
Fターム[3D041AC30]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089) | 制御ユニット (449)
Fターム[3D041AC30]に分類される特許
81 - 100 / 449
車両用運転操作補助装置、車両用運転操作補助方法および自動車
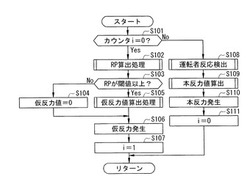
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法

【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
自動車およびその制御方法
【課題】バネ上構造物の振動をより適正に抑制する。
【解決手段】最大出力要請トルクTmmaxがモータMG2の定格トルクの正トルクTlimmaxからマージンαを減じた値以下であると共に最小出力要請トルクTmminがモータMG2の定格トルクの負トルクTlimminからマージンαを加えた値以上であるときには、出力要請トルクTmをトルク制限Tmin,Tmaxで制限した値としてモータトルク指令Tm2*を設定し(S200)、最大出力要請トルクTmmaxが正トルクTlimmaxからマージンαを減じた値より大きいときや、最小出力要請トルクTmminが負トルクTlimminからマージンαを加えた値未満であるときには、非バネ上制振実行トルクTmvをトルク制限Tmin,Tmaxで制限した値としてモータトルク指令Tm2*を設定する(S210)。
(もっと読む)
車両運転支援装置
【課題】道路インフラ側の整備や交信機能の普及向上を要することなく、逆光によって運転者に見え難くなった交通信号機や道路標識などの交通情報を認識可能にして、その交通情報に従った対応を行なうことで、運転者が交通情報を見落として重大な事故を引き起こすことを未然に且つ確実に防止する。
【解決手段】車両前方画像から交通情報の存在する領域が分割され、その領域の明度分散が算出され、明度分散が所定値を超える領域が候補領域として認識される。候補領域が認識されると、その候補領域における交通情報の認識が可能になる絞り値が、その候補領域の明度分散に基づいて算出され、その絞り値で車両前方画像が再撮像される。
(もっと読む)
車両運動制御装置
【課題】セルフステア状態が発生しても、実ヨーレートを適正に制御できる車両運動制御装置を提供する。
【解決手段】予め取り決められた規範ヨーレートを目標値として車両に発生する実ヨーレートを制御するダイレクトヨーコントロールデバイスを有し、ステアリング装置にセルフステアが発生すると、規範ヨーレートに替えて、実ヨーレートを抑制するように目標値を設定する。セルフステア状態を原因として発生する実ヨーレートを、一律に抑制して低減させるので、運転者に違和感を与えることのない適正な制御を実ヨーレートに行うことができる。
(もっと読む)
挙動制御装置
【課題】車両が旋回走行するとき、車両の挙動に運転者が違和感を持つことを回避できる、挙動制御装置を提供する。
【解決手段】車両が旋回走行する際の目標横加速度を求め、目標横加速度に基づいて目標ヨーレートを求め、車両が旋回走行する際の実ヨーレートを目標ヨーレートに近づけるように車両の挙動を制御する、挙動制御装置において、車両が旋回走行する際の半径に基づいて、将来の横加速度を推定する第1推定手段(ステップS)と、車両における現在の横加速度に基づいて、将来の横加速度を推定する第2推定手段(ステップS2)、と、車両における現在のステアリングホイールの操舵角に基づいて、将来の横加速度を推定する第3推定手段(ステップS3)と、第1推定手段(ステップS1)または第2推定手段(ステップS2)または第3推定手段(ステップS3)により推定された横加速度のうち、最小値を目標横加速度として選択する選択手段(ステップS7)とを備えている。
(もっと読む)
路面状態推定装置
【課題】タイヤ内の音を測定するタイヤ内音測定手段音測定信号に基づいて、路面状態の推定を高精度に行う。
【解決手段】路面状態推定装置10は、予め定められたI個の路面状態と、予め定められたJ個の車両速度領域とを組み合わせたIxJ個の条件下で車両を走行させて得られたIxJxK個の基準特性値P0ijk(i=1,2,・・,I,j=1,2,・・,J,k=1,2,・・,K)を格納する記憶部4を具え、演算手段3は、車両走行下で、タイヤ内音測定信号と、車両速度信号とをリアルタイムに入力し、車両速度領域Vnを推定するとともに、音測定信号からK個の各周波数帯域Fkに対する強度もしくは物理量Pを、測定特性値P1nkとして算出し、これらのK個の測定特性値P1nkと、K個の基準特性値P0ink(i=1,2,・・,I,k=1,2,・・,K)と、を比較することにより、路面状態を推定する。
(もっと読む)
電動車両の旋回補助装置
【課題】旋回応答性を確保しつつ車両のタイヤ磨耗を効果的に低減できる電動車両の旋回補助装置を提供すること。
【解決手段】操舵輪101,102の操舵角を調節するハンドル108と、操舵角に基づいて目標車輪スリップ角を算出する目標車輪スリップ角算出手段151と、車両状態量を検出する車両状態検出手段と、車両状態量に基づいて実車体スリップ角を算出する実車体スリップ角算出手段152と、実車体スリップ角と操舵角に基づいて実車輪スリップ角を算出する実車輪スリップ角算出手段153と、目標車輪スリップ角と実車輪スリップ角の差分から必要ヨーモーメントを算出する必要ヨーモーメント算出手段154と、必要ヨーモーメントを発生させるためのトルク補正量を算出するトルク補正量算出手段155とを備え、モータ105,106によって、トルク補正量に基づいて補正されたトルクを駆動輪103,104に個別に与える。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、オーバーステア発生時における車両の挙動を好適に安定化させるとともに、オーバーステアの限界領域でドライバに違和感を及ぼすことを抑制し、また、制動力制御を終える際の制御の収束性を高めることができるようにする。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30と、を備えた車両の運動制御装置であって、制動及びエンジン制御ECUが車両のオーバーステア状態を検知して制動力制御を開始するタイミングを検出したことに基づいて、操舵制御ECUの制御が中止される、ことを特徴とする。
(もっと読む)
車両の駆動力制御装置
【課題】車両が低車速かつ大舵角旋回をおこなう場合に最大ヨーモーメントを発生させる駆動制御装置を提供すること。
【解決手段】車速が所定車速以下かつ操舵角が所定角以上で車両Veが旋回をおこなう場合に、車両重心点P周りに最大ヨーモーメントMを発生させるように、車両Veの駆動トルクが制御されるとともに、最適な操舵角θが操舵輪に与えられるように構成されている。アッカーマンステアリングジオメトリが考慮されて駆動輪が出力する駆動トルクが制御され、また、最適な操舵角θが与えられるので、車両Veの最小旋回半径を低減させることができる。
(もっと読む)
車両運動制御システム
【課題】車両の旋回運動時にアンダステア状態またはオーバステア状態になったとき、スムーズな旋回運動に移行ができる車両運動制御システムを提供する。
【解決手段】車両用ブレーキ液圧制御装置の制御機能部であるVSA制御部は、車両の旋回状態がアンダステア状態であるか否か、また、車両の旋回状態がオーバステア状態であるか否かを判定する。VSA制御部は、車両の旋回状態がアンダステア状態と判定したときは、旋回内側の車輪に制動力を付与し、後輪トー角制御部が、VSA制御部のこの判定を受けて、旋回外側の後輪をトーインに設定する。VSA制御部は、オーバステア状態と判定したときは、旋回外側の車輪に制動力を付与し、後輪トー角制御部が、VSA制御部のこの判定を受けて、旋回内側の後輪をトーインに設定する。
(もっと読む)
動力伝達装置
【課題】エンジンと電動機の動力を高効率で合成することが可能なハイブリッド車両用動力伝達装置を提供する。
【解決手段】主クラッチCMによって選択的に、エンジン2の出力軸2aと連結される第1主入力軸11と、主入力軸11と同軸心に配置され、それぞれクラッチC1,C2によって選択的に主入力軸11と連結される第1、第2副入力軸12,13と、第1、第2副入力軸12,13とそれぞれギヤ対15,16を介して結合され、カウンタ軸17を介して駆動輪4,4に動力を出力する出力軸14と、主入力軸11に接続されたサンギヤ9s、電動機3に接続されたリングギヤ9r、及び第1副入力軸12に接続されたキャリア9cを互いに差動回転可能に構成し、キャリア9cを介して出力軸14に合成動力を伝達する動力合成機構9とを備える。
(もっと読む)
車両運動制御装置
【課題】車両挙動を制御する複数のデバイスが共有するセンサの故障時における車両挙動の安定化を実現する。
【解決手段】CANを介して車両制御を行うデバイス1・デバイス2・デバイス3と、ヨーレートセンサ4とが接続され、各デバイスはそれぞれの運動制御にヨーレート検出値を用いる。ヨーレートセンサの故障を例えばデバイス3が検知した場合には、他のデバイス2・3がその故障を検知していない場合でも、ゲインを低減する。1つのデバイスの制御停止により残りのデバイスがそれを補うために制御量を大きくして車両挙動に悪影響を及ぼしてしまう場合でも、ゲインの低下により、その影響を小さくすることができ、車両運動の安定化を保持できる。また、残りのデバイスにおいてもセンサ故障が確定して制御停止に移行する場合にも、小さなゲインにより制御量を下げておいた状態から機能停止することができるため、車両挙動の急変を抑制することができる。
(もっと読む)
車両の駆動トルク制御装置
【課題】エンジンにより駆動される補機の機能への影響をできるだけ抑えつつ車両の駆動トルクが所要の値になるようエンジンの出力トルク及び補機の消費トルクを制御する。
【解決手段】車両の目標駆動トルクTvtが演算され(ブロック100〜120)、目標駆動トルクの低周波成分がエンジン14の目標制御トルクに分配されると共に、低周波成分以外の目標駆動トルクの成分が補機としてのコンプレッサ34及びオルタネータ36の目標制御トルクに分配される(ブロック130)。そしてエンジンの目標制御トルクTetと補機の必要消費トルクTcreq、Tareqとの和に基づいてエンジンの出力トルクが制御され、補機の必要消費トルクより補機の目標制御トルクを減算した値に基づいて補機の消費トルクが制御される(ブロック150〜180)。
(もっと読む)
フロントエンジン・フロントドライブ車両用駆動制御装置
【課題】差動装置の複雑化、大型化及び重量増加を回避することを可能とし、車両の旋回特性を的確に制御することを可能としたフロントエンジン・フロントドライブ車両用駆動制御装置を提供する。
【解決手段】ブレーキ装置19,20により左右後輪17,18側の旋回内輪に伝達される駆動力を減少させ、リアデフ16により左右後輪17,18の旋回外輪に伝達される駆動力を旋回内輪の駆動力が減少した分に応じて増大させるように制御する。車両の回頭側に有効なヨーモーメントを的確に発生させ、オーバーステアを抑制する。
(もっと読む)
車両の駆動トルク制御装置
【課題】車両の目標駆動トルクが比較的高い周波数にて変動する場合にも、車両の駆動トルクが車両の目標駆動トルクになるようエンジンの出力トルク及び複数の補機の消費トルクを最適に制御する。
【解決手段】車両の目標駆動トルクが演算され(ブロック100〜120)、カットオフ周波数が低いローパスフィルタの処理により目標駆動トルクの低周波成分がエンジン14の目標制御トルクに分配され、カットオフ周波数が高いローパスフィルタの処理により目標駆動トルクの中間周波数の成分がコンプレッサ34の目標制御トルクに分配され、目標駆動トルクの残余の成分がオルタネータ36の目標制御トルクに分配される(ブロック130)。そしてエンジンの出力トルク及びコンプレッサ34、オルタネータ36の必要消費トルクが対応する目標制御トルクに基づいて制御される(ブロック150〜180)。
(もっと読む)
駆動制御装置
【課題】エンジンをクランキングする際に、共振帯域を速やかに通過させる。
【解決手段】モータ3だけを駆動制御して走行している状態から、エンジン2の始動要求がなされたら(ステップS3、S4が共に“Yes”)、クラッチ4を接続し(ステップS6)、前輪1FL・1FRの回転によって、停止状態にあるエンジン2のクランキングを開始する。このとき、エンジン回転数Neが所定値thより低い間は、変速機5の変速比を、車速Vが低いほど、通常変速比よりもハイ側となる始動変速比に制御する(ステップS8)。一方、モータ3の駆動力は、クランキングトルクによって奪われるので、そのクランキングトルク分に相当する所定量ΔTだけモータトルクを増加補正する(ステップS9)。
(もっと読む)
車両の駆動力制御装置
【課題】低負荷時に求められる車速変動に対し駆動力段差の無いスムーズさと高負荷時に求められる変速に伴って駆動力が変化するリズム感を併せて実現することができる車両の駆動力制御装置を提供すること。
【解決手段】トルク制御可能なエンジンEng、モータ/ジェネレータMGと、変速比を有限な段数で制御可能な自動変速機ATの組み合わせにより左右後輪RL,RRに伝達する駆動力を制御する。このFRハイブリッド車両の駆動力制御装置において、要求駆動力を示す負荷を検出するアクセル開度センサ16を設ける。そして、駆動力制御手段(図6)は、アクセル開度と車速に応じてタイヤの駆動力の目標値を割り付ける「駆動力デマンド制御」と、アクセル開度と動力源の回転速度に応じて動力源の出力軸トルクの目標値を割り付ける「トルクデマンド制御」を、検出された負荷に応じて切り替える。
(もっと読む)
車両運転支援装置
【課題】停車場所の状況により必要な車間距離を取って停車するように運転者に促したり制動を掛けたりするとともに、必要に応じて衝突の回避措置を強制的に行ない、他車両との衝突を確実に防止する。
【解決手段】車両(自車)100の前方もしくは後方の車間距離と、自車100の接地面の勾配や状況とに基づき、自車100の前方もしくは後方について必要な車間距離が決定され、この必要車間距離と現在の車間距離とに応じ、自車100の運転者に対する通知もしくは警報または自車100の制動もしくは操舵が行なわれる。
(もっと読む)
車両の運動制御装置
【課題】日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】車両の横滑り情報から算出したヨーモーメント制御指令に基づいて、四輪のうちの左右輪に異なる制駆動力を発生するモードで実現される車両前後加速度が、横運動に連係した加減速制御指令との差が近くなるように四輪のうちの左右輪に略等しい制駆動力を加えるように補正制御する。
(もっと読む)
81 - 100 / 449
[ Back to top ]