
Fターム[3D041AA80]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 安全性、フェイルセイフ (931) | 故障診断、警報 (143)
Fターム[3D041AA80]に分類される特許
21 - 40 / 143
車両運転支援装置
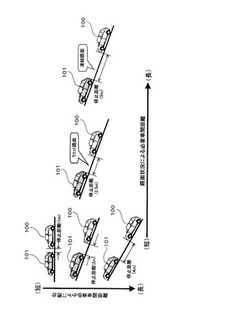
【課題】停車場所の状況により必要な車間距離を取って停車するように運転者に促したり制動を掛けたりするとともに、必要に応じて衝突の回避措置を強制的に行ない、他車両との衝突を確実に防止する。
【解決手段】車両(自車)100の前方もしくは後方の車間距離と、自車100の接地面の勾配や状況とに基づき、自車100の前方もしくは後方について必要な車間距離が決定され、この必要車間距離と現在の車間距離とに応じ、自車100の運転者に対する通知もしくは警報または自車100の制動もしくは操舵が行なわれる。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム

【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。このドライバ状態係数Kは、自車両に先行車両の画像を撮影する撮像手段を備えておき、その撮像手段の撮影した先行車両の画像の面積の単位時間当たりの変化度合いから算出する。
(もっと読む)
衝突軽減制御装置
【課題】この発明は、被害時に被ったエネルギを吸収して損害を抑制し、乗員への被害を軽減し、車両の挙動が不安定とならないようにすることを目的としている。
【解決手段】この発明は、衝突軽減制御装置において、衝突軽減制御手段は、予知装置により側方衝突が予知された時に、予知された衝突が発生する衝突発生側を判別し、自動ブレーキ制御装置を、ブレーキ装置が作動しない程度に遊びをなくす与圧駆動制御し、拘束制御装置がシートベルト装置に設けたモータを駆動して所定の状態までシートベルトを巻取るよう巻取り駆動制御し、サスペンション制御装置は衝突発生側とは車両上で逆側のサスペンション装置を選出した上でそれらの減衰力を衝突発生側と比較して減少させるよう減衰力低減制御し、警報装置を所定の状態で警報動作制御する、第一の段階の統合制御を実施することを特徴とする。
(もっと読む)
操舵支援装置
【課題】 運転者の意図に応じた補助操舵トルクを付与することにより、運転者に与える違和感を軽減しながらハンドル操舵に適応した操舵支援制御が行うことができる操舵支援装置を提供する。
【解決手段】 逸脱防止支援ECU10は、操舵トルクが操舵トルクしきい値を超え、制御トルクが制御トルクしきい値を超えた時間が成立判定時間しきい値を超えたときに、干渉判定を成立させて、目標制御トルクを小さくする。ここで、車両の前方に他車両が走行し、他車両と白線との距離が所定値以下であり、かつ車両の他車両に対する到達時間が所定値以下の場合に操舵トルクしきい値、制御トルクしきい値、および成立判定時間しきい値を小さくする。
(もっと読む)
車両用衝突回避装置
【課題】運転者の認識しやすい範囲に存在する物体よりも自車の前方および前左右側方を横移動する物体、例えば、交差点において、一時停止後に交差点内に進入してくる交差車両を優先して警報または制御対象として抽出することができる車両用衝突回避装置を提供する。
【解決手段】警報対象または自動制動対象を判定するための衝突予測時間に基づいた閾値を、横移動物体と判別されなかった物体に対する閾値と、横移動物体と判別されなかった物体に比べて早めに警報または自動制動が発生するように設定された横移動物体と判別された物体に対する閾値の2種類もつようにしたものである。
(もっと読む)
車両制御システム
【課題】複数の車両制御装置の間で起動条件の違いなどにより起動タイミングがずれることで、車両制御装置に故障がないにも拘わらず、適切な制御ができなくなることを避けることができるようにする。
【解決手段】RTCコントローラ1及びVSAコントローラ2を備え、このコントローラのうちの1つから他のコントローラに所要の信号が入力されない場合には、そのコントローラを故障と判断して他のコントローラの制御を禁止するようにした車両制御システムにおいて、当該車両の起動から所定の待ち時間が経過するまでは、1つのコントローラから他のコントローラに信号が入力されない場合でも、他のコントローラが制御を禁止するフェール状態とならないようにする。
(もっと読む)
車両の制御装置
【課題】車輪速センサの故障時に差動装置を過度な負荷から保護することができる車両の制御装置を提供する。
【解決手段】駆動制御ECUは、車輪速センサの故障時において、エンジン回転数センサおよびモータジェネレータの回転数センサから入力される信号に基づき、差動装置の入力回転数RevFinを算出する(ステップS11)。そして、差動装置の入力回転数RevFinが、差動装置において許容される左右の車輪の回転数差から求められる上限値を超えないよう、駆動力発生装置を制御する(ステップS13)。
(もっと読む)
車両の速度制御装置
【課題】カーブを通過する際、運転者の車両を加速させたいという意志に応じて、運転者の違和感が少なく且つ円滑な速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】カーブ車速制御において、運転者が加速操作を行わない場合(加速操作量Ap=0)に対応する目標車速Vtoが、第1、第2、第3目標車速Vto1,Vto2,Vto3で構成される特性に従って決定される。Vto1は、地点Pcrまで減少して地点Pcrにて適性車速Vqoとなり、Vto2は、地点Pcrから地点Pcaまで適正車速Vqoに維持され、Vto3は、地点Pcaから地点Pcsまで増大する特性に決定される。運転者による加速操作量Apに基づいて修正車速Vzが演算され、制御中に亘ってVtoにVzが加算されて目標車速Vt(=Vto+Vz)が決定される。そして、車速が目標車速Vtを超えないように調整される。
(もっと読む)
周辺車両監視装置及び周辺車両監視方法
【課題】交通事故の発生をより高い確率で抑止し、運転者のストレスを低減する。
【解決手段】自車両と先行車両との間に一定の車間距離があり、自車両の隣接車線を走行する周辺車両が自車両の斜め前方を走行している状況において、周辺車両の挙動から該当周辺車両が自車両と先行車両との間に割り込みを行うと予測される。そして、運転者に対して割り込みの可能性が報知されるとともに先行車両との車間距離を更に取る様にアドバイスされ、状況によっては自車両の制動制御が自動的に行なわれる。この様にして、周辺車両の微妙な挙動から起こりうる危険な状況を予測して未然に回避することによって、運転者の交通事故回避に対するストレスを軽減させ、交通事故の防止を図ることができる。
(もっと読む)
制御システムおよび車両
【課題】車両の円滑な減速を可能にする制御システムおよびそれを備えた車両を提供する。
【解決手段】変速制御システムは、CPU、スロットルセンサ、シフトアクチュエータおよび燃料噴射装置を備える。CPUは、スロットルセンサの検出値によりスロットルバルブの制御不良を検知した場合、自動二輪車が予め設定された負の目標加速度で走行するように燃料噴射装置を制御してエンジンの出力を調整する。また、CPUは、自動二輪車の速度低下に従って変速機が段階的にシフトダウンされるようにシフトアクチュエータを制御する。
(もっと読む)
車両の走行制御装置
【課題】後続車の接近中に自車両の目標車速が変更されたときの加減速度を適正に制御することにより乗員の安全性向上を図る。
【解決手段】本発明の車両の走行制御装置は、自車両の走行速度をあらかじめ設定された目標車速に一致させる自動速度制御を行う自動速度制御手段2と、上記目標車速を一定速度刻みで増大または減少させる目標車速変更指示手段(23)と、自車両の後方を走行する後続車を検知する後続車検知手段(11)とを備える。上記自動速度制御手段2は、上記目標車速変更指示手段(23)により目標車速が変更されたときに、上記後続車検知手段(11)からの入力情報に基づき後続車が自車両に対し接近していることが確認されると、上記目標車速の変更に応じて自車両を加速または減速させる際の目標加減速度を、後続車が接近中でないときに設定される通常の目標加減速度βとは異なる値(α,γ)に変更する。
(もっと読む)
車両の制御装置
【課題】エンジントルクに影響を与える機器の異常に応じて制御を行なうとともに、エンジン以外の制御システムを共通化する。
【解決手段】エンジンコントロールシステム700は、エンジントルクの実現もしくは推定に影響を与える複数の機器の異常を示す情報を集約する。さらにエンジンコントロールシステム700は、複数の機器のうちの少なくともいずれか一つの機器の異常が検出された場合には、エンジントルクの実現精度もしくは推定精度が低下することを示す情報を出力する。トランスミッションコントロールシステム800は、エンジントルクの実現精度もしくは推定精度が低下することを示す情報に応じて、オートマチックトランスミッションを制御する。クルーズコントロールシステム900は、エンジントルクの実現精度もしくは推定精度が低下することを示す情報に応じてクルーズコントロールを実行する。
(もっと読む)
車両の車線逸脱警報装置
【課題】自車両が走行している車線の走行区分線を検知することで、自車両の走行環境に応じて走行安全性と頻繁な警報作動の防止との両立を図ることができる車両の車線逸脱警報装置を提供する。
【解決手段】S10の判定の結果、Noの場合、左走行区分線Laが実線で右走行区分線Laが破線か否か判定し、Yesの場合、右側方或いは右斜め後に他車両CBが走行しているか否か判定する。S19の判定の結果、右側方或いは右斜め後に他車両CBが存在しない場合、左走行区分線Laに対して第2判定ラインLd2、右走行区分線Laに対して第1判定ラインLd1を夫々設定し、S5の車線逸脱判定ステップに移行する。
(もっと読む)
車両システムの制御方法および車両システム
【課題】エンジンの自動停止、再始動を行う車両において、クラッチの状態を検出する検出手段に異常が生じたとき、車両の走行を支障なく行い得る状態を確保する。
【解決手段】エンジンと、駆動輪と、動力の伝達、遮断を行うクラッチと、このクラッチの状態を検出するクラッチセンサ類とを有する車両システムにおいて、自動停止条件成立時に運転中のエンジンを自動停止させる工程と、自動停止後における再始動条件成立時にエンジンを再始動させる工程と、クラッチセンサ類に異常があるとき、エンジン運転中に上記所定の自動停止条件が成立した場合であってもエンジンの作動を継続する工程とを有する。
(もっと読む)
変速機付エンジンの制御装置。
【課題】慣らし運転時のアップシフトのタイミングを的確に把握することができると共に、慣らし運転中であっても緊急時に必要な駆動力を得ることができるようにする。
【解決手段】車両の総走行距離Dに基づいて慣らし上限エンジン回転数Naを設定し(S3)、この慣らし上限エンジン回転数Naに基づいて変速段毎の慣らし上限車速Saを設定する(S4)。そして車体の加速度Gxに基づき設定時間t後の推定車速Smを算出し(S12)、推定車速Smが慣らし上限車速Saを超えている場合、予告警報フラグF1をセットする(S14)。予告警報フラグF1がセットされると、スピーカからエンジン回転数Neが許容回転をオーバーする旨の音声が出力され、運転者に注意を喚起する。運転者はスピーカからの音声を認識することで、アクセルペダルの踏込みを緩める等してアップシフトさせる。
(もっと読む)
車両運動制御システム
【課題】協調制御が行われている複数の車両制御装置の内の1つが電圧異常により制御を停止した場合でも、他の車両制御装置が予期しない動作を起こすことがないように構成された車両制御システムを提供する。
【解決手段】協調制御信号のやり取りにより協調制御が行われているEPS、VSA及びRTCの各コントローラ1〜3の内の1つが、電源装置からの供給電圧の異常により制御を停止する際に、他のコントローラにおいて協調制御を中止する。これにより、他のコントローラは協調制御を伴わない基本的な制御に移行するため、他のコントローラが予期しない動作を起こすことを回避することができる。
(もっと読む)
乗員保護装置
【課題】より適切な乗員保護を行うことができる乗員保護装置を提供すること。
【解決手段】本発明による乗員保護装置1は、両の乗員の意識の向上又は低下を数値で示す項目Cを検出する意識検出手段3aと、項目Cが第一閾値αにより定められる第一領域内となる場合に、乗員の覚醒を促す覚醒手段6aと、項目Cが第二閾値βにより定められる第二領域内となる場合に、車両を退避させる退避手段3b、3cと、退避手段3b、3cが作動可能であるかを判定する判定手段3dを備えるとともに、項目Cが第二領域内となる場合であって、判定手段3dが退避手段3b、3cは作動可能であると判定する場合に、覚醒手段6aによる覚醒を禁止する禁止手段3eを備えることを特徴とする。
(もっと読む)
車両用制御装置、及び車両用制御方法
【課題】車両が逆走していることが検出された場合に安全性を向上する車両用制御装置及び車両用制御方法を提供すること。
【解決手段】車載装置40を制御する車両用制御装置10において、車両が逆走していることを検出する逆走検出手段12と、逆走検出手段12により車両が逆走していることが検出されると、車載装置40の作動条件及び/又は制御量を変化させる変化手段14と、を備える。
(もっと読む)
車両の運転支援装置
【課題】実際の回避走行に沿った目標自車進路を設定して自然な運転支援を行う。
【解決手段】制御ユニット5は、対象物と自車両1との相対速度Vfと対象物の種類に応じて対象物からの横移動量Wを設定し、対象物からの横移動量Wと距離dとに基づいて目標自車進路を推定し、最大横加速度(d2y/dt2)maxを推定する。そして、最大横加速度(d2y/dt2)maxが、警報制御閾値Ca以上の場合は警報制御を行ない、ブレーキ制御閾値Cb以上の場合は警報制御を行うと共にブレーキ制御を行う。また、許容最大横加速度(d2y/dt2)max_cを設定し、許容最大横加速度(d2y/dt2)max_cと対象物からの横移動量Wと自車速Vとに基づいて限界自車進路を推定して必要横加速度(d2y/dt2)cを演算し、実横加速度(d2y/dt2)rと必要横加速度(d2y/dt2)cとに基づいて操舵制御を行う。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において重要度の高いがタスクの待ち時間が長い場合に、待ち時間を短縮する。
【解決手段】複数の各タスクに、実行順序の優先度に応じて設定した初期重み値を与え、該初期重み値に基づく実行順序に従って前記複数のタスクを実行する車両制御装置において、各タスクの重要度に応じて重み付け値(W)を付与しておき、実行待ちタスクの待ち時間に基づいてタスクの実行順序の優先度を変更する。
(もっと読む)
21 - 40 / 143
[ Back to top ]