のタイヤ力を最大限活用し、タイヤ限界付近における車両安定性を維持しつつ限界性能を向上させる。
【解決手段】全4輪のうち3輪のタイヤ力が各輪の摩擦円限界値を超えた(飽和した)場合であっても残り1輪でもって3輪トータルのオーバータイヤ力を吸収できる場合は、前後駆動力配分制御部31でもって、左右輪とも飽和している前輪2輪もしくは後輪2輪のオーバータイヤ力の総和だけ飽和していない1輪を有する後輪2輪もしくは前輪2輪に駆動力を移動する。その後、ブレーキ制御部32でもって、各輪のタイヤ力が摩擦円限界値を超えないよう制動力制御する。
(もっと読む)
電気自動車の車両制御装置
【課題】各車輪を別個独立した電気モータによって駆動する電気自動車において、タイヤ毎のノンユニフォーミティの影響を低減し、操縦安定性の低下を防止する。
【解決手段】電気自動四輪車10の車両制御装置100は、ヨーモーメント演算部140と、スリップ率演算部150と、スリップ率制御部160とを備え、ヨーモーメント演算部140において算出されたヨーモーメントが零になるスリップ率を算出する。トルク演算部170は、直進判定・加速度演算部120において直進状態であることが検出されたとき、スリップ率制御部160によって算出された「ヨーモーメントが零になるスリップ率」になるように、インホイールモータ30FL,30FR,30RL,30RRの出力トルクを最適化する。
(もっと読む)
車両運動制御システム
【課題】ドライバーの違和感を低減して車両の適正な挙動を確保できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1では、車両10の操舵角に基づき推定された将来の横加速度と、将来の道路情報に基づき推定された将来の横加速度とのうち低い方の横加速度が選択される。また、この選択にて車両10の操舵角に基づき推定された将来の横加速度が選択された場合には、現在の車両状態に基づき推定された車両の将来の座標と将来の道路情報とが用いられて車両10が所定のコースから逸脱するか否かが判定される。そして、この判定にて肯定判定が行われた場合には、将来の道路情報に基づき推定された将来の横加速度が用いられて、目標ヨーレートが算出される。
(もっと読む)
車両運動制御装置
【課題】セルフステア状態が発生しても、実ヨーレートを適正に制御できる車両運動制御装置を提供する。
【解決手段】予め取り決められた規範ヨーレートを目標値として車両に発生する実ヨーレートを制御するダイレクトヨーコントロールデバイスを有し、ステアリング装置にセルフステアが発生すると、規範ヨーレートに替えて、実ヨーレートを抑制するように目標値を設定する。セルフステア状態を原因として発生する実ヨーレートを、一律に抑制して低減させるので、運転者に違和感を与えることのない適正な制御を実ヨーレートに行うことができる。
(もっと読む)
車両運動制御装置
【課題】走行エネルギの損失が少ないスムーズで高燃費な走りと最大の車両運動性能を発揮することを走行状態に応じて的確にバランスさせる。
【解決手段】前後制駆動力制御装置30は、目標ステア特性を実現するエネルギ損失最小の前後軸の制駆動力を第1の前後制駆動力Fxfte、Fxrteとして算出し、目標ステア特性を実現しなおかつ前後軸の最大タイヤ横力の和を最大にする前後軸の制駆動力を第2の前後制駆動力Fxftp、Fxrtpとして算出する。そして、横加速度(d2y/dt2)を基に算出した前後軸のタイヤ横力Fyf、Fyrと路面情報(路面μ)に基づいてグリップマージンMgを設定し、グリップマージンMgに応じて第1の前後制駆動力Fxfte、Fxrteと第2の前後制駆動力Fxftp、Fxrtpとを基に前後軸の目標制駆動力Fxft、Fxrtを算出して制駆動力制御装置20に出力する
(もっと読む)
車両用制御装置、車両用制御装置の制御方法、駆動力配分制御装置及び駆動力配分制御装置の制御方法
【課題】トルク配分装置の過熱を防止しつつ、車輪のスリップを抑制できる車両用制御装置、車両用制御装置の制御方法、駆動力配分制御装置及び駆動力配分制御装置の制御方法を提供する。
【解決手段】車両1に、各車輪12R,12L,13R,13Lに制動力を付与するブレーキ装置と、ブレーキ装置の作動を制御して車両1の走行安定性を向上させるESC制御を実行するESCECU33とを搭載した。4WDECU31は、トルク配分装置6の温度を推定する。そして、4WDECU31は、推定された温度が閾値温度よりも大きい場合には、スリップ閾値を第1の閾値から該第1の閾値よりも小さい第2の閾値に変更させるための閾値用制御信号S1をESCECU33に出力するようにした。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】タイヤの摩擦限界に対する余裕度をより適切に推定する。
【解決手段】車両状態推定装置は、接地面において前記車輪のセルフアライニングトルクと前記車輪のスリップ度との比である入力を設定するためのタイヤスリップ角演算部43、セルフアライニングトルク演算部45及びセルフアライニングトルク−スリップ角比演算部46と、その入力を基に、車輪のグリップ特性を示すグリップ特性パラメータである出力を決めるためのトルク勾配演算部48及びμ勾配演算部49を備える。
(もっと読む)
運転支援装置
【課題】操舵力制御と制駆動力制御との制御分担比を適切に設定する運転支援装置を提供する。
【解決手段】自車両前方の環境情報に基づいて自車両を操向する運転支援装置を、自車両前方の環境を認識する環境認識手段110と、環境認識手段を用いて自車両の目標操向量を算出する目標操向量算出手段140と、操舵輪タイヤが発生するタイヤ力を算出するタイヤ力算出手段170と、操舵輪タイヤの限界タイヤ力を推定する限界タイヤ力推定手段167と、操舵機構に付与される操舵力を制御する操舵力制御手段200と、左右輪の制駆動力差を制御する制駆動力制御手段190と、目標操向量を所定の制御分担比で割り振ることにより操舵力制御手段の目標操舵力及び制駆動力制御手段の目標制駆動力差を設定するとともに、タイヤ力の限界タイヤ力への接近に応じて、制駆動力制御手段の操舵力制御手段に対する制御分担比を増加させる制御分担比設定手段180とを備える構成とする。
(もっと読む)
車両の挙動制御装置
【課題】車体スリップ角及びその微分値並びにその2階微分値に基づいて算出されるスピン状態量を制御量として車両のスピン挙動を抑制する挙動制御装置に於いて、急操舵が繰り返されたとき車体スリップ角の2階微分値の寄与によるスピン抑制効果の低減を回避すること。
【解決手段】本発明の装置は、車両の左右方向のうちの一方の方向に操舵が実行されて車体スリップ角の2階微分値の大きさが所定値を超えた後の所定の期間内に前記の一方の方向とは逆の方向に操舵が実行され車体スリップ角の2階微分値の大きさが所定値を超えたときには、スピン状態量に於ける車体スリップ角の2階微分値の寄与が低減されることを特徴とする。
(もっと読む)
車両の挙動制御装置
【課題】車体スリップ角及びその微分値並びにその2階微分値に基づいて算出されるスピン状態量を制御量として車両のスピン挙動を抑制する挙動制御装置に於いて、急操舵が繰り返されたとき車体スリップ角の2階微分値の寄与によるスピン抑制効果の低減を回避すること。
【解決手段】本発明の装置は、車両の左右方向のうちの一方の方向に操舵が実行されて車体スリップ角の2階微分値の大きさが所定値を超えた後、スピン状態量に於ける車体スリップ角の2階微分値の寄与が徐々に低減されることを特徴とする。
(もっと読む)
車両の制御装置
【課題】排気浄化装置の浄化能力を回復させる回復制御を行う車両において、クロール制御を安定して行うことができる車両の制御装置を提供する。
【解決手段】車両は、ディーゼルエンジンの排気の浄化を行う触媒コンバータ及びPMフィルタを含む排気浄化装置が設けられる。排気浄化装置における浄化能力を回復させる回復制御に相当するPM再生制御及びS被毒回復制御が電子制御装置により行われる。また、電子制御装置により車両の速度を所定の低速領域に維持するクロール制御が実行される。クロール制御が実行される際に回復制御の実行を禁止する回復制御禁止判定処理が電子制御装置により実行される。
(もっと読む)
移動体の位置検出装置、および位置検出装置を利用した車両制御装置
【課題】高精度で相対位置を測定すると共に相対位置に誤差が積算されることを防止することが可能な位置検出装置、および当該位置検出装置を利用した車両制御装置を提供する。
【解決手段】移動体の位置検出装置10は、複数のGPS衛星からのGPS信号を受信する受信アンテナ11と、各GPS信号の搬送波の位相を検出開始時刻から所定時間ごとに検出し、当該所定時間ごとの位相差を積算することにより、検出開始時刻からの位相変化量を演算する位相差積算部15と、位相差積算部により演算された位相変化量に基づいて、検出開始時刻における基準位置に対する相対位置を演算する相対位置演算部16と、を備える。
(もっと読む)
車両停止保持装置
【課題】制動力保持機能を備えた車両が、滑り易い道路を発進する場合を想定し、運転者の操舵操作を補助して車両姿勢の立直しを確実に図ることを可能とした車両停止保持装置を提案する。
【解決手段】ブレーキペダルの踏込の操作後、当該踏込操作が解除されたときに車輪の制動力を保持可能とする制動力保持手段を有している車両停止保持装置において、前記制動力保持手段が起動しているときに、走行路に対する車両の移動の有無を検出する移動検出手段と、前記車両の操舵角を検出する操舵角検出手段を含み、前記移動検出手段が車両の移動を検出したときに、運転者による操舵操作に応じて車両のヨー挙動を制御するヨー挙動制御手段とを備える。運転者によるステアリング操作を積極的にアシストするので、車両が滑り易い道路に停車した後に発進するときに発生する滑りに対して有効に対処しながら車両姿勢を修正できる。
(もっと読む)
1 - 20 / 73
[ Back to top ]