
Fターム[3D041AA49]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | スリップ防止 (310) | アンチスキッド制御 (78)
Fターム[3D041AA49]に分類される特許
1 - 20 / 78
車両の統合制御装置
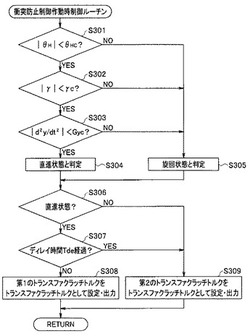
【課題】衝突防止制御装置が自動ブレーキを発生して障害物との衝突を回避するにあたり、ABSの作動や車両の走行状態を考慮しつつ4輪の前後力を最大限活用して短い制動距離で停止することを可能として安全性、信頼性を向上させる。
【解決手段】衝突防止制御装置30が障害物との衝突を防止する制動力を発生させる際に、統合制御ユニット50は、自車両が直進状態の場合は、ディレイ時間Tdeが経過するまでは前後軸間の締結トルクCawdとして通常時に設定される締結トルクの値またはデフロック状態となる締結トルクの値である第1のトランスファクラッチトルクを設定させ、その後は、締結トルクCawdを略0に近い第2のトランスファクラッチトルクに低下させる。また、自車両が旋回状態の場合は、第2のトランスファクラッチトルクを設定させる。
(もっと読む)
車両制御装置

【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両負荷が大きいときに第2クラッチの過剰な発熱を抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータの間に第1クラッチを有し、モータと駆動輪の間に第2クラッチを有するハイブリッド車両において、車両負荷が所定値以上のときは、エンジンを作動させた状態で第1クラッチを解放し、モータをエンジン回転数よりも低い回転数として第2クラッチをスリップ締結することとした。
(もっと読む)
車両制御システム及び車両制御装置
【課題】タイヤの状態を適正に制御することができる車両制御システム及び車両制御装置を提供することを目的とする。
【解決手段】車両2の車輪3に生じる制動力を調節可能な制動力調節手段7と、車輪3に装着されるタイヤ13の温度を検出する検出手段14と、タイヤ13の温度に基づいて、制動力の増減の周期を可変とする制御装置8とを備えることを特徴とする。したがって、タイヤ13の状態を適正に制御することができる、という効果を奏する。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
車両の制御装置および制御方法
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】駆動力源とその駆動力源の出力側に連結された変速機とを搭載した車両における前記駆動力源の回転数もしくは前記変速機の変速比を制御する車両の制御装置において、前記車両の走行状態に基づく指標を求めるとともに、その指標に基づいて前記駆動力源の要求回転数もしくは前記変速機に対する要求変速比を制御するように構成されている。
(もっと読む)
車両の制御装置
【課題】低μ路の制動におけるフューエルカット復帰時のエンジンストールをより確実に回避することのできる車両の制御装置を提供する。
【解決手段】車両の惰性走行時にエンジンのフューエルカットと、エンジン出力軸及び変速機入力軸のロックアップと、を行う車両にあって、ブレーキ圧積算値が既定の解除判定値βを超えることを条件に、ロックアップ実行フラグ及びフューエルカット実行フラグをオフにセットして、ロックアップの開放とフューエルカットからの復帰とを実施するようにした。
(もっと読む)
車両の協調制御装置
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
路面摩擦係数演算装置
【課題】路面摩擦係数演算装置に関し、車両の走行状態に関わらず、路面状況に対応する路面摩擦係数を算出する。
【解決手段】車両に作用する前後加速度を検出する前後加速度検出手段1と、該車両に該前後加速度が検出されない状態での定常走行継続時間を計測する計時手段2と、計時手段2で計測された該定常走行継続時間が第一所定時間以上となったときに、該車両に微少制動力又は微少駆動力を第二所定時間だけ付与する制動駆動力付与手段3と、該微少制動力又は該微少駆動力が付与された後に、該車両が走行する路面の摩擦係数を算出する路面摩擦係数算出手段4とを備える。
計時手段2は、路面摩擦係数算出手段4で該摩擦係数が算出されたときに該走行経過時間をリセットして再び該定常走行継続時間の計測を開始する。これにより、所定時間毎に周期的に路面の摩擦係数が算出される。
(もっと読む)
車両接触回避支援装置
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
車両の制御装置
【課題】駆動輪がスキッドしたと判定されるとき、駆動源の出力トルクの変動を低減して車両の挙動を安定させるようにした車両の制御装置を提供する。
【解決手段】車両に搭載されたエンジンの出力を変速してドライブシャフを介して駆動輪に伝達する自動変速機を備えた車両において、車輪速センサの出力に基づいて駆動輪がスキッドしたか否か判定し(S10)、駆動輪がスキッドしたと判定されるとき、ドライブトレーンから出力される駆動源の出力トルクを算出し、それから予想される車両の第1の走行加速度G1を算出すると共に、車輪速センサの出力に基づいて駆動輪の回転速度から予想される車両の第2の走行加速度G2を算出し(S12からS20)、算出された第1、第2の走行加速度G1,G2に基づいて出力トルクの余剰トルクを算出し(S24)、算出された余剰トルクを除去する(S26からS38)。
(もっと読む)
車両挙動制御装置
【課題】 スラローム走行時等における円滑な制御を実現した車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS24でベース係数Kbに遅延フィルタ処理を行ってフィルタ係数Kfを算出/設定した後、ステップS25でベース係数Kbとフィルタ係数Kfとを和すことで係数合算値Ksを求める。次に、ATTS−ECU16は、ステップS26で係数合算値Ksが判定閾値Kthより大きいか否かを判定し、この判定がYesであればステップS27で不感帯係数Knを1とする。これにより、駆動力配分制御において制御指示ベース値Dbがそのまま目標駆動力配分制御値Dtgtとなる。なお、判定閾値Kthは、十分に小さな値に設定されている。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両の運動制御装置
【課題】日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】車両の横滑り情報から算出したヨーモーメント制御指令に基づいて、四輪のうちの左右輪に異なる制駆動力を発生するモードで実現される車両前後加速度が、横運動に連係した加減速制御指令との差が近くなるように四輪のうちの左右輪に略等しい制駆動力を加えるように補正制御する。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
側方障害物回避装置及び側方障害物回避方法
【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】車線区分線を検出できない場合があっても、側方障害物に対する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】自車両側方の障害物を検出すると、運転者の操舵入力に基づき所定時間後の自車両の将来位置を予測する。その予測した自車両の将来位置が、上記障害物に近い側の車線区分線を基準とした判定閾値に到達若しくは当該判定閾値よりも障害物側と判定すると、側方障害物に対する支援制御の開始と判定する。但し、障害物に近い側の車線区分線を検出できない場合には、上記制御開始を判定する際に基準とする車線区分線を車線幅方向外側へ変位させる。
(もっと読む)
車両用制駆動力制御装置
【課題】 ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる車両用制駆動力制御装置を提供する。
【解決手段】 エンジン39の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルクを低減させる。
(もっと読む)
1 - 20 / 78
[ Back to top ]