
Fターム[3D041AC30]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089) | 制御ユニット (449)
Fターム[3D041AC30]に分類される特許
141 - 160 / 449
内燃機関の制御装置及び車両の制御装置
【課題】内燃機関の制御装置及び車両の制御装置において、製造コストの増加を抑制しながら内燃機関に発生する振動を低減可能とする。
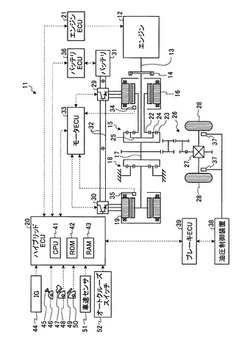
【解決手段】内部で燃料を燃焼させることで発生した熱エネルギによりピストンを往復移動させて回転エネルギとして取り出すエンジン12と、モータ16による発電またはバッテリ31の蓄電により駆動可能なモータ19とを動力源として有し、エンジン12の燃焼により発生するトルク変動と、エンジン12におけるピストンの往復移動により発生するトルク変動とが互いに打ち消しあうように、エンジン回転数及びエンジン出力トルクを制御する。
(もっと読む)
車両の制御装置及びその制御方法

【課題】渋滞中など車両が急発進できない状況にあるときには、電動ポンプを起動せずにエンジンを停止後エンジンを再始動させる第1の制御態様で制御し、上記以外の状況にあるときには電動ポンプを起動してエンジンを停止後エンジンを再始動させる第2の制御態様で制御するようにした車両の制御装置及び車両の制御方法を提供することである。
【解決手段】電動ポンプを装備した自動変速機を備え、車両の停止中に所定の停止条件成立時にエンジンの自動停止自動始動を行う車両の制御装置において、アイドル停止条件が成立したとき、車両の状況が急発進困難な状況のときは、電動ポンプを起動せずにエンジンを停止後再始動させる第1制御態様で制御し、急発進可能な状況のときは、電動ポンプを起動してエンジンを停止後再始動させる第2制御態様で制御する。
(もっと読む)
ハイブリッド型産業車両のインチングペダルシステム
【課題】ハイブリッド型フォークリフトにおいて、半クラッチ状態にして低速・高トルク走行を実現する。
【解決手段】エンジンと電動モータ2の駆動力により駆動輪が回転駆動するハイブリッド型フォークリフトに、インチングペダル33を備えた。低速走行時にアクセルペダル31を踏みながらインチングペダル33を踏み込んでいくと、コントローラ100は、インチングペダル33の踏み込みに合わせてクラッチを接続状態から半クラッチ状態に移行し低速高トルク走行を可能とし、更に踏み込むとインバータ5により走行用電動モータ2の駆動力を弱め、更に踏み込むとインバータ5により走行用電動モータ2により制動回生をさせ、更に踏み込むとブレーキペダル32が機械的に押し下げられて機械式ブレーキが作動する。高速走行時にアクセルペダル31を踏みながらインチングペダル33を踏んでも、エンジン回転数をアイドリング回転数に保持して燃費悪化を抑制する。
(もっと読む)
車両の前後力制御装置
【課題】障害物等を緊急回避するために車輪の制動力を制御する車両の前後力制御装置において、制御が不必要に継続して車両の安定性を損なうことがないものを提供すること。
【解決手段】障害物回避補助制御として、第1制御、第2制御、第3制御がこの順で続けて実行される。第1制御では、左右輪の前後力差に基づく旋回方向のヨーモーメントを発生させるため旋回内輪の制動力の和が旋回外輪の制動力の和よりも大きくなるよう各車輪の制動力がパルス的に調整される。第2制御では、タイヤの横力を増加させるため車両の全車輪の制動力の総和が第1制御実行中よりも小さくなるよう各車輪の制動力がパルス的に調整される。第3制御では、車体スリップ角の過度の増大を抑制するため旋回内輪の制動力の和が旋回外輪の制動力の和よりも小さくなるよう各車輪の制動力がパルス的に調整される。第1〜第3制御での各パルス調整パターンが第1制御開始前に予め決定される。
(もっと読む)
変速機付エンジンの制御装置。
【課題】慣らし運転時のアップシフトのタイミングを的確に把握することができると共に、慣らし運転中であっても緊急時に必要な駆動力を得ることができるようにする。
【解決手段】車両の総走行距離Dに基づいて慣らし上限エンジン回転数Naを設定し(S3)、この慣らし上限エンジン回転数Naに基づいて変速段毎の慣らし上限車速Saを設定する(S4)。そして車体の加速度Gxに基づき設定時間t後の推定車速Smを算出し(S12)、推定車速Smが慣らし上限車速Saを超えている場合、予告警報フラグF1をセットする(S14)。予告警報フラグF1がセットされると、スピーカからエンジン回転数Neが許容回転をオーバーする旨の音声が出力され、運転者に注意を喚起する。運転者はスピーカからの音声を認識することで、アクセルペダルの踏込みを緩める等してアップシフトさせる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】車両用動力伝達装置において、変速ショックを低減できる制御装置を提供する。
【解決手段】係合圧制御手段78は、第2電動機M2の作動が電動機電力収支Wmに対する制約によって制限されるとの判定を電力収支制約判定手段72が肯定した場合には、そうでない場合と比較して、自動変速部20の変速中における係合側係合圧を高くする。従って、自動変速部20の変速中における上記係合側係合圧が適切に調整されることにより、自動変速部20の変速中における自動変速部20の入力回転速度N18を適切な変化率で変化させ、変速ショックの低減を図り得る。例えば、自動変速部20のアップシフト中の係合側係合圧が高められることは、第2電動機M2の作動制限により自動変速部20の入力トルクが相対的に増加する場合に、その入力トルク増加が入力回転速度N18の変化率に与える影響を打ち消す方向に作用する。
(もっと読む)
ビークルを運転する方法及び関連システム
【課題】電気駆動装置を持つビークルを運転する方法を提供する。
【解決手段】本方法は、第1の区域及び第2の区域を規定する段階を含む。第1の区域は関連した第1の特性を持ち、また第2の区域は第1の特性とは異なる関連した第2の特性を持つ。本方法は更に、ビークルが第1の区域から第2の区域へ移動することに応答してビークルの運転モードを第1の区域内での第1の運転モードから第2の区域内での第2の運転モードへ切り換える段階を含む。本発明では、関連したビークル及びシステムも提供する。
(もっと読む)
車両の制駆動制御装置及び自動運転制御方法
【課題】自動運転の解除時の走行状況に応じて運転者の違和感を緩和する。
【解決手段】自車両の加減速制御を行い少なくともカーブ進入前にカーブを走行可能な目標車速に制御する自動運転制御を備える。その自動運転制御が解除されても、次のカーブまで自車両の減速状態が維持しない状態と推定される場合には、減速制御を維持する。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】前方の障害物などを操舵回避する際の、無用な制御介入を制限する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定の閾値XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方車両の側とは逆方向に横移動することを検知したら回避フラグをFa=1にセットし(ステップS6)、その後、今度は側方車両の側に横移動を開始したら復帰フラグをFr=1にセットする(ステップS7)。こうして復帰フラッグがFr=1にセットされたら、設定時間Tmが経過するまで抑制フラグをF=0にリセットし、横移動の抑制を禁止する(ステップS9)。
(もっと読む)
側方障害物回避装置及び側方障害物回避方法
【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
内燃機関のEGR装置
【課題】内燃機関のEGR装置において、EGR弁が目標開度に合わない場合であってもEGRガスを適正量供給することができる技術を提供する。
【解決手段】内燃機関の排気通路と吸気通路とを接続するEGR通路と、EGR通路で開閉するEGR弁と、EGR通路が接続されるよりも下流側の吸気通路において吸気の通路断面積を調節する調節装置と、EGR弁の開度が目標開度に合わないときであって該目標開度よりも大きい場合には、EGR弁の開度が目標開度に合っているときと比較して、調節装置よりも上流側のガスの圧力が上昇する方向へ該調節装置を作動させる制御装置と、を備える。
(もっと読む)
車両運動制御システム
【課題】既存の車両制御装置に対して大幅な変更を加えることなく、しかも互いの干渉を抑制して協調した動作を実現することのできる車両運動制御システムを提供する。
【解決手段】車両の挙動を制御する複数の車両制御装置としてのVSA及びRTCと、これらと通信線を介して接続される集中制御装置としての協調制御部17とを有し、VSA及びRTCと協調制御部はそれぞれ、規範ヨーレートを算出する規範ヨーレート算出部10,15,18を備えており、協調制御部が正常であるときは、VSA及びRTCの各々が、協調制御部から取得した規範ヨーレートに基づいて制御を行い、協調制御部が異常であるときは、VSA及びRTCの各々が、自装置内で算出された規範ヨーレートに基づいて制御を行うものとする。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】ドリフト走行時等において好適な旋回走行を実現するヨー制御を行う車両用動力伝達装置の制御装置を提供する。
【解決手段】予め定められた関係から前輪の横滑り角βf及び車体の速度Vに基づいて目標ヨー角速度γrefを算出する目標ヨー角速度算出手段66と、その目標ヨー角速度算出手段66により算出された目標ヨー角速度γrefに応じたヨーモーメントが得られるように前記トルク配分制御装置50の作動を制御するヨーモーメント制御手段70とを、備えたものであることから、車体の横滑り角が比較的大きいドリフト走行時においても、前輪横滑り角が旋回方向内側を向いている場合には旋回アシスト方向のヨーモーメントを発生させる等、ドリフト走行を妨げないヨー制御が実現できる。
(もっと読む)
車両運動制御システム
【課題】協調制御が行われている複数の車両制御装置の内の1つが電圧異常により制御を停止した場合でも、他の車両制御装置が予期しない動作を起こすことがないように構成された車両制御システムを提供する。
【解決手段】協調制御信号のやり取りにより協調制御が行われているEPS、VSA及びRTCの各コントローラ1〜3の内の1つが、電源装置からの供給電圧の異常により制御を停止する際に、他のコントローラにおいて協調制御を中止する。これにより、他のコントローラは協調制御を伴わない基本的な制御に移行するため、他のコントローラが予期しない動作を起こすことを回避することができる。
(もっと読む)
操作支援装置および操作支援方法
【課題】作動機構制御(車両運動制御を含む)において、操作者(車両運転者を含む)の認定や操作者の操作を正確にモニタして推定を行い、この推定結果に基づいて作動機構の動作(車両運動を含む)をより安全かつ快適にすることができる操作支援装置および操作支援方法を提供する。
【解決手段】筋骨格状態検知部を制御して操作者の筋骨格状態情報を取得し、取得された筋骨格状態情報に基づいて、操作者により操作部材の操作が行われるか否かを予測し、操作部材の操作が行われると予測された場合、当該操作部材が操作される前に、作動機構の実動作の前処理動作を実行するか、または、実動作を開始する。
(もっと読む)
車両運動制御システム
【課題】駆動力配分制御装置と制動力制御装置とを協働させる構成において、動荷重に対する駆動力配分制御装置の耐久性を維持できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、左右の駆動輪11RR、11RLに駆動力を付与すると共に左右の駆動輪11RR、11RLへの駆動力配分を制御できる駆動力配分制御装置2と、各駆動輪11RR、11RLの制動力を独立して制御できる制動力制御装置3とを備える。この車両運動制御システム1では、車両10がリバースステア状態となることが予測されるときに、駆動力配分制御装置2が駆動力配分制御を停止し、また、制動力制御装置3が制動力制御を行う。
(もっと読む)
車両用走行路面検出装置
【課題】簡単な構成でかつ小さい処理負担で、自車両が走行する走行路面の勾配状態を検出できるようにする。
【解決手段】第1地点で撮像された第1画像中の走行路面に基づいて、上記第1地点から該第1地点に対して所定距離先にある第2地点まで同じ勾配が継続すると仮定して、その仮想走行路面での第2地点の走行路幅を第1走行路幅として算出し(ステップS3,S4)、第2地点の手前近傍の地点に達したときに撮像された第2画像中の走行路面に基づいて第2地点の走行路幅を第2走行路幅として算出し(ステップS8,S9)、上記第1走行路幅と上記第2走行路幅との大小関係に基づいて、第2地点での走行路面の勾配状態を判定する(ステップS10)。
(もっと読む)
車両の制御装置
【課題】排気浄化装置の浄化能力を回復させる回復制御を行う車両において、クロール制御を安定して行うことができる車両の制御装置を提供する。
【解決手段】車両は、ディーゼルエンジンの排気の浄化を行う触媒コンバータ及びPMフィルタを含む排気浄化装置が設けられる。排気浄化装置における浄化能力を回復させる回復制御に相当するPM再生制御及びS被毒回復制御が電子制御装置により行われる。また、電子制御装置により車両の速度を所定の低速領域に維持するクロール制御が実行される。クロール制御が実行される際に回復制御の実行を禁止する回復制御禁止判定処理が電子制御装置により実行される。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速させるための制御を実施する状態と実施しない状態とを利用者の意図通りに柔軟に切り替えることができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動制御と手動制御とを設定するための制御設定部における設定が手動制御から自動制御に切り替えられたことを判別し、前記設定が前記手動制御から前記自動制御に切り替えられた場合に、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるとともに、前記自車両の変速比を前記加速変速比に設定させる。
(もっと読む)
車両の制御装置
【課題】EGR弁閉じ異常時において失火発生抑制のためスロットル弁開度を大きくすることに起因する内燃機関の出力トルクの増大に伴って発生する問題に対処すること。
【解決手段】車両停止中において、EGR弁閉じ異常の発生を受けて失火抑制制御によりスロットル弁開度が大きくされた場合、急発進抑制制御により自動変速機の減速比が小さくされる。この結果、駆動輪の駆動トルクが減少し、失火抑制制御に起因するエンジン出力トルク増大により車両発進時の加速度が過剰となる事態の発生が抑制される。急発進抑制制御が実行された状態で車両発進後、車体速度が所定速度に達した場合、車速抑制制御により自動変速機の減速比が大きくされる。この結果、車体速度が、減速比が大きい変速段の場合におけるエンジンの最大運転速度に対応する速度以下に制限されるから、エンジン出力トルク増大により車両走行時での車体速度が過剰となる事態の発生が抑制される。
(もっと読む)
141 - 160 / 449
[ Back to top ]