
Fターム[3D041AD00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144)
Fターム[3D041AD00]の下位に属するFターム
推進装置、エンジン (3,466)
クラッチ (608)
サイドクラッチ
インチングクラッチ (2)
変速 (1,080)
ブレーキ (1,198)
車両外部状況 (949)
車両状況 (2,223)
Fターム[3D041AD00]に分類される特許
341 - 360 / 618
車両の衝突防止装置
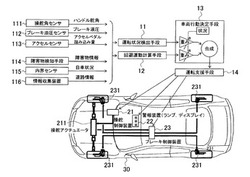
【課題】運転者の入力操作による車両の運動制御と衝突防止装置による車両の運動制御との調整を行い、衝突回避能力を高いレベルに保ちつつ、車両の運動に対する運転者への違和感をできるだけ少なくした車両制御を実現できる衝突防止装置を提供することである。
【解決手段】運転者の運転状況検出手段11と、車両周囲の障害物の情報を基に障害物との衝突を回避するための回避運動計算手段12と、前記回避運動計算手段12の回避運動計算結果と前記運転状況検出手段11で検出した運転者の入力操作とを合成して障害物との衝突を回避する車両行動決定手段13と、前記車両行動決定手段で決定した車両行動に基づいて運転操作の支援を行う運転支援手段14を有し、車両行動決定手段13は、運動マップ上で運転者の入力操作と回避運動計算結果とに重み付けして運転者の入力操作と回避運動計算結果とを合成して障害物との衝突を回避するための車両行動を決定する。
(もっと読む)
車両挙動制御装置

【課題】車両において、車両の慣性主軸傾角に係わらず、所望の操舵応答性が得られるようにすること。
【解決手段】車両挙動制御装置は、車両に搭載され、車両の挙動制御を行う。車両挙動制御装置では、操舵角センサが車両におけるハンドルの操舵角δHを検出し、設定部が検出された操舵角δHと車両の慣性主軸傾角を含む車両データとに基づいて、車両に加える目標ヨーモーメントMを設定する。挙動制御部が、設定部が設定した目標ヨーモーメントMになるよう挙動制御を行う。
(もっと読む)
車両運転補助装置
【課題】可視の、可聴の、および/または触覚的な運転補助情報を車両の運転者に提供するように、および/またはステアリングを補助するように、構成した処理ユニット(10)を提供する。
【解決手段】センサデータを収集するセンサユニット(10)と、センサデータを処理する処理ユニット(11)とを含む車両(2)、センサデータに基づいて、それぞれが車両の縦および横方向の加速度を表す加速度値対のコストを決定するステップと、コストが最も低い加速度値対を選択するステップと、コストが最も低い加速度値の対を含む運転補助情報を提供するステップとを含む運転補助情報を提供する方法。
(もっと読む)
車両用駆動力制御装置
【課題】車両の位置ないしは車両と自動車専用道路の本線に対して接続される接続道路との位置関係を正確に判定して車両の駆動力を制御する。
【解決手段】自動車専用道路の本線から分岐して接続される接続道路と車両との位置関係に基づいて、前記車両の駆動力を制御する車両用駆動力制御装置であって、運転者による前記自動車専用道路の本線と前記接続道路との間の走行路の変更意図を検出又は推定する手段(S3)と、前記車両が前記自動車専用道路の本線と前記接続道路との間で走行路を変更したことを検出する手段(S4)とを備え、前記走行路の変更意図が検出又は推定されている間、又は前記走行路の変更意図が検出又は推定されている状態から予め設定された時間内に、前記車両が前記走行路を変更したことが検出されたときに、前記車両の駆動力の制御を許可する(S5)。
(もっと読む)
車輪接地荷重の変化率に応じて制駆動力制御態様を変更する車輌
【課題】車輪に作用する制動力や駆動力を一旦低減した後漸増する制駆動力制御は多分に動的な制御であり、その態様は車輪接地荷重の変化率によってその最適性が異なることに着目してABS制御やTRC制御を更に改良する。
【解決手段】車輪と路面の間の滑りが増大したとき該滑りを低減する制駆動力制御を行う車輌に於いて、制駆動力制御開始点、制動力または駆動力の一時低減の速度や目標値、一時低減後の回復目標値等の制駆動力制御態様を車輪接地荷重の変化率に応じて変更する。
(もっと読む)
車両の駆動制御装置
【課題】 車両の降坂路旋回中に於いて、車両の挙動をより安定化して運転者又は乗員に不安感を与えないように車両の挙動の制御を行う装置を提供すること。
【解決手段】 本発明の車両の駆動制御装置は、降坂カーブ路を検出する降坂カーブ路検出手段と、前記降坂カーブ路を車両が走行する際に車両の駆動力を増大させる駆動力制御手段とを含み、車両の降坂路旋回中の転がり抵抗の増大の影響を低減してホイール・アライメントの歪みを低減し車両挙動の安定化を図る。
(もっと読む)
車両およびその制御方法
【課題】制御モードの並立の有無を含めて走行時の制御モードを設定する。
【解決手段】エコスイッチ90の操作によるECOモードの設定とスノースイッチ94の操作によるSNOWモードの設定とを独立で並立する関係とし、エコスイッチ90の操作によるECOモードの設定とパワースイッチ92の操作によるPOWERモードの設定とを排他的な関係とし、スノースイッチ94の操作によるSNOWモードの設定とパワースイッチ92の操作によるPOWERモードとを排他的な関係とする。これにより、エコスイッチ90,パワースイッチ92,スノースイッチ94の操作に対して制御モードをより適正に設定することができる。
(もっと読む)
車両の制御装置
【課題】自動変速機2を搭載する車両の制御装置(3,4)において、減速度増加制御(例えば減速フレックスロックアップ制御)と車速調節制御(例えばアジャスタブル・スピードリミッタ制御)とを併用するうえでの整合性を高めて、良好なドライバビリティを確保可能とする。
【解決手段】減速度増加制御と車速調節制御とを併用可能とする構成の車両の制御装置(3,4)は、車速調節制御の実行中において、減速度増加制御の実行と実行解除とを繰り返すハンチングが発生する可能性が有るときに、前記減速度増加制御の実行を禁止するようにしている。これにより、車速を維持する過程において減速処理と加速処理とを繰り返すようになるものの、その繰り返しを、例えば車速調節制御中に減速度増加制御の介入を許容する場合に比べて早期に終了することが可能になって、車速やトルクの変動を短期間で収束することが可能になる。
(もっと読む)
ハイブリッド車両の変速時モード切り替え制御装置
【課題】モータトルク不足時にエンジン始動を伴うモード切り替え要求とダウンシフト要求とが同時に発生した時のショック対策を提案する。
【解決手段】実線で示すように、EV→HEVモード切り替え(エンジン始動)要求と、変速(ダウンシフト)要求とが同時に発生した後、それ用の後述するモータ/ジェネレータ回転数制御を開始すべき瞬時t1に、目標モータ/ジェネレータ回転数tNmをエンジン始動可能回転数と、モータ/ジェネレータ5の出力可能最大トルクTmmaxで達成される最大トルク下モータ/ジェネレータ回転数(Nm+ω)との間における値αに設定して先ずエンジン始動を行い、エンジン始動判定瞬時t2以後目標モータ/ジェネレータ回転数tNmを変速後変速機入力回転数に設定して変速時回転合わせ制御を行う。
(もっと読む)
衝突被害軽減システム
【課題】衝突被害を確実に軽減することができるようにする。
【解決手段】車両の進行方向の物体を検出するレーダ装置11と、走行速度等を検出する車両状態検出部13と、車両が前記物体と衝突する危険度を判定する警報・制動判定部22と、他の車両との間で無線通信を行う無線通信部18と、を備えた複数の車両からなる衝突被害軽減システムであって、第1の車両1に搭載された警報・制動判定部22により第1の車両1の進行方向に存在する第2の車両2に対する衝突危険度が閾値以上と判断された場合には第1の車両1は第2の車両2へ警報情報を送信し、第2の車両2は、第1の車両1から警報情報を受信し且つ第2の車両2のレーダ装置11により第2の車両2の前方所定範囲に物体が検出されない場合に第2の車両2の走行制御手段が第2の車両を発進もしくは停止保持解除または加速を行う。
(もっと読む)
車両制御装置及び演算記憶装置
【課題】例えば道路の状態を算出し、その状態の算出結果をその状態に対応する時点に関連付けて記憶し、その記憶された上記時点及び上記状態の算出結果に基づいて車両が制御される場合に、遅れ時間に起因して不正確な情報に基づいて車両が制御されることを抑制可能な車両制御装置を提供する。
【解決手段】道路及び運転者の少なくともいずれか一方の状態を算出し、前記状態の算出結果を記憶し、前記記憶された前記状態の算出結果に基づいて車両を制御する車両制御装置であって、前記状態の算出結果が得られた第1時点(A)よりも前記状態の算出に要した時間に対応する時点(D)だけ前の第2時点(B)に対応する前記状態として前記状態の算出結果を記憶する。
(もっと読む)
駐車支援方法及び駐車支援装置
【課題】車両をユーザの所望の位置に自動的に駐車させることができる駐車支援方法及び駐車支援装置を提供する。
【解決手段】車両に搭載された駐車支援システム1の制御装置2において、車両に設けられ、車外にいるユーザを撮影する前方カメラ30及び後方カメラ31から画像データG1,G2を取得する画像データ入力部19と、取得した画像データG1,G2に基づき、ユーザが指示する車両の移動量又は方向を判断し、ユーザにより指示された移動量又は方向に基づき、車両を自動制御する駐車制御処理部15とを備えた。
(もっと読む)
車両用安全装置
【課題】車両の進行方向、左右方向へのドライバーの身体のふらつきが抑制され、ドライバーのステアリング操作性が向上する。
【解決手段】衝突前車両制御手段104がシートベルト制御信号を、ブレーキ制御信号よりも早いタイミングで生成する車両用安全装置にあって、ブレーキ制御信号により、自車両が減速制御されている間に、ステアリング操作量が所定値以上となった場合、衝突前車両制御手段104は、ブレーキ制御信号の生成を解除するが、シートベルト制御信号の生成を解除しないようにした。
(もっと読む)
車両の安定性を改善するための車両システムの制御方法
車両の安定性を制御する改良方法が、アクティブヨーコントロールシステム、アンチロックブレーキングシステムおよびトラクションコントロールシステムといった車両安定性制御システムの協調動作によって提供される。これらの方法は、路面摩擦係数μ、車輪スリップおよびヨー偏差を含む路面情報の認識を使用する。該方法は、引き続き、必要に応じて、アクティブダンピングシステムの設定及び/又は駆動トルクの配分を修理して、サスペンションにおけるダンピングを増加/低減させ、かつ車輪でのトルク適用をシフトさせ、それにより車両における著しい荷重のシフトを防ぎ、及び/又は車両ドライバビリティおよび快適性を改善する。アクティブダンピングシステムまたはトルク配分の調整は、予め運転者によって選択されたいずれかの特性を一時的にオーバライドする。  (もっと読む)
(もっと読む)
駐車支援装置
【課題】駐車支援制御の際に段差をよりスムーズに乗り越えることが可能な駐車支援装置を提供すること。
【解決手段】駆動力出力手段(80)が出力する駆動力により、設定された目標駐車位置に車両を誘導する駐車支援装置(1)であって、車両の運動データを計測する運動データ計測手段(30、40、50、60)と、運動データ計測手段により計測された車両の運動データに基づき路面に段差が存在するか否かを判定し、段差が存在すると判定した場合には、運動データ計測手段により計測された車両の運動データに基づいて付加駆動力を導出し、段差が存在しないと判定した場合に駆動力出力手段から出力される基本駆動力に加えて、導出した付加駆動力を出力するように駆動力出力手段を制御する制御手段(90)と、を備えることを特徴とする。
(もっと読む)
車両駆動装置の制御方法および制御装置
【課題】車両駆動装置の制御方法において、運転者に運転モード切り替え時の違和感をより有効に生じにくくすることである。
【解決手段】エコノミーモードスイッチ26のオンとオフとの切り替えにより、燃費を優先するエコノミーモードかノーマルモードかが選択されている場合に、この選択によるエコノミーモードスイッチ26からの検出信号と、アクセル操作量センサ20からの検出信号と、車速センサ22からの検出信号とを、HVコントローラ18に入力する。HVコントローラ18は、エンジン指令出力に対する目標エンジン回転数の関係を表すマップにおいて、エコノミーモードかノーマルモードかで異なる領域においてのみ、エコノミーモード特性とノーマルモードの特性との間で運転点を徐々に移行させる目標エンジン回転数設定用徐変制御ルーチンを行う。
(もっと読む)
走行支援装置
【課題】 乗り心地を悪化させることなく車線維持支援を行うことができる走行支援装置を提供する。
【解決手段】 走行支援装置1は、自車両のヨー角やオフセット、道路曲率を検出するステレオカメラ11、走行路情報を取得するナビゲーションシステム13、およびステレオカメラ11などの検出結果から目標速度パターンを設定し、該目標速度パターンに基づいてスロットルアクチュエータ31やブレーキアクチュエータ33を制御して車両の速度制御を行うECU20などを備えている。ECU20は、実走行軌跡が目標走行軌跡よりも内側に位置している場合には、カーブ路において、車両を加速するように目標速度パターンを設定し、実走行軌跡が目標走行軌跡よりも外側に位置している場合には、車両を減速するように目標速度パターンを設定し、カーブ路走行時に車両に作用する横加速度との均衡点をずらすことによって横偏差誤差を解消する。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両の運動状態を制御する主操作部材に設けた副操作部材の操作でヨーモーメント発生装置の作動を制御するものにおいて、副操作部材が出力する指令信号のノイズの影響を低減する。
【解決手段】 運転者がステアリングホイール7に設けたグリップ9L,9Rを操作すると、そのグリップ9L,9Rの操作に応じてヨーモーメント発生装置が車両のヨーモーメントを変化させるので、ステアリングホイール7を操作して車両の運動状態を制御するのと同時並行して、車両の旋回を補助あるいは抑制することができる。このとき車速の増加に応じてグリップ9L,9Rの操作量に対するヨーモーメントの変化量を変更するので、運転者によるステアリングホイール7の保持力や操作力が増加するためにグリップ9L,9Rの操作にノイズが乗り易くなっても、そのノイズの影響を最小限に抑えてヨーモーメント発生装置が不適切なヨーモーメントを発生するのを防止することができる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】動力分配装置により主動力源の動力が分配される車輪側出力軸に有段変速機を介して電動機が接続されたハイブリッド車両用動力伝達装置における変速に際しての変速ショックを抑制する車両用動力伝達装置の制御装置を提供する。
【解決手段】MG2トルクダウン制御制限手段142は、変速機20の状態及び蓄電装置32の状態のうち少なくとも一方の状態が所定の条件を満たす場合には、その条件が満たされない場合と比較してMG2のトルクダウン量の制限を緩和すると共に、MG1トルクダウン制御手段144によりMG1の出力トルクを低下させるものであることから、MG2のトルクダウン制御を制限すると影響が大きいと判断される場合には、MG1のトルクダウン制御を行い、MG2のトルクダウン制御の制限を緩和することで、変速機20の変速動作に際しての変速ショックを抑制することができる。
(もっと読む)
ハイブリッド車両の制御方法
【課題】モータ走行からハイブリッド走行への移動する際のクラッチ締結時の滑りを減少させ、ショックを低減させる。
【解決手段】ハイブリッド車両10は、内燃エンジン12と、エンジン始動用のISGモータ14と、後輪を駆動するメインモータ26と、エンジン出力軸と前輪車軸との間に設けられたCVTプーリーベルト32と、内燃エンジンの出力軸とCVTの入力軸31との間に設けられたクラッチ16と、バッテリ24と、ハイブリッドコントローラ50と、を備える。ハイブリッドコントローラは、メインモータ26のみの車両走行状態からエンジン駆動力を追加するべきと判定したとき、クラッチ16が開放された状態でISGモータ14でエンジン12を始動させ、CVT入力速度が目標締結速度となるようにCVTの変速比を制御し、エンジン速度を検出し、CVT入力速度を検出し、両者の差が所定の範囲内となったとき、クラッチ16を締結させるように各要素を制御する。
(もっと読む)
341 - 360 / 618
[ Back to top ]