
Fターム[3D041AA80]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 安全性、フェイルセイフ (931) | 故障診断、警報 (143)
Fターム[3D041AA80]に分類される特許
81 - 100 / 143
ナビ協調走行制御システム、ナビ協調走行制御方法、および、ナビゲーション装置
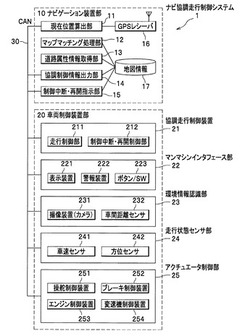
【課題】誤った走行制御の実施を回避する。
【解決手段】道路属性情報取得部13は、地図情報17から走行中の車両前方の道路に付された道路属性情報(一時停止線、カーブ、速度制限区間など)を取得し、協調制御情報出力部14は、その道路属性情報に応じた協調制御情報を出力し、協調走行制御装置21に対し、所定の協調走行制御を指示する。また、制御中断・再開指示部15は、協調走行制御が不可となる可能性がある道路属性情報(三差路など)が取得されたときには、協調走行制御の可・不可を判定し、不可であったときには、協調走行制御装置21に対して制御の中断を指示し、警報装置222によりその旨をドライバに通知する。また、制御再開が可能になったときには、協調走行制御装置21に対し制御の再開を指示し、警報装置222によりその旨をドライバに通知する。
(もっと読む)
車両及びその制御方法、駆動装置

【課題】駆動軸に動力を出力する電動機の回転検出手段が異常状態であると疑われる際に、より確実に回転検出手段の状態の検出を実行することができる。
【解決手段】ハイブリッド自動車20は、システム起動時に、回転位置検出センサ44が正常状態であると検出されていないときには、変速機60による回転軸48とリングギヤ軸32aとの接続を禁止すると共に回転位置検出センサ44の状態を検出するようモータMG2を制御し、この検出結果が、回転位置検出センサ44の状態が異常状態であるときには、エンジン22からの直達駆動力だけがリングギヤ軸32aに出力されるようエンジン22とモータMG1とを駆動制御する。このように、モータMG2の回転位置検出センサ44が異常状態であると疑われる際には、回転軸48とリングギヤ軸32aとの接続を禁止して、リングギヤ軸32aへモータMG2から動力が出力されてしまうのを防止する。
(もっと読む)
歩行者横断支援装置、車載装置、タグ装置
【課題】歩行者の個人差を考慮した横断支援を実現する歩行者案内システム、車載装置及びタグ装置を提供すること。
【解決手段】歩行者19が携帯する通信装置14から歩行者19の識別情報46を取得する歩行者情報取得手段22と、歩行者19の識別情報に対応づけて歩行速度Vwが記憶された歩行者情報記憶手段35と、歩行者の横断箇所に接近する車両の位置情報Lc、Vcを検出する位置情報検出手段16と、歩行者19の識別情報に基づき抽出された歩行速度Vw及び横断箇所の幅員Lw、並びに、位置情報Lc,Vcから、歩行者19と車両17が接触するか否かを判定する判定手段32aと、判定手段32aにより歩行者19と車両17が接触すると判定された場合、歩行者19に警告する警告制御手段32bと、を有することを特徴とする歩行者横断支援装置99を提供する。
(もっと読む)
車線維持支援装置
【課題】運転者の覚醒度が低下した際に、操舵補助トルク付与による自車両の旋回半径を小さくし、車線からの逸脱をより効果的に防ぐことができる車線維持支援装置を提供する。
【解決手段】車線維持支援装置100は、自車両が走行する車線を認識し、自車両が車線を逸脱するか否かを判定し、逸脱すると判定した場合に、自車両の位置を車線内に維持するための操舵補助トルクを付与する装置であって、車輪に制動力を付与する制動力付与手段12と、運転者の覚醒度を検出するドライバ状態検出部3とを備え、ドライバ状態検出部3により得られる覚醒度が低下している場合であって自車両が車線を逸脱すると判定した場合に、自車両の位置を車線内に維持するための制動力を制動力付与手段12により付与する。
(もっと読む)
車両用ブレーキ装置
【課題】液圧発生手段および車輪ブレーキ間に介設される常開型電磁弁を含む液圧制御手段と、液圧保持条件の成立時に常開型電磁弁を閉弁するようにして液圧制御手段の作動を制御するコントローラとを備え、乗員の操作によって駐車ブレーキ状態を得ることを可能とした車両用ブレーキ装置において、車輪ブレーキの液圧保持状態で、液圧保持状態を解除する解除指令が乗員の誤操作によって出されたときに、駐車ブレーキ操作を乗員により確実に促すようにする。
【解決手段】コントローラ20は、解除指令出力手段41からの解除指令出力時に、乗員の操作による駐車ブレーキ状態が得られていないことを検出した際には、所定時間または所定距離だけ動力源による駆動力または路面傾斜による自重の重力加速度成分によって車両を移動させるようにして液圧制御手段5の作動を制御する。
(もっと読む)
車両の横転防止装置
【課題】簡単な制御及び構成によって横転防止の効果を得る。
【解決手段】横転防止装置は、パワーステアリング装置2が搭載された車両1に設けられ、ロール状態判定手段3とステアリング回転方向判定手段4と操舵アシスト力低減手段5とを備える。パワーステアリング装置2は、操舵アシスト力を付与することにより運転者からのステアリングホイールの回転操作を補助する。ロール状態判定手段3は、車両1が横転する可能性が高いか否かを判定する。ステアリング回転方向判定手段4は、ステアリングホイールが横転回避方向へ回転操作されたか否かを判定する。操舵アシスト力低減手段5は、車両1が横転する可能性が高いとロール状態判定手段3が判定し、且つステアリングホイールが横転回避方向へ回転操作されていないとステアリング回転方向判定手段4が判定したとき、パワーステアリング装置2が付与する操舵アシスト力を低減させる。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】道路状況に応じた設定車速を設定する。
【解決手段】自車両の速度が設定車速と一致するように車両を制御する装置において、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更する。
(もっと読む)
衝突回避装置
【課題】 自車両から離れた障害物に対して、精度よく衝突可能性を判定することにより、無駄な衝突回避制御や警報の発生を防止しながら、早期に衝突回避制御を行わせ、また警報を発生させることができる衝突回避装置を提供する。
【解決手段】衝突回避ECU1は、基本走行軌跡推定部12において、自車両の推定カーブ半径に基づく走行軌跡を推定し、変更走行軌跡推定部15において、自車両と白線との相対的な位置関係に基づいて、自車両と白線との離間距離を求め、この離間距離を維持した状態で白線に沿った経路を変更走行軌跡として推定する。衝突判定部17では、自動操舵制御や逸脱警報制御が行われていない場合には、基本走行軌跡推定部12で推定された基本走行軌跡に基づいて衝突判定を行い、自動操舵制御や逸脱警報制御が行われている場合には、走行軌跡を変更走行軌跡推定部15で推定された変更走行軌跡に変更して衝突判定を行う。
(もっと読む)
車両の走行安全装置
【課題】運転者の安全装置に対する依存度を推定し安全装置の作動に反映させる。
【解決手段】運転者の加速意志を検出する車両加速状態検出部13bおよび加速操作検出部13cと、認識カーブに対する依存判定距離を算出する依存判定距離算出部19aと、運転者の安全装置18に対する依存度を推定する依存度推定部19と、備え、依存度推定部19は、自車位置検出部12により検出された自車位置と認識カーブ入口との距離が依存判定距離算出部19aにより算出された依存判定距離以下であり且つ乗員の加速意志が検出された場合には、運転者が安全装置18に対し依存していると推定するとともに、運転者が安全装置18に対し依存していると推定した場合には安全装置18の作動が抑制されるように設定を変更する。
(もっと読む)
車両の衝突防止装置
【課題】運転者の入力操作による車両の運動制御と衝突防止装置による車両の運動制御との調整を行い、衝突回避能力を高いレベルに保ちつつ、車両の運動に対する運転者への違和感をできるだけ少なくした車両制御を実現できる衝突防止装置を提供することである。
【解決手段】運転者の運転状況検出手段11と、車両周囲の障害物の情報を基に障害物との衝突を回避するための回避運動計算手段12と、前記回避運動計算手段12の回避運動計算結果と前記運転状況検出手段11で検出した運転者の入力操作とを合成して障害物との衝突を回避する車両行動決定手段13と、前記車両行動決定手段で決定した車両行動に基づいて運転操作の支援を行う運転支援手段14を有し、車両行動決定手段13は、運動マップ上で運転者の入力操作と回避運動計算結果とに重み付けして運転者の入力操作と回避運動計算結果とを合成して障害物との衝突を回避するための車両行動を決定する。
(もっと読む)
衝突被害軽減システム
【課題】衝突被害を確実に軽減することができるようにする。
【解決手段】車両の進行方向の物体を検出するレーダ装置11と、走行速度等を検出する車両状態検出部13と、車両が前記物体と衝突する危険度を判定する警報・制動判定部22と、他の車両との間で無線通信を行う無線通信部18と、を備えた複数の車両からなる衝突被害軽減システムであって、第1の車両1に搭載された警報・制動判定部22により第1の車両1の進行方向に存在する第2の車両2に対する衝突危険度が閾値以上と判断された場合には第1の車両1は第2の車両2へ警報情報を送信し、第2の車両2は、第1の車両1から警報情報を受信し且つ第2の車両2のレーダ装置11により第2の車両2の前方所定範囲に物体が検出されない場合に第2の車両2の走行制御手段が第2の車両を発進もしくは停止保持解除または加速を行う。
(もっと読む)
周辺監視装置及び周辺監視方法
【課題】後続車両の影響を考慮し、歩行者との接触事故を確実に回避すること。
【解決手段】歩行者認識部11によって自車両前方の歩行者を認識し、危険度判定部21が自車両の走行速度と歩行者の位置に基づいて危険度を算出する。さらに、後続車両検知部15によって自車両に追突する可能性のある後続車両を検知し、後続車両が存在する場合には後続車両の自車両に対する相対速度と距離に基づいて危険度補正部22が危険度を補正する。得られた危険度から、運転者通知部23、歩行者通知部24、後続車両通知部25、動作介入部26による歩行者保護制御を実行する。
(もっと読む)
車両用制御装置
【課題】自車両に接近する後方車両をより確実に回避すること。
【解決手段】車両用制御装置10は、後方車両の自車両への接近を検出する接近検出手段1aと、自車両の車速が設定された制限速度以下となるように、車速の制限制御を行う車速制御手段1bと、を備えている。また、接近検出手段1aにより、後方車両の接近が検出されたとき、車速制御手段1bは制限制御を解除するのが好ましい。さらに、車線変更検出手段21aにより、自車両の車線変更が検出されているときにおいて、車速制御手段1bは制限制御を解除するのが好ましい。
(もっと読む)
衝突回避支援装置及びそれを搭載した車両
【課題】自車の推定進路内に占める障害物の大きさと障害物との相対速度に基づいて介入開始タイミングを変化させ、安全性を損なうことなく介入操作による運転者に対する違和感を低減することができる衝突回避支援装置の提供。
【解決手段】介入タイミング算出手段103は、前方障害物との距離情報と前方障害物と自車との相対速度情報とから前記介入制御を開始する介入予定タイミングを算出する。進路余裕度算出手段112は、自車の走行する予定進路にある前方障害物の横方向の大きさと位置情報から前方障害物が自車の推定進路内を塞ぐ大きさを算出し、介入タイミング補正手段104は、前記進路余裕度算出手段112で算出した推定進路内を塞ぐ大きさによって前記介入予定タイミングを補正して介入開始タイミングを決定する。
(もっと読む)
走行支援装置
【課題】必要な状況にのみ走行支援を行い、運転者が違和感を覚えることなく自車両の衝突を防止することのできる走行支援装置を提供する。
【解決手段】自車両が交差点に向かって非優先道路を走行していると判断されると共に、自車両の斜め前方に存在する他車両が検出されると、自車両と他車両とが、衝突する可能性があるか否かが判定され、その結果に応じて回避支援部が作動される。この時、自車両が交差点に向かって非優先道路を走行していると判断されていると、優先道路を走行している場合に比べて、衝突する可能性があると判定し易くする。従って、自車両が非優先道路を走行している場合には、適切な走行支援を行い、優先道路の場合には走行支援を行いにくくする。
(もっと読む)
ステアリングシステムの安全方法
【課題】ステアリングシステムの安定性と有効性を増加させると同時に、誤動作を起す可能性の検出を増やし、またはそうした誤動作をより早く検出することで、車両の安全性を高める方法を提供する。
【解決手段】不安定度と潜在的に危険な誤動作を検出する電動ステアリング支援を備えた自動車ステアリングシステムの監視用安全方法に関する。これは、ステアリング列の量を少なくとも一回測定し調整することを決定するステップと、ダイナミックドライブシステム40の量を少なくとも一回測定し調整することを決定するステップと、前記決定した各量を比較して、その信憑性を確認するステップと、前記決定した各量が基準の各量から過剰な偏差を有する状態で動作し、前記ステアリングを安全な状態にするステップと、を備える。
(もっと読む)
車輌の制御装置
【課題】車輌の挙動の急変を回避しつつ制御量が異常な値になった場合に異常な制御量に基づいて不適切な制御が長く継続されることを防止する。
【解決手段】転舵角可変装置24により左右前輪の舵角を適正に制御することができない異常が生じたときには(S220)、目標転舵角Δδtの大きさが各サイクル毎に漸次減少するよう目標転舵角Δδtが漸減処理され(S270)、目標転舵角Δδtが異常な値であるときには(S240)、推定目標転舵角Δδthの大きさが各サイクル毎に漸次減少するよう推定目標転舵角Δδthが漸減処理され(S250)、推定目標転舵角Δδthが目標転舵角Δδtに設定され(S260)、推定目標転舵角Δδthの漸減の速さは目標転舵角Δδtの漸減の速さよりも高く、推定目標転舵角Δδthは目標転舵角Δδtよりも速やかに漸減される。
(もっと読む)
運転者状態推定装置及び運転支援装置
【課題】生体情報が正常に測定できない場合であっても、生体情報に基づいた運転者の状態の推定を行う。
【解決手段】ドライバの生体情報を計測し、正常に生体情報が計測できている場合には、計測した生体情報からドライバの状態(正常状態、覚醒度低下等)を推定する。一方、推定したドライバの状態に対応して、正常に生体情報を計測した際の運転状況(車両情報と環境情報)を蓄積することで、生体情報に基づくドライバ状態を運転状況から推定するドライバモデルを構築しておく。ドライバの生体情報の検出が正常である場合には、計測した生体情報に基づいて現在のドライバの状態を推定し、正常でない場合には、ドライバモデルを使用して現在の運転状況からドライバの状態を推定する。
(もっと読む)
ドライバーアシストシステム
本発明はパラメータによって定められる複数のアシスト機能を有するドライバーアシストシステムに関する。本発明によれば、ドライバーアシストシステムは可変のパラメータによって適応化可能に構成されている。  (もっと読む)
(もっと読む)
車両用運転支援装置
【課題】運転者の運転操作に影響を及ぼす心身状態に応じた適切な運転支援を行う車両用運転支援装置を提供することを目的とする。
【解決手段】制御部20において、車両搭載装置50のGPS車載器54から車両の前方にある交差点までの距離をし、その距離が小さければ危険度が大きく、距離が小さければ危険度は小さいとして危険度を決定する。また、室内カメラ12から入力した運転者のまぶたの動きから運転操作に影響を及ぼすような運転者の状態を推定する。さらに、GPS車載器54から走行履歴を取得して走行履歴記録装置18に記録する。そして、走行履歴及び運転者の心身の状態から、危険度に応じて、車両搭載装置50の表示装置56や音声出力部58で運転支援のための告知を行ったり、車両走行装置30のブレーキ制御装置34、エンジン制御装置36、ステアリング制御装置38で運転制御支援を行う。
(もっと読む)
81 - 100 / 143
[ Back to top ]